


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 3 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
This time I will show you how to make an Arduino-powered Tic-Tac-Toe robot, which will provide you an excellent game experience.
-----------------------------------------------------------------------------------
Visit my sponsor PCBgogo for all your PCB needs, 10% OFF NOW!
https://www.pcbgogo.com/promo/from_MirkoPavleskiMK
------------------------------------------------------------------------------------
The game is played on a small whiteboard that is covered with transparent packing tape that will make it very easy to erase the board between games. For better visual effect, communication with the robot is done through a small TFT color screen.
This is an Open Source project called "TICO – Tic-Tac-Toe Arduino Robot" and detailed documentation can be found on the author's website:
https://playrobotics.com/blog/tico-tic-tac-toe-arduino-robot-documentation/
If you decide to make it yourself, share your questions and join the conversation on the Tico Facebook group:
https://www.facebook.com/groups/890278848555627
And on Thingiverse:
https://www.thingiverse.com/thing:4946788
Unlike the original design, I made the mechanical part from a PVC board with a thickness of 3 mm which I processed with a scalpel.
In fact, I made this part for one of my previous videos that described a project called "Plotlock", when I still did not have a 3D Printer. The initial design of Tico was inspired by this Plotclock project, and Parts of the Plot clock’s code is used in Tico’s code. Of course, it is much better and easier to make if you have a 3D Printer, and.stl files are given on the page.
The game starts when the robot clears the board first, then draws the frame and marks the first move. After that, the human player marks his move on the board, and also on the remote controller, or on the Arduino serial monitor depending on the settings in the code. When someone wins, the robot marks it on the board and on the screen with a message.
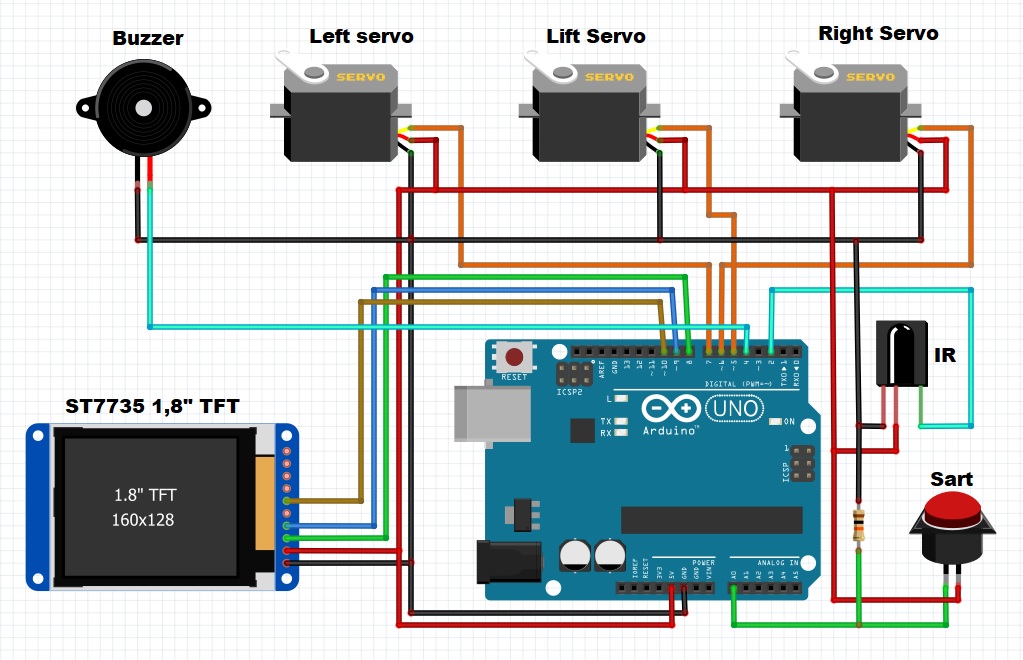
The electronic part of the device is very simple to build and consists of several components:
- Arduino Uno microcontroller
- Three cheap 9 grams servo motors
- 1.8 inch TFT color display
- Buzzer
-button
- and Ifra Red receiver.
