


Hardware components | ||||||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
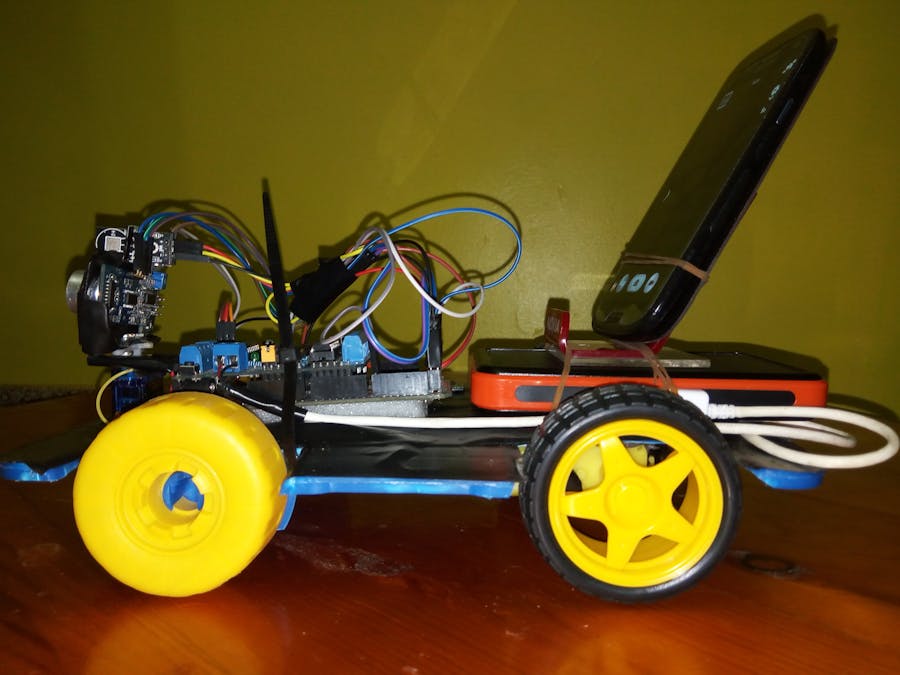
This project needs the application appInventor downloaded on the smartphone, to use the accelerometer and control the navigation of the mobile robot. On this robot we have a Bluetooth module connected to Arduino Mega and we added some sensors to sense the environment.
1 / 2
signed int x;
signed int y;
signed int z;
signed int btna;
signed int btnb;
float a;
float m;
String str;
char dir = 0;
int ML = 4;
int MR = 7;
int EL = 5;
int ER = 6;
int el = 0;
int er = 0;
int elp = 0;
int erp = 0;
boolean fast = true;
boolean StateA0 = false;
boolean StateA1 = false;
boolean State11 = false;
void setup() {
pinMode(MR, OUTPUT);
pinMode(ML, OUTPUT);
pinMode(ER, OUTPUT);
pinMode(EL, OUTPUT);
pinMode(11, OUTPUT);
pinMode(A0, OUTPUT);
pinMode(A1, OUTPUT);
Serial.begin(9600);
Serial.println("Start");
}
void loop()
{
while(Serial.available())
{
char getData = Serial.read();
if (getData == 'M')
{
m = Serial.parseFloat();
if (Serial.read() == '#')
{
processM();
}
}
if (getData == 'A')
{
a = Serial.parseFloat();
if (Serial.read() == '#')
{
processA();
}
}
if (getData == 'a')
{
delay(5);
if (Serial.read() == '#')
{
processa();
}
}
if (getData == 'b')
{
delay(5);
if (Serial.read() == '#')
{
processb();
}
}
if (getData == 'c')
{
delay(5);
if (Serial.read() == '#')
{
processc();
}
}
if (getData == 'x')
{
delay(5);
if (Serial.read() == '#')
{
processx();
}
}
if (getData == 'y')
{
delay(5);
if (Serial.read() == '#')
{
processy();
}
}
if (getData == 'z')
{
delay(5);
if (Serial.read() == '#')
{
processz();
}
}
if (getData == '~') {
x = Serial.parseInt();
if (Serial.read() == '*') {
y = Serial.parseInt();
if (Serial.read() == '@') {
z = Serial.parseInt();
if (Serial.read() == '#') {
process();
}
}
}
}
}
}
void processa(){
Serial.println("Button a! ");
StateA0 = !StateA0;
if (StateA0 == true) { digitalWrite(A0, HIGH); } else { digitalWrite(A0, LOW); }
Serial.flush();
}
void processb(){
Serial.println("Button b! ");
State11 = !State11;
if (State11 == true) { digitalWrite(11, HIGH); } else { digitalWrite(11, LOW); }
Serial.flush();
}
void processc(){
Serial.println("Button c! ");
StateA1 = !StateA1;
if (StateA1 == true) { digitalWrite(A1, HIGH); } else { digitalWrite(A1, LOW); }
Serial.flush();
}
void processx(){
Serial.println("Button x! ");
Serial.flush();
fast = true;
}
void processy(){
Serial.println("Button y! ");
Serial.flush();
}
void processz(){
Serial.println("Button z! ");
Serial.flush();
fast = false;
}
void processM(){
// m1 = map(m, 0, 500, 0, 255);
// Serial.print("Received Magnitude: ");
// Serial.println(m1);
// Serial.flush();
}
void processA(){
Serial.print("Received Angle: ");
Serial.println(a);
Serial.flush();
}
void process(){
if (fast == false) { er = map(y, 0, 500, 0, 255); }
else { er = y; }
if (er < 0) {
digitalWrite(MR, HIGH);
}
else if (er >= 0) {
digitalWrite(MR, LOW);
}
erp = abs(er);
if (fast == false) { el = map(x, 0, 500, 0, 255); }
else { el = x; }
if (el < 0) {
digitalWrite(ML, HIGH);
}
else if (el >= 0) {
digitalWrite(ML, LOW);
}
elp = abs(el);
analogWrite(EL, elp);
analogWrite(ER, erp);
Serial.flush();
}



Comments
Please log in or sign up to comment.