


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
You want help in making this Project ??
Watch the video
I made a new project named Human Following Bot.
If you want to simulate this Human Following Robot on Proteus then watch this video : https://youtu.be/AfrxI4tO7p0
watch the whole video to make this project at home.
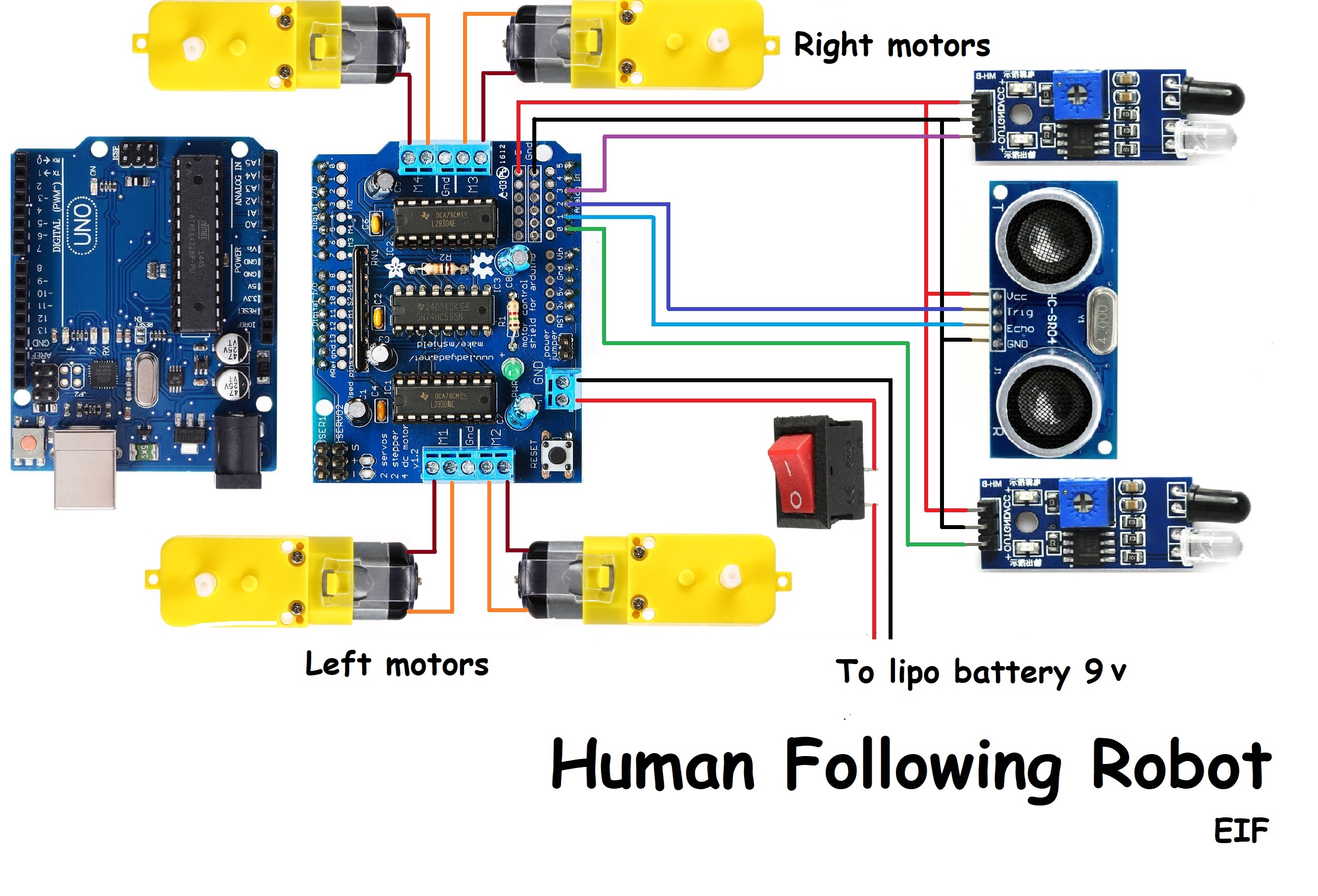
It used 2 IR sensors and an ultrasonic sensor. IR sensors used to follow the human or object and ultrasonic sensor is used to move back the robot.
If you like this project respect it.
Give me suggestions so I can improve it or any feedback you want to give to my YouTube channel.
link is : $ https://studio.youtube.com/channel/UCaXI2PcsTlH5g0et67kdD6g $
Also you can give me suggestions on "What I made next project.?"
Steps to make this project:1. Gather components like Arduino, Dc geared motors with wheels, 2 IR sensors, ultrasonic sensor, servo motor, cardboard, l293d motor driver shield, battery 9 v, switch, Jumper wires etc.
2. Take cardboard and place all 4 motors with wheels on it to make a car.
3. Place IR sensors on the car.
4. Stick servo motor on the car.
5. Place ultrasonic sensor in box and add handle to it after that connect it on servo motor.
6. Connect arduino and l293d motor shield on car.
7. Do connections as shown in circuit diagram.
8. Upload the code and connect switch with battery to l293d motor driver shield.
Adjust the sensitivity of IR sensors.
Your project is ready...!!!
Visit my YouTube channel once and see more interesting projects.
"Electronics is Fun"






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments