This is a locking secure box for small items that will notify its owner if it is moved by anyone who is unauthorized. An ultrasonic sensor monitors its position and detects if it is moved by its change in position, and an Internet-connected lock allows a user to unlock it and access their items electronically. Paired with the box is a remote transceiver equipped with a buzzer alarm that will sound if tampering occurs. As this box and its receiver are integrated with the Internet of Things (IOT), the system can be monitored remotely with a smartphone or desktop computer as well.
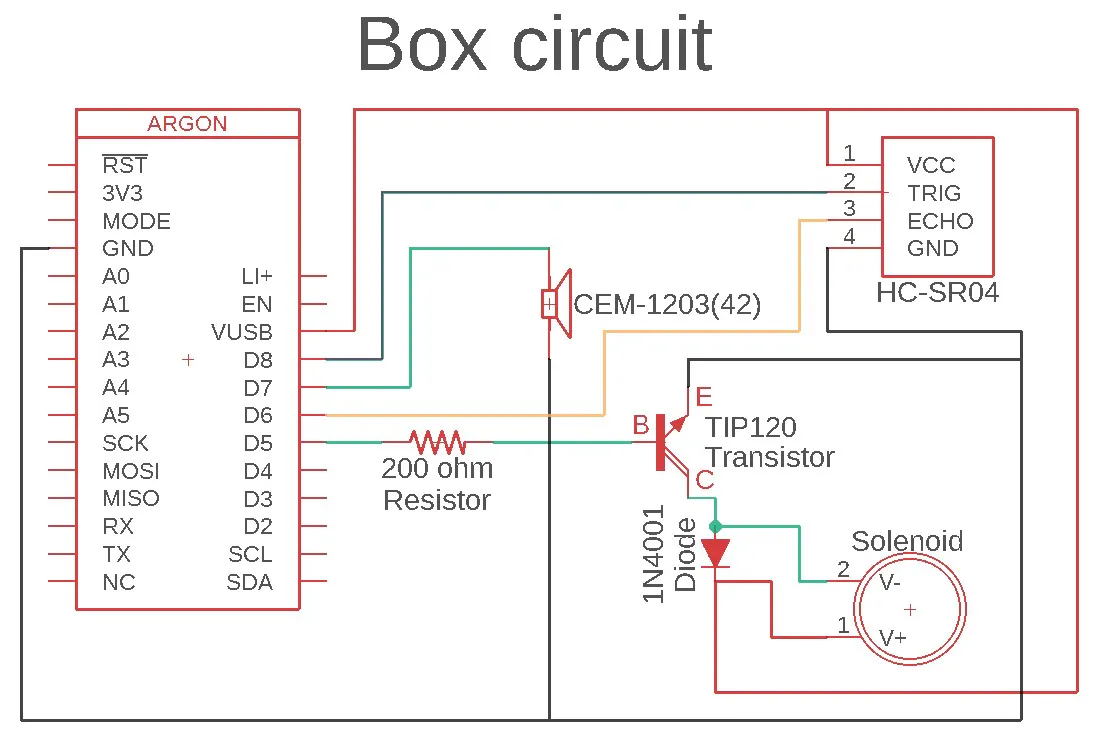
1 / 5 • The control system and ultrasonic sensor in the secure box
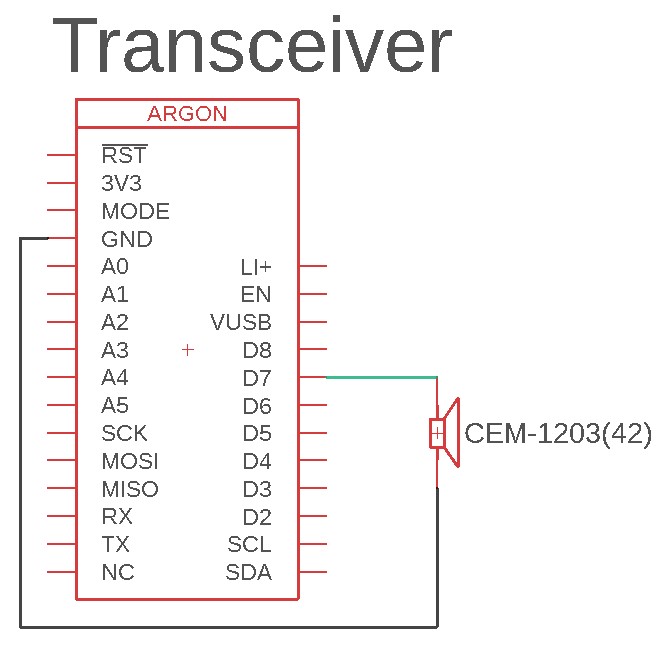
The locking and security system we built can be used in boxes of different sizes. Here, we built a simple box from 0.5-inch plywood that is 12 inches long, 10 inches wide, and 10.5 inches tall. A Particle Argon controls the position-monitoring ultrasonic sensor and lock, and triggers a buzzer alarm mounted in the box. It is powered by an Anker power bank mounted in the box. Another Argon serves as the transceiver and triggers a buzzer that serves as the remote alarm if the box is moved. They are both currently controlled through the Particle console.
The transceiver argon and circuit
It is recommended that the secure box be stored on a shelf or other location where it is below another shelf or the ceiling. In this case, the box must be moved to be opened and an unauthorized attempt to open it will be detected. In the particle console for the transceiver there is a function which temporarily disables the alarm and allows an authorized user to move and open the box. Then, the box can be locked, and the system rearmed.
IFTTT integrationFor this project two IFTTT apps are used, the first of which monitors the events published by the box Argon. If the event sees that the box has been moved a notification is made through the IFTTT app on a smartphone, the setup for this app can be seen below.
Smartphone notification app setup
The second IFTTT app takes the distance measured by the ultrasonic sensor and adds the readings to a Google Sheets document.
The setup for the IFTTT app that monitors the distance variable in the code
The resulting sheet of data can then be converted into a graph as seen below.
Graph of distance values obtained while testing the code from the sheets document




_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)
















{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.