




Hardware components | ||||||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Are you brave enough to take a leap?
As a skydiving instructor measuring the speed of a parachute has been a guessing game until now. As an instructor teaching a new student about parachute piloting, or as a licensed skydiver curious about just how fast you can go, the Para-speedo is an important new tool. Once the parachute is deployed, and flying properly the danger is not over. In fact the majority of incidents that occur in skydiving happen under a fully functioning parachute. These incidents can me mitigated by measuring the speed of a parachute. Some of these incidents happen because of students not being able to manage high wind scenarios, and not being able to pilot the canopy back to the landing area. Depending on the wind speed and heading a parachute may not be able to move in a horizontal manner into the wind direction. If the student can not make it back to the proper landing area, then landing in an alternate area may cause issues. The Para-speedo will allow instructors to measure the parachute speed, and calculate the ability of a parachute to deal with high winds. Also, for experienced jumpers, buying a small sport parachute that goes really fast is fun! Until now there hasn't been a way to see exactly how fast your parachute is flying.
To measure parachute speed a GPS unit designed for racing drones was integrated with a photon which converted the output to a usable speed. GPS speed was used because a parachute is flying through 3-D space. Having a horizontal and vertical speed would work, but the GPS unit sends this information as a 3-D speed already.
The GPS unit is a SE 100 model from Radiolink with a Ublox M8N (with u-blox UBX-M8030(M8)) engine, and a geomagnetic HMC5983 from Honeywell. The Ublox M8N unit ouputs a GNSS signal and must be changed to be compatible with the Tiny GPS++ library.
All components were put into a container to protect them in freefall, and then placed in a pouch that connects to the harness of my parachute rig.
The code written has five declared variables that can be viewed on Mobicle.io. As long as the photon has a wifi signal you can view and change these variables in real time. Each variable represents a certain metric.
"gpssats" shows how many satellites are currently connected the the GPS unit.
"gpsfreq" represents the ouput signal frequency of the GPS which must be converted to mph, ~ 2.279 Hz is equivalent to 1 mph.
"gpscal" is a calibration variable can be changed if using a different GPS unit.
"gpsmph" shows the current speed as long as a wifi connection is established.
Also the "gpsmph" variable is set to publish on console.io every second, as well as an RSSI signal every 30 seconds. To keep a wifi connection my cell phone was used as a hotspot, and carefully placed in my skydiving suit. Another Photon is subscribed to this publication, and flashes an LED to let the user on the ground know the GPS photon is publishing. This same photon then publishes an event that the GPS photon is subscribed to, and flashes an LED on pin D5 to let the user know both photons are in communication with each other..
Four different speeds were measured during the jump. Each speed represents a different flight characteristic of my parachute, all of which are shown in the attached Youtube video. The two lowest speed represents a " full flare", the next slowest speed represents "half brakes". The two faster speeds represent a full spiraling turn, and a maneuver called a "swoop". A full flare is a maneuver that a pilot does while landing to arrest the forward and vertical speed. To complete a flare both toggles are pulled all the way down. A flare can also be used to arrest the speed in full flight to avoid other parachutes, or to allow more time to deal with issues that may arise. Half-brakes, are a maneuver done by pulling both toggles down half way, that can allow a pilot to accurately land in a small landing area if not able to make it back to the designated one, and also allow the pilot to slow down and create separation from other parachutes.
A full spiral turn is done by pulling one toggle all the way down and holding it, and it is just plain fun. If held long enough the speed can increase very quickly. Finally a "Swoop" is a maneuver that is done immediately prior to landing that points the leading edge of the parachute towards the ground increasing the speed very quickly. When released the parachute attempts to level out right before the ground, and allows the pilot to slide across the ground. Sounds scary, but it is awesome. Below is an example of a "swoop"
For this project one of the requirements were to have data published in real time and put into a graph. This was completed by using IFTTT. If the GPS photon publishes speed then IFTTT sends this information to a Google Doc and graphs it versus time as I am flying the parachute. Below is a graph of one of my test jumps, which shows my velocity versus time.
A problem arose during one of the test jumps, and it was found that IFTTT struggled to keep up with the publish time intervals. I re-flashed the code for publishing once every 7 seconds, and IFTTT did give me a graph that matched up with the speeds posted one console.io. The peak at the far left is the speed traveled white still in the airplane. After leaving the plane my parachute was opened immediately, and began flying in "full flight. This is where the graph dips down to approximately 30 mph. Then the parachute was put into half-brakes, and this is where the speed drops down to 22-24 mph. Then the parachute was put into full brakes, and this is where the greatest dip is in the graph at 15-16 mph. Then a full spiral turn was done, and I got one spike up to 41 mph. Then the last spike is the maximum speed of my "swoop" which was recorded at 45 mph.
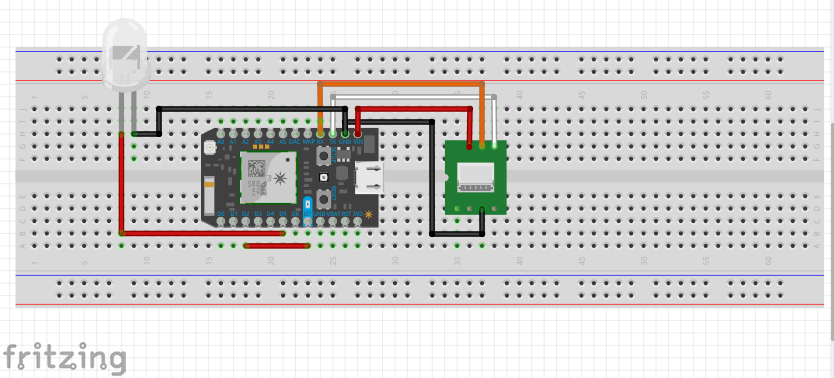
Another one of the requirements for this project was to have the two photons communicate information to each other in real time. There was an issue that arose during the first test jump. As the plane reached approximately 4,000 feet the hot spot went in and out of signal. To try and mitigate this issue the second photon was coded to light the LED on pin D7 when the GPS photon is publishing speed in console.io. In turn, when the non GPS photon flashes this LED on D7, it publishes that it is connected, and an LED on the GPS photon flashes on pin D5 pictured below









{kind=link}
Comments
Please log in or sign up to comment.