We will first show the case when we enter our moves through the Arduino serial monitor. To do this, we need to modify the next line of code:
#define SERIAL_MONITOR_MODE true
The robot can also mark our moves. It is given through the section:
#define DRAW_HUMAN_MOVE true
If we want to enter our moves with Remote Controller we need to make the following code modification:
#define SERIAL_MONITOR_MODE false
To find out the codes specifically for your remote controller, I made a small program that you can also download at the link provided.
As you can see in the video the Robot can not boast of any great Intelligence, but this is an Open Project and I hope that in the future that part will be improved.
//****************************************************************//
// Tico - Tic-Tac-Toe playing robot
// Tico is an open source 3D printed robot designed by PlayRobotics
// Tico was designed in order to inspire kids to learn coding while teaching Tico to play Tic-Tac-Toe
// Full documentation can be found here: https://playrobotics.com/blog/tico-tic-tac-toe-arduino-robot-documentation
// Attribution: Parts of this code are based on the popular Plotclock by Joo (https://www.thingiverse.com/thing:248009)
//****************************************************************//
//Should playro draw the move made by the human, or the human will draw it himself?
#define DRAW_HUMAN_MOVE false
//If you don't have a remote control or IR receiver you can enable serial monitor instead
//When using serial monitor please choose 'No line ending' from the dropdown next to the boundrate instead of 'new line'
#define SERIAL_MONITOR_MODE true
// Include libraries
#include <Wire.h>
#include <Servo.h>
#include <IRremote.h>
#include <Adafruit_GFX.h> // Core graphics library
#include <Adafruit_ST7735.h> // Hardware-specific library for ST7735
#include <SPI.h>
// Servo pins
const int LEFT_SERVO_PIN = 7;
const int RIGHT_SERVO_PIN = 6;
const int LIFT_SERO_PIN = 5;
Servo servo_lift;
Servo servo_left;
Servo servo_right;
//LCD Pins
#define TFT_CS 10
#define TFT_RST 8 // Or set to -1 and connect to Arduino RESET pin
#define TFT_DC 9
Adafruit_ST7735 tft = Adafruit_ST7735(TFT_CS, TFT_DC, TFT_RST);
// Lift servo calibration
// *** If the pen is not touching the board, this is the value you should play with ***
const int Z_OFFSET = 395; // Lower value will lift the pen higher
//*** Other servo configurations, usually you will not need to touch those
int servoLift = 1500;
const int LIFT0 = 1110 + Z_OFFSET; // On drawing surface
const int LIFT1 = 925 + Z_OFFSET; // Between numbers
const int LIFT2 = 735 + Z_OFFSET; // Going towards sweeper
const int LIFT_SPEED = 1000; // Speed of liftimg arm, lower number will increase speed.
// Side servos calibration
const int SERVO_LEFT_FACTOR = 690;
const int SERVO_RIGHT_FACTOR = 690;
// Zero-position
const int SERVO_LEFT_NULL = 1950;
const int SERVO_RIGHT_NULL = 815;
// Length of arms
const float L1 = 35;
const float L2 = 55.1;
const float L3 = 13.2;
const float L4 = 45;
// Origin points of left and right servos.
const int O1X = 24;
const int O1Y = -25;
const int O2X = 49;
const int O2Y = -25;
// Home coordinates, where the eraser is.
const volatile double ERASER_X = -11;
const volatile double ERASER_Y = 45.5;
volatile double lastX = ERASER_X; // 75;
volatile double lastY = ERASER_Y; // 47.5;
//We will be using an array that will hold the current state of all our game cells
// -1-> Empty cell
// 0 -> 0
// 1 -> X
int board_values[] = { -1, -1, -1, -1, -1, -1, -1, -1, -1};
int empty_places = 9;
int winner = -1;
void setup()
{
Serial.begin(9600);
//LCD Setup and clear
tft.initR(INITR_BLACKTAB);
tft.fillScreen(ST77XX_BLACK);
//Play sound on start
tone(4,3000,250);
delay(250);
tone(4,400,250);
delay(250);
tone(4,3000,250);
delay(250);
//Draw blinking eyes animation
tft.fillCircle(30, 50, 25, ST77XX_BLUE);
tft.fillCircle(95, 50, 25, ST77XX_BLUE);
delay(500);
tft.fillCircle(30, 50, 15, ST77XX_BLACK);
tft.fillCircle(95, 50, 15, ST77XX_BLACK);
delay(500);
tft.fillCircle(30, 50, 15, ST77XX_BLUE);
//tft.fillCircle(95, 50, 15, ST77XX_BLUE);
delay(250);
tft.fillCircle(30, 50, 15, ST77XX_BLACK);
//tft.fillCircle(95, 50, 15, ST77XX_BLACK);
delay(250);
//tft.fillCircle(30, 50, 25, ST77XX_BLUE);
tft.fillCircle(95, 50, 25, ST77XX_BLUE);
delay(250);
//tft.fillCircle(30, 50, 15, ST77XX_BLACK);
tft.fillCircle(95, 50, 15, ST77XX_BLACK);
delay(250);
tft.fillCircle(30, 50, 15, ST77XX_BLUE);
tft.fillCircle(95, 50, 15, ST77XX_BLUE);
delay(250);
tft.fillCircle(30, 50, 15, ST77XX_BLACK);
tft.fillCircle(95, 50, 15, ST77XX_BLACK);
delay(1000);
tft.setCursor(0, 0);
tft.setTextColor(ST77XX_WHITE);
tft.setTextSize(2);
tft.setTextWrap(true);
tft.setCursor(30, 90);
tft.setTextColor(ST77XX_BLUE );
tft.setTextSize(3);
tft.print("I'M");
tft.setCursor(30, 120);
tft.print("TICO");
//Play sound when LCD says "I'M Tico"
tone(4,400,250);
delay(250);
tone(4,3000,250);
delay(250);
delay(500);
//Setup IR reciver on Pin 2
IrReceiver.begin(2);
//This is needed because we want different random number every time Arduino is reastrted
randomSeed(analogRead(A2));
pinMode(4, OUTPUT);
pinMode(A0, INPUT_PULLUP);
}
void loop()
{
// Draw "Click Start" message
tft.setCursor(30, 100);
tft.fillRect(0,90,130,100,ST77XX_BLACK);
tft.setTextColor(ST77XX_YELLOW );
tft.setCursor(20, 90);
tft.print("Click");
tft.setCursor(20, 120);
tft.print("Start");
tone(4,3000,250);
delay(250);
//The loop will run over and over again until the game is started
//The game can be started using a button or serial monitor if you don't have a button
//SERIAL-MONITOR-MODE setting can be changed in the begning of this code
if (SERIAL_MONITOR_MODE)
{
//Serial monitor start
//Print main menu
Serial.println("--==MAIN MENU==--");
Serial.println("==S== Start Game");
Serial.println("==E== Erase");
Serial.println("==F== Draw Frame");
Serial.println("==H== Go Home");
//We just wait until there is an input
while (Serial.available() == 0) {}
//Get the value user entered
int user_input = Serial.read();
//Ignore the hidden line end character the monitor is adding to the received character
if(user_input != '\n')
{
//React to user input
if ((user_input!='S')&&(user_input!='E')&&(user_input!='F')&&(user_input!='H')&&(user_input!='s')&&(user_input!='e')&&(user_input!='f')&&(user_input!='h'))
Serial.println("====WRONG INPUT====");
else
{
if ((user_input=='H')||(user_input=='h'))
goHome();
else
{
if ((user_input=='E')||(user_input=='e'))
{
erase();
//goHome();
}
else
{
if ((user_input=='F')||(user_input=='f'))
drawFrame();
else
startGame();
}
}
}
}
}
else
{
//Button start
//The following loop will just continue until the button is pressed
int button_value = analogRead(A0);
