


Hardware components | ||||||
 |
| × | 1 | |||
_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 2 | |||
 |
| × | 7 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
This project was intended to help pet owners feed their pets while they are away from home whether at work, or on vacation! With our motion activated dog feeder, our product uses the communication between two Particle Argons to reliably feed your pets.
The first Argon (Kingsley) uses an ultrasonic sensor to sense the presence of a pet and then sends that signal to the second Argon (Mohra). Argon 2 (Mohra) then activates a servo motor which rotates 90 degrees thereby allowing food to flow through the hole of our 3d printed Food Holder. The pet food then falls out into the designated bowl and after dispensing enough food, the servo rotates back to its original point to cover up the hole. The program of the servo can be easily updated so that less or more food is dispensed at a time. Also, we have assigned a lock out after each meal to avoid overfeeding and waste. The lock out time can easily be adjusted by the owners. Lastly, our program offers a live data that the owners can access from anywhere to know when their dog last meal was and how many meals they are getting throughout the day!
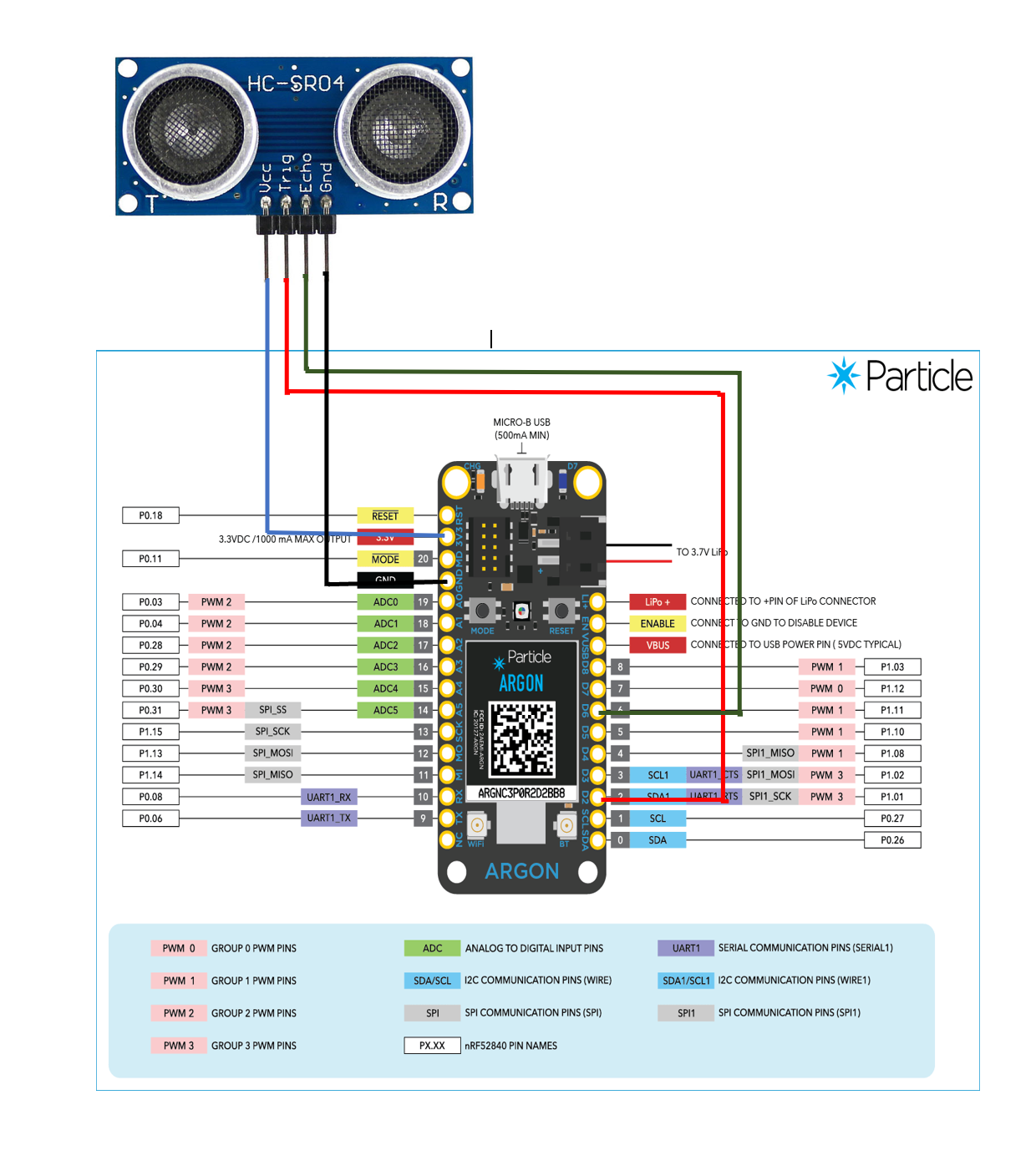
Ultrasonic Sensor Setup with Particle ArgonTechnical Specifications for Ultrasonic Sensor:Power Supply − +5V DC
Quiescent Current − <2mA
Working Current − 15mA
Effectual Angle − <15°
Ranging Distance − 2cm – 400 cm/1″ – 13ft
Resolution − 0.3 cm
Measuring Angle − 30 degree
The Ultrasonic Sensor Has Four Terminals:Connect the 3.3V pin on the Particle Argon to the VCC connection on HC-SR04.
