


Hardware components | ||||||
| × | 1 | ||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
Use Arduino to control the DC motor speed regulator MST_K12.
The benefits of interfacing MST_K12 with Arduino are:
- Software control by entering commands via the serial monitor
- Adjust the speed level with the ability to set a time profiles
- Switching on and off the motor
- Storage of the adjusted regulation level
- Remote control (not using the potentiometer)
- Ability to manage the operation time/off for particular applications
MST_K12 & Arduino
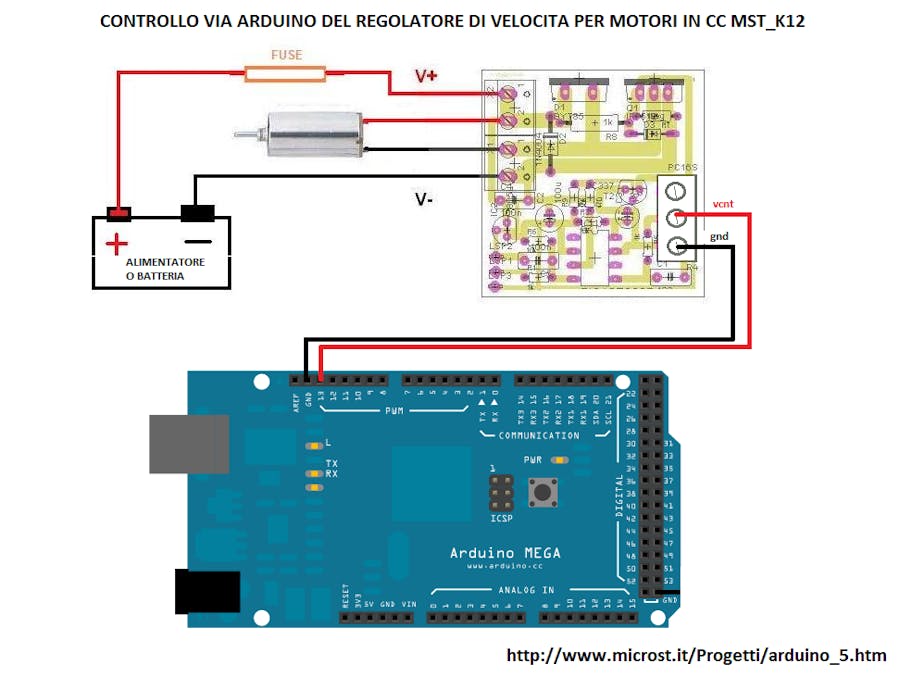
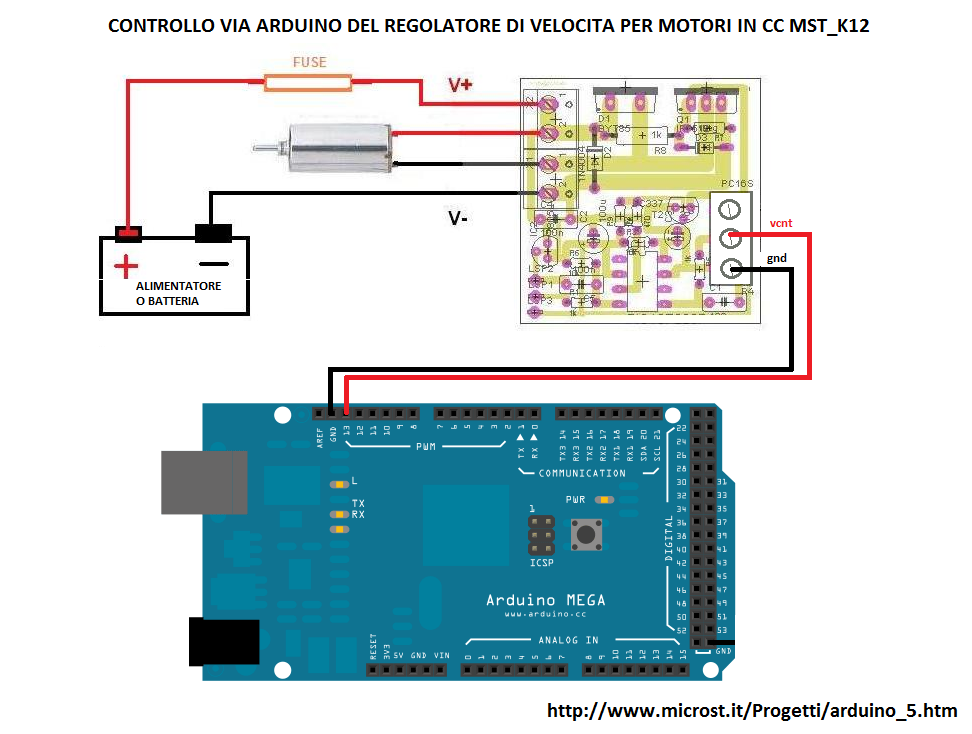
The hardware implementation is performed using the Arduino MEGA 2560 card and the MST_K12 regulator without the potenziometerreplaced by a screw connector: It is needed to connect the positive input VCNT to the pin 13 pf the arduino card and the negative input pin GND to the gnd of the card as shown in the figure.
The principle of the control is very simple: in normal operation the MST_K12 takes the voltage, set by potentiometer, to control of the regulation value. To replace the potentiometer it is needed something that can generate a variable voltage from 0 to 5V into 256 levels. There comes to the aid of the PWM Arduino that has the ability to generate a PWM signal, via command, for some pin (2-13) with a value that ranges from 0% to 100%. As described in the tutorial on the use of the PWM it is possible to generate a DC voltage by a PWM signal. The value of this voltage that call VCNT = D / 100 VDC. where D is the duty cycle in% and VCC is the maximum voltage of the PWM signal. In our case, for the Arduino, VCC = 5V that is compatible with the internal operation of the MST_K12 voltage while D may vary from 0% to 100%. For example, if you want a 50% speed regulation enough to set the duty cycle of the pin 13 to 50% because at this corresponds to a voltage VCNT = 5 * 50/100 = 2.5V which is for the MST_K12 the voltage value for 50% of control level. To switch off the controller just put the duty cycle to zero while to turn it on just put the duty cycle of the pin 13 to the previous value or a new value different from zero.
The principle of the control is very simple: in normal operation the MST_K12 takes the voltage, set by potentiometer, to control of the regulation value. To replace the potentiometer it is needed something that can generate a variable voltage from 0 to 5V into 256 levels. There comes to the aid of the PWM Arduino that has the ability to generate a PWM signal, via command, for some pin (2-13) with a value that ranges from 0% to 100%. As described in the tutorial on the use of the PWM it is possible to generate a DC voltage by a PWM signal. The value of this voltage that call VCNT = D / 100 VDC. where D is the duty cycle in% and VCC is the maximum voltage of the PWM signal. In our case, for the Arduino, VCC = 5V that is compatible with the internal operation of the MST_K12 voltage while D may vary from 0% to 100%. For example, if you want a 50% speed regulation enough to set the duty cycle of the pin 13 to 50% because at this corresponds to a voltage VCNT = 5 * 50/100 = 2.5V which is for the MST_K12 the voltage value for 50% of control level. To switch off the controller just put the duty cycle to zero while to turn it on just put the duty cycle of the pin 13 to the previous value or a new value different from zero.

{kind=link}
Comments
Please log in or sign up to comment.