while(button_value<500)
{
delay(20);
//If you are using a regular button it will also require a pull up resistor
//Alternatively you can use an "Arduino button moudle" that already has a built in resistor
//Another option will be to use Arduin's built in pull-up resistor
button_value = analogRead(A0);
}
startGame();
}
//Reset game variables before next game
//Winner can be: 0 , 1(X) or 2(tie)
winner = -1;
empty_places = 9;
//This array holds all the moves
// 1->empty 0->0 1->X
//Going over it to make it empty
for (int i = 0; i < 9; i++)
board_values[i] = -1;
}
void startGame()
{
Serial.println("====GAME IS ON====");
tone(4,3000,250);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("GAME");
tft.setCursor(20, 115);
tft.print("=IS=");
tft.setCursor(20, 140);
tft.print("=ON= ");
delay(500);
Serial.println("Erasing");
erase();
Serial.println("Drawing Frame");
drawFrame();
delay(1000);
Serial.println("Tico is making the first move");
drawMove(5);
recordMove(5);
//As long as the game is runing we need to repeate this loop
while ((winner == -1) && (empty_places > 0))
{
Serial.println("Human, enter your move(1-9)");
tft.setTextColor(ST77XX_RED);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("YOUR");
tft.setCursor(20, 115);
tft.print("MOVE");
int moveTo;
tft.fillCircle(30, 50, 15, ST77XX_RED);
tft.fillCircle(95, 50, 15, ST77XX_BLACK);
//This mode can be used to get input from user via monitor instead of remote control
//You can change this setting at the beggining of this code
if (SERIAL_MONITOR_MODE)
{
//Serial monitor mode
//This loop will just wait until there is an input
while (Serial.available() == 0) {}
moveTo = Serial.readString().toInt(); //Reading the Input string and turning it to integer
}
else
{
//IR mode
IrReceiver.enableIRIn();
delay(100);
int code_received = false;
while (!code_received)
{
detachServos();
if (IrReceiver.decode())
{
// Print a short summary of received data
IrReceiver.printIRResultShort(&Serial);
//Mapping of codes sent by the remote control we are using,
//if you are using a different remote control you will need to re-map this
//0x4 ->1
//0x5 ->2
//0x6 ->3
//0x8 ->4
//0x9 ->5
//0xA ->6
//0xC ->7
//0xD ->8
//0xE ->9
IrReceiver.resume(); // Enable receiving of the next value
int message_rec = IrReceiver.decodedIRData.command;
if ((message_rec == 0xC) || (message_rec == 0x18) || (message_rec == 0x5E)
|| (message_rec == 0x8) || (message_rec == 0x1C) || (message_rec == 0x5A)
|| (message_rec == 0x42) || (message_rec == 0x52) || (message_rec == 0x4A))
{
code_received = true;
IrReceiver.disableIRIn();
if (message_rec == 0xC)
moveTo = 1;
if (message_rec == 0x18)
moveTo = 2;
if (message_rec == 0x5E)
moveTo = 3;
if (message_rec == 0x8)
moveTo = 4;
if (message_rec == 0x1C)
moveTo = 5;
if (message_rec == 0x5A)
moveTo = 6;
if (message_rec == 0x42)
moveTo = 7;
if (message_rec == 0x52)
moveTo = 8;
if (message_rec == 0x4A)
moveTo = 9;
}
}
delay(30);
}
}
//***Regardless of the mode that was used(serial / IR)
//we now have the user's move in moveTo variable
//Check if the move value is valid
if ((moveTo > 0) && (moveTo < 10))
{
//Check if this place is still empty
if (board_values[moveTo - 1] == -1)
{
Serial.print("Moving to: ");
Serial.println(moveTo);
//Only draw the move made by the user if this setting is activated
if (DRAW_HUMAN_MOVE)
drawMove(moveTo + 10);
//Even if Tico didn't draw the move he should document it anyway
recordMove(moveTo + 10);
checkWinnerRow (1, 0);
checkWinnerRow (2, 0);
checkWinnerRow (3, 0);
checkWinnerCol (1, 0);
