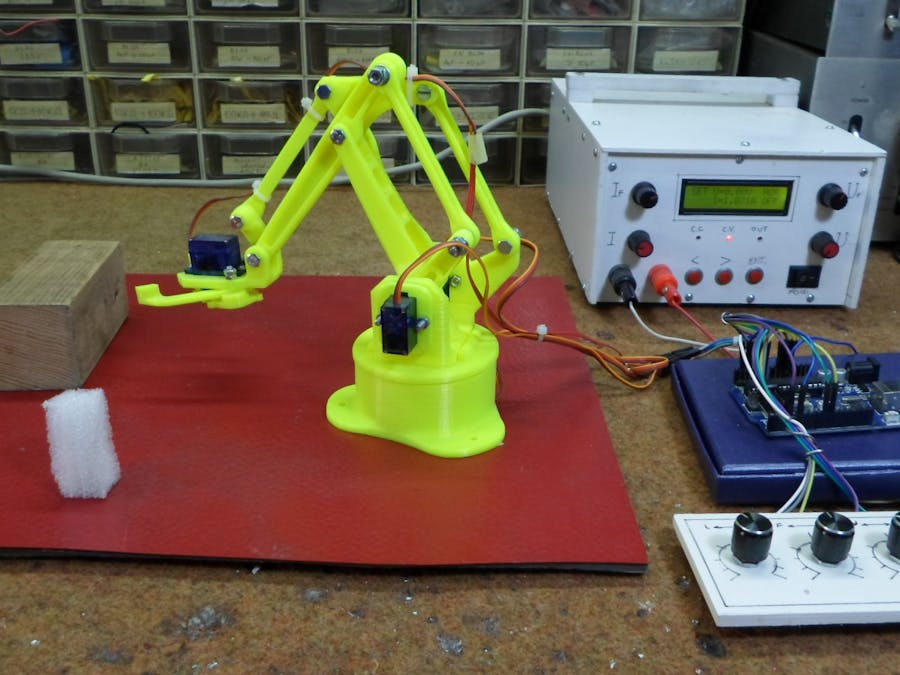
This is the second version of my 3D printed robotic arm wich is now capable to performs a pre-recorded task many times like a real industrial machine. It contains 4pcs. cheap SG 90 servo motors that are powered by the Arduino board. You can download.stl files for 3D printing from the link given below, or directly to Thingiverse web :
https://www.thingiverse.com/thing:1015238.
This time I slightly modified the Aswinth Raj code to fit 4 servo motors instead of 5. After we upload the code to the Arduino board, first we need to start Arduino serial monitor and press "R" + Enter to record some job. Now we do the job with the help of potentiometers. Next on the serial monitor we need to press "P" + Enter to execute pre-reloaded job. This job can be performed many times as we require it.
You can find more details on the hardware part of this project on my earlier video ( https://www.youtube.com/watch?v=BRxmZlixiKE&t=79s ) where it is also provided with a simple code that you can move the robot arm only with the help of potentiometers.



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








{kind=link}
Comments
Please log in or sign up to comment.