Connect Trigger to digital pin 2 on your Particle Argon.
Connect Echo to digital pin 6 on your Particle Argon.
Connect GND with GND on Particle Argon.
HC-SR04 Ultrasonic Sensor Connection :
Power Supply − +5V DC
Range -180º
Quiescent Current − <2mA
Operating Speed- 0.1 sec/ 60º
Torque – 1.6 kg.cm
Pull Weight – 2.5 kg
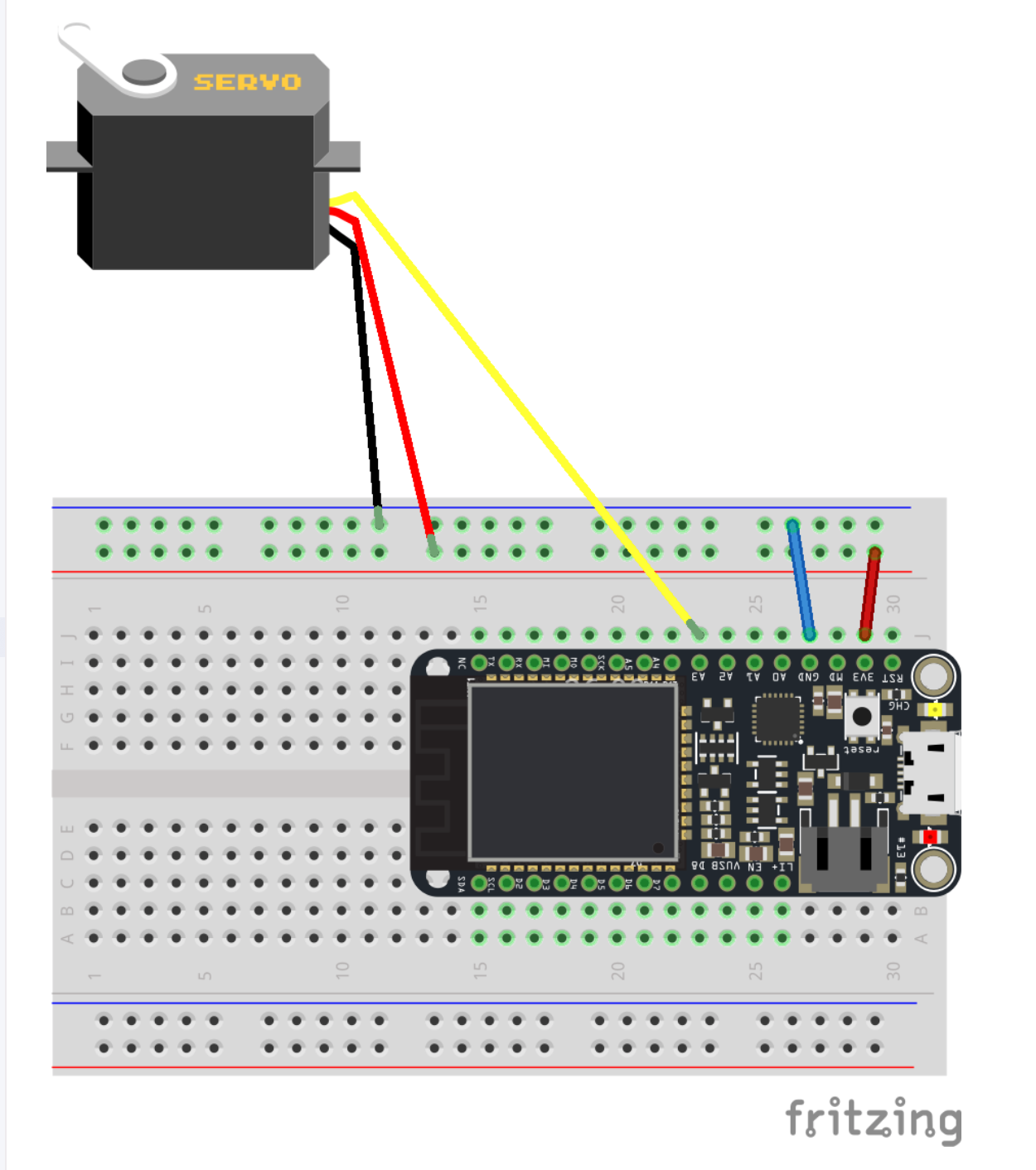
The Micro Servo Motor Has Three Terminals:Connect Brown wire to GND on Particle Argon.
