

Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
 |
| |||||
| ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
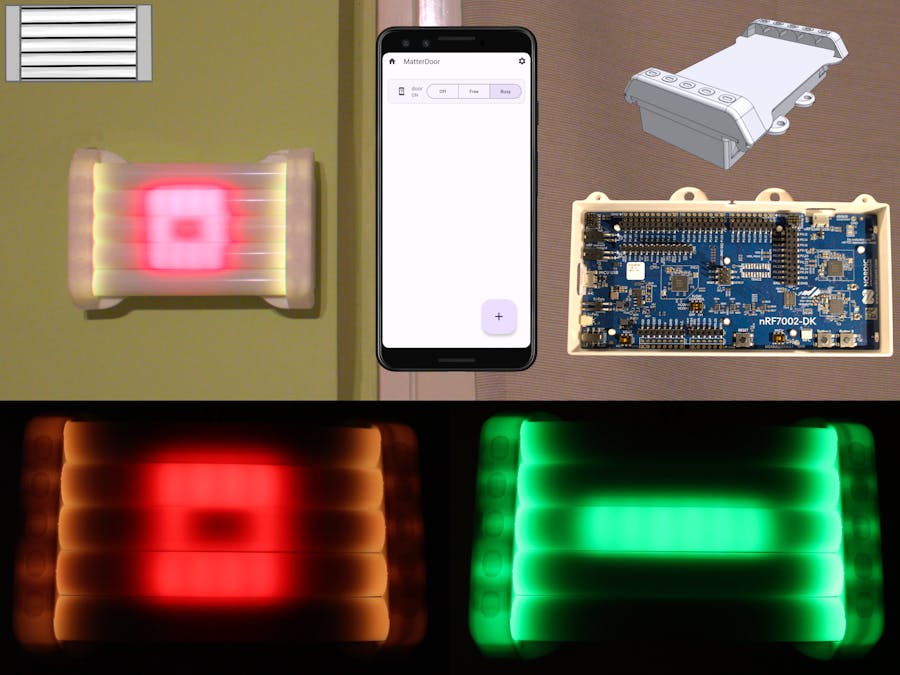
A problem I encountered during the pandemic attending online lectures was that my family did not know when I had my online classes. They would enter the room during lectures or tests. The problem is also present when working from home. People walking in when attending meetings was something everyone had to get used to. But there is a solution! If you have visited a radio station or saw one in a movie, you must have seen the large ON AIR signs which light up signaling you to be cautious. I have made one for myself during the pandemic to signal when not to enter. This project (MatterDoor) is a better version of that prototype. It has cool animations on the five-row RGB display in the front of the device. The brain of MatterDoor is the nRF7002DK, Nordic Semiconductor's latest Matter-capable development kit. MatterDoor can be commissioned to and controlled via a custom Matter fabric using an Android app, or any existing Matter-compatible ecosystem. Say goodbye to interrupted meeting and lectures.
Matter and SDKMatter is a new application-layer protocol developed by members of the Connectivity Stands Alliance aiming to be the industry standard protocol for all IoT devices. Both Google and Apple pledged to support it for their smart home ecosystems. An important feature is the ability of Matter-compatible devices to be commissioned into multiple ecosystems (called Matter fabrics), allowing the end user the freedom to choose their ecosystem without having to worry whether the device will support it. Additionally, simultaneous control from separate ecosystems is also possible.
This project was the first time I used the nRF SDK. I was happy to see that Nordic offers an nRF Connect SDK Fundamentals course, which I have completed, earning a certificate 🎉 I highly recommend this course. Additionally, I have watched the following webinars about Matter:
- Introduction to Matter
- Developing Matter 1.0 products with nRF Connect SDK
- How to go to market with Matter
To get familiar with the concepts discussed here, I recommend watching at least the first of these webinars.
HardwareI decided to use the form factor of the nRF7002 Development Kit for the sign. I have considered several display technologies:
- E-ink has the advantages of low power consumption and vibrant colors in bright light. But for a do not disturb sign, we need a way to get the attention of the person approaching the door, so display technologies emitting light are more suitable for that purpose.
- LCD displays offer high resolution while still being visible in the dark.
- OLED displays have a great viewing angle, but are more expensive and the form factors are smaller.
- Programmable LEDs offer a great way for custom displays, but the light needs to be diffused.
In the end, I decided to use WS2812B programmable LEDs for the display part since I could design the display to match the dimensions of the nRF7002DK. It also meant that I could design some cool animations to be run on the display. To diffuse the light, I used tubes designed for LED strips.
3D-printed partsThe housing I designed consists of four major parts and an optional switch cover. The STL files of the designed casing are available here. GitHub has a nice 3D viewer, but here are some screenshots from Shapr3D, the software I used to design the casing:
The bottom part of the casing will house the nRF7002DK, while the top part will hold the LED tubes. The assembled 3D model can be viewed here.