checkWinnerCol (2, 0);
checkWinnerCol (3, 0);
checkWinnerDiag (1, 0);
checkWinnerDiag (2, 0);
if ((winner == -1) && (empty_places > 0))
{
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
tft.setTextColor(ST77XX_WHITE);
//Print
tft.setCursor(20, 90);
tft.print("TICO");
tft.setCursor(20, 115);
tft.print("MOVE");
tft.fillCircle(30, 50, 15, ST77XX_BLACK);
tft.fillCircle(95, 50, 15, ST77XX_YELLOW);
replyMove();
}
checkWinnerRow (1, 1);
checkWinnerRow (2, 1);
checkWinnerRow (3, 1);
checkWinnerCol (1, 1);
checkWinnerCol (2, 1);
checkWinnerCol (3, 1);
checkWinnerDiag (1, 1);
checkWinnerDiag (2, 1);
}
else
{
Serial.println("Already taken!!");
//IrReceiver.disableIRIn();
//delay(100);
tft.setTextColor(ST77XX_RED);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("PLACE");
tft.setCursor(20, 115);
tft.print("TAKEN");
tone(4, 1000, 250);
delay(250);
}
}//End if -> Check if the move value is valid
}//End if -> Check if this place is still empty
goHome();
}
void checkWinnerCol (int col, int player) {
//Row
if ((board_values[(col - 1) * 3] == player) && (board_values[(col - 1) * 3 + 1] == player) && (board_values[(col - 1) * 3 + 2] == player))
{
attachServos();
Serial.println("--== Winner COL==--");
Serial.println(player);
if (player==0){
//tft.print("==YOU====WIN==");
tft.setTextColor(ST77XX_RED);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("=YOU=");
tft.setCursor(20, 115);
tft.print("=WIN=");
}
else
{
//tft.print("==TICO===WINS==");
tft.setTextColor(ST77XX_BLUE);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("TICO");
tft.setCursor(20, 115);
tft.print("WINS!");
}
drawTo(55 - 20 * (4 - col - 1), 10);
//Draw
lift(LIFT0);
drawTo(55 - 20 * (4 - col - 1), 50);
lift(LIFT2);
winner = player;
}
}
void checkWinnerRow (int row, int player) {
//Row
if ((board_values[row - 1] == player) && (board_values[row + 3 - 1] == player) && (board_values[row + 6 - 1] == player))
{
attachServos();
Serial.println("--== Winner ROW==--");
Serial.println(player);
tft.setTextColor(ST77XX_RED);
tft.setCursor(0, 20);
if (player==0){
//tft.print("==YOU====WIN==");
tft.setTextColor(ST77XX_RED);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("=YOU=");
tft.setCursor(20, 115);
tft.print("=WIN=");
}
else
{
//tft.print("==TICO===WINS==");
tft.setTextColor(ST77XX_BLUE);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("TICO");
tft.setCursor(20, 115);
tft.print("WINS!");
}
drawTo(10, 43 - 14 * (row - 1));
//Draw
lift(LIFT0);
drawTo(60, 43 - 14 * (row - 1));
lift(LIFT2);
winner = player;
}
}
void checkWinnerDiag (int diag, int player) {
attachServos();
//Check which diagonal
if (diag == 1)
{
if ((board_values[1 - 1] == player) && (board_values[5 - 1] == player) && (board_values[9 - 1] == player))
{
Serial.println("--== Winner DIAGONAL 1==--");
Serial.println(player);
tft.setTextColor(ST77XX_RED);
tft.setCursor(0, 20);
if (player==0){
//tft.print("==YOU====WIN==");
tft.setTextColor(ST77XX_RED);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("=YOU=");
tft.setCursor(20, 115);
tft.print("=WIN=");
}
else
{
//tft.print("==TICO===WIN==");
tft.setTextColor(ST77XX_BLUE);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("TICO");
tft.setCursor(20, 115);
tft.print("WINS!");
}
drawTo(60, 10);
//Draw
lift(LIFT0);
drawTo(15, 45);
lift(LIFT2);
winner = player;
}
}
else
{
if ((board_values[7 - 1] == player) && (board_values[5 - 1] == player) && (board_values[3 - 1] == player))
{
Serial.println("--== Winner DIAGONAL 2==--");
Serial.println(player);
tft.setTextColor(ST77XX_RED);