Connect Red wire to 3.3V Pin on Particle Argon.
Connect Orange wire to pin D2 on Particle Argon.
9g Micro Servo Motor Connection:To demonstrate the communication between the two particle Argon devices and to keep track of the pet feeding process, a Live Data MEGR3171_IOTMK was created in google sheets using IFTTT software (https://ifttt.com/explore).
The steps to do so are listed below:1. Create an IFTTT account
2. Click create under applets.
3. Select Add under "If This", and choose Particle.
3. Choose " New Event Published", and enter your Event Name, Event Contents, and the Device Name or ID.
4. Create Trigger then Add to "Then That".
5. Select Google Sheets and specify the name of your google sheet.
6. Select Finish and the applet should be ready to record live events and send the data to google sheets.
The Live Data can be accessed by following the link below:Google Sheets: Data Collected andGraph of Live Data
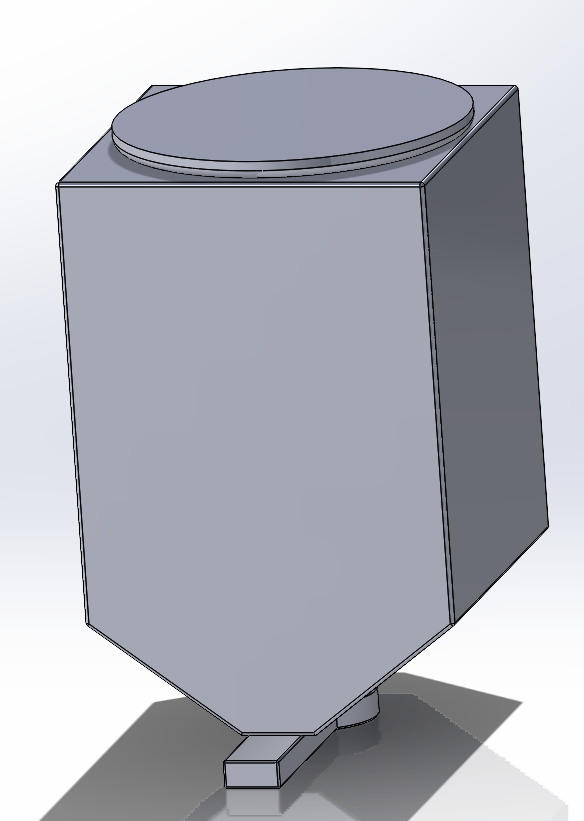
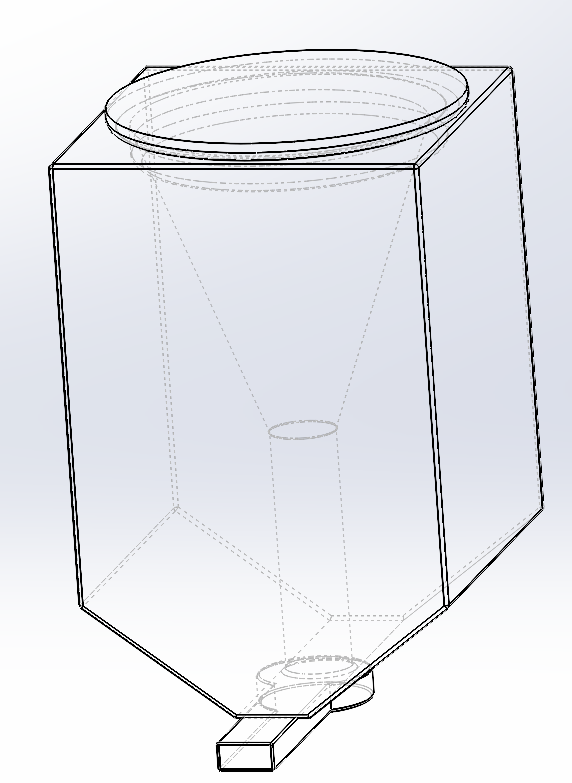
ProjectImages:
3d Printed DesignYouTube video:
HC-SR04 Ultrasonic Wiring Diagram Setup Argon 1:







_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.