The original idea - an autonomous drone for indoor use - could not be implemented in the available time frame even after a lot of effort, so the application was redefined: The drone is used as a flying "information hub" in order to get information about the fire from another perspective.
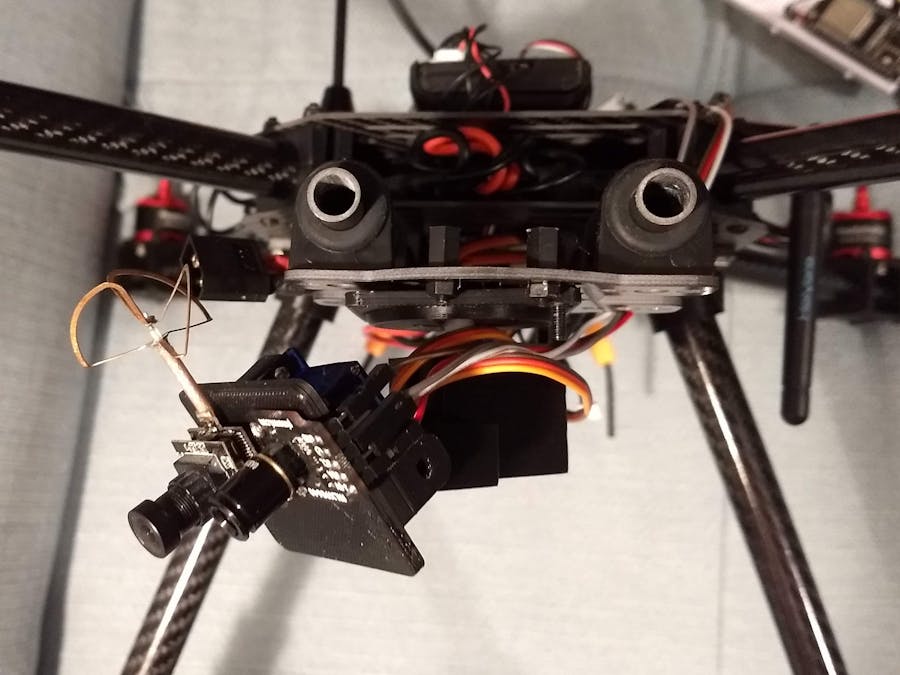
The main function of the drone is a camera system with an FPV and thermal imaging camera.
In the course of the project, a fellow student (Markus Brutzer) joined me and we worked on the project together. However, we made a miscalculation in the time we have. Since we are now in the last semester and have to deal with topics such as Bachelor's thesis, there is less time for the challenge than expected. Therefore, we cannot present a ready-made solution, but rather an approach.
Further information (exact procedure, problems and challenges, conclusion and outlook) can be found in the attached documentation.
Since we are both from Germany, English is not our native language. We ask for forgiveness :)









Comments
Please log in or sign up to comment.