tft.setCursor(0, 20);
if (player==0){
//tft.print("==YOU====WIN==");
tft.setTextColor(ST77XX_RED);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("=YOU=");
tft.setCursor(20, 115);
tft.print("=WIN=");
}
else
{
//tft.print("==TICO===WIN==");
tft.setTextColor(ST77XX_BLUE);
//Clean text area
tft.fillRect(0,90,130,100,ST77XX_BLACK);
//Print
tft.setCursor(20, 90);
tft.print("TICO");
tft.setCursor(20, 115);
tft.print("WINS!");
}
drawTo(10, 10);
//Draw
lift(LIFT0);
drawTo(60, 50);
lift(LIFT2);
winner = player;
// or draw the line from other side
/*
drawTo(60, 45);
//Draw
lift(LIFT0);
drawTo(15, 10);
lift(LIFT2);
*/
}
}
}
void replyMove() {
//========= Reply move ======
//We will generate a random number from 1 to the number of empty places
//We will then go over the array and count the empty places we meet until we get to the needed place
//If there are 3 empty places and the trandom number will be 2 , this means we will make a move at the second empty place we find
int randEmptyPlace = random(empty_places) + 1;
//Debugging
/*
Serial.println("============================");
Serial.print("Empty Spaces:");
Serial.println(empty_places);
Serial.print("Replying to randEmptyPlace: ");
Serial.println(randEmptyPlace);
Serial.println("============================");
*/
//Loop until we find an empty place
int emptyPlacesFound = 0;
for (int i = 0; i < 9; i++)
{
if (board_values[i] == -1)
{
//We found an empty place
emptyPlacesFound++;
if (emptyPlacesFound == randEmptyPlace)
{
drawMove(i + 1);
recordMove(i + 1);
Serial.print("Replying to: ");
Serial.println(i + 1);
}
}
}
}
void recordMove(int move)
{
if ((move >= 1) && (move <= 9))
{
board_values[move - 1] = 1;
empty_places--;
}
if ((move >= 11) && (move <= 19))
{
board_values[move - 11] = 0;
empty_places--;
}
}
void drawMove(int move)
{
attachServos();
switch (move) {
case 0:
drawFrame();
break;
case 1:
drawX(15, 40);
break;
case 2:
drawX(15, 25);
break;
case 3:
drawX(15, 10);
break;
case 4:
drawX(30, 40);
break;
case 5:
drawX(30, 25);
break;
case 6:
drawX(30, 15);
break;
case 7:
drawX(50, 40);
break;
case 8:
drawX(50, 25);
break;
case 9:
drawX(50, 10);
break;
case 11:
drawZero(15, 40);
break;
case 12:
drawZero(15, 25);
break;
case 13:
drawZero(15, 10);
break;
case 14:
drawZero(30, 40);
break;
case 15:
drawZero(30, 25);
break;
case 16:
drawZero(30, 10);
break;
case 17:
drawZero(50, 40);
break;
case 18:
drawZero(50, 25);
break;
case 19:
drawZero(50, 10);
break;
case 99:
drawTo(5, 0);
break;
}
//Get out of the way
lift(LIFT2);
drawTo(10, 10);
detachServos();
}
void erase() {
goHome();
attachServos();
lift(LIFT0); // Go down, just before doing the erase movements.
drawTo(70, ERASER_Y);
drawTo(5, ERASER_Y);
drawTo(70, 34);
drawTo(0, 34);
drawTo(70, 34);
drawTo(0, 26);
drawTo(70, 20);
drawTo(0, 20);
drawTo(70, 5);
drawTo(10, 15);
drawTo(40, 30);
drawTo(ERASER_X, ERASER_Y);
lift(LIFT2 - 100);
detachServos();
}
void drawX(float bx, float by) {
bx = bx - 1;
by = by + 1;
//Go
drawTo(bx, by+1);
//Draw
lift(LIFT0);
drawTo(bx + 10, by + 10);
//=====
//Go
lift(LIFT2);
drawTo(bx + 10, by);
//Draw
lift(LIFT0);
drawTo(bx, by + 10);
lift(LIFT1);
}
void drawZero(float bx, float by) {
drawTo(bx + 6, by + 3);
lift(LIFT0);
bogenGZS(bx + 3.5, by + 5, 5, -0.8, 6.7, 0.5);
lift(LIFT1);
}
void lift(int lift) {
if (servoLift >= lift) {
while (servoLift >= lift) {
servoLift--;
servo_lift.writeMicroseconds(servoLift);
delayMicroseconds(LIFT_SPEED);
}
}
else {
while (servoLift <= lift) {
servoLift++;
servo_lift.writeMicroseconds(servoLift);
delayMicroseconds(LIFT_SPEED);
}
}
}
void bogenUZS(float bx, float by, float radius, int start, int ende, float sqee) {
float inkr = -0.05;
float count = 0;
do {
drawTo(sqee * radius * cos(start + count) + bx,
radius * sin(start + count) + by);
count += inkr;
}
while ((start + count) > ende);
}
void bogenGZS(float bx, float by, float radius, int start, int ende, float sqee) {
float inkr = 0.05;
float count = 0;
do {
drawTo(sqee * radius * cos(start + count) + bx,
radius * sin(start + count) + by);
count += inkr;
}
while ((start + count) <= ende);
}
void drawTo(double pX, double pY) {
double dx, dy, c;
int i;
// dx dy of new point
dx = pX - lastX;
dy = pY - lastY;
//path lenght in mm, times 4 equals 4 steps per mm
c = floor(7 * sqrt(dx * dx + dy * dy));
if (c < 1) c = 1;
for (i = 0; i <= c; i++) {
// draw line point by point
set_XY(lastX + (i * dx / c), lastY + (i * dy / c));
}
lastX = pX;
lastY = pY;
}
double return_angle(double a, double b, double c) {
// cosine rule for angle between c and a
return acos((a * a + c * c - b * b) / (2 * a * c));
}
void set_XY(double Tx, double Ty) {
delay(1);
double dx, dy, c, a1, a2, Hx, Hy;
// calculate triangle between pen, servoLeft and arm joint
// cartesian dx/dy
dx = Tx - O1X;
dy = Ty - O1Y;
// polar lemgth (c) and angle (a1)
c = sqrt(dx * dx + dy * dy); //
a1 = atan2(dy, dx); //
a2 = return_angle(L1, L2, c);
//Serial.print("servo_left:");
//Serial.println(empty_places);
servo_left.writeMicroseconds(floor(((a2 + a1 - M_PI) * SERVO_LEFT_FACTOR) + SERVO_LEFT_NULL));
// calculate joinr arm point for triangle of the right servo arm
a2 = return_angle(L2, L1, c);
Hx = Tx + L3 * cos((a1 - a2 + 0.621) + M_PI); //36,5°
Hy = Ty + L3 * sin((a1 - a2 + 0.621) + M_PI);
// calculate triangle between pen joint, servoRight and arm joint
dx = Hx - O2X;
dy = Hy - O2Y;
c = sqrt(dx * dx + dy * dy);
a1 = atan2(dy, dx);
a2 = return_angle(L1, L4, c);
//Serial.print("servo_right:");
//Serial.println(floor(((a1 - a2) * SERVO_RIGHT_FACTOR) + SERVO_RIGHT_NULL));
servo_right.writeMicroseconds(floor(((a1 - a2) * SERVO_RIGHT_FACTOR) + SERVO_RIGHT_NULL));
}
void drawFrame() {
attachServos();
lift(LIFT2);
//===VERTICAL
//Go
drawTo(30, 10);
delay(500);
//Draw
lift(LIFT0);
drawTo(25, 50);
lift(LIFT2);
//Go
drawTo(47, 10);
delay(500);
//Draw
lift(LIFT0);
drawTo(45, 50);
lift(LIFT2);
//===HORIZONTAL
//Go
drawTo(10, 23);
//Draw
lift(LIFT0);
drawTo(60, 23);
lift(LIFT2);
//Go
drawTo(10, 35);
//Draw
lift(LIFT0);
drawTo(60, 35);
lift(LIFT2);
detachServos();
}
void goHome() {
//initial servo location
servo_lift.writeMicroseconds(800);
servo_left.writeMicroseconds(1633);
servo_right.writeMicroseconds(2289);
servo_lift.attach(LIFT_SERO_PIN);
servo_left.attach(LEFT_SERVO_PIN);
servo_right.attach(RIGHT_SERVO_PIN);
lift(LIFT2 - 100); // Lift all the way up.
drawTo(ERASER_X, ERASER_Y);
lift(LIFT0);
delay(500);
//lift(LIFT2);
detachServos();
}
void detachServos() {
servo_lift.detach();
servo_left.detach();
servo_right.detach();
}
void attachServos() {
servo_lift.attach(LIFT_SERO_PIN);
servo_left.attach(LEFT_SERVO_PIN);
servo_right.attach(RIGHT_SERVO_PIN);
}
#include <IRremote.h>
void setup()
{
Serial.begin(9600);
IrReceiver.begin(2);
}
void loop()
{
IrReceiver.enableIRIn();
delay(100);
int code_received = false;
while (!code_received)
{
if (IrReceiver.decode())
IrReceiver.printIRResultShort(&Serial);
IrReceiver.resume();
int message_rec = IrReceiver.decodedIRData.command;
delay(30);
}
}




{kind=link}
Comments
Please log in or sign up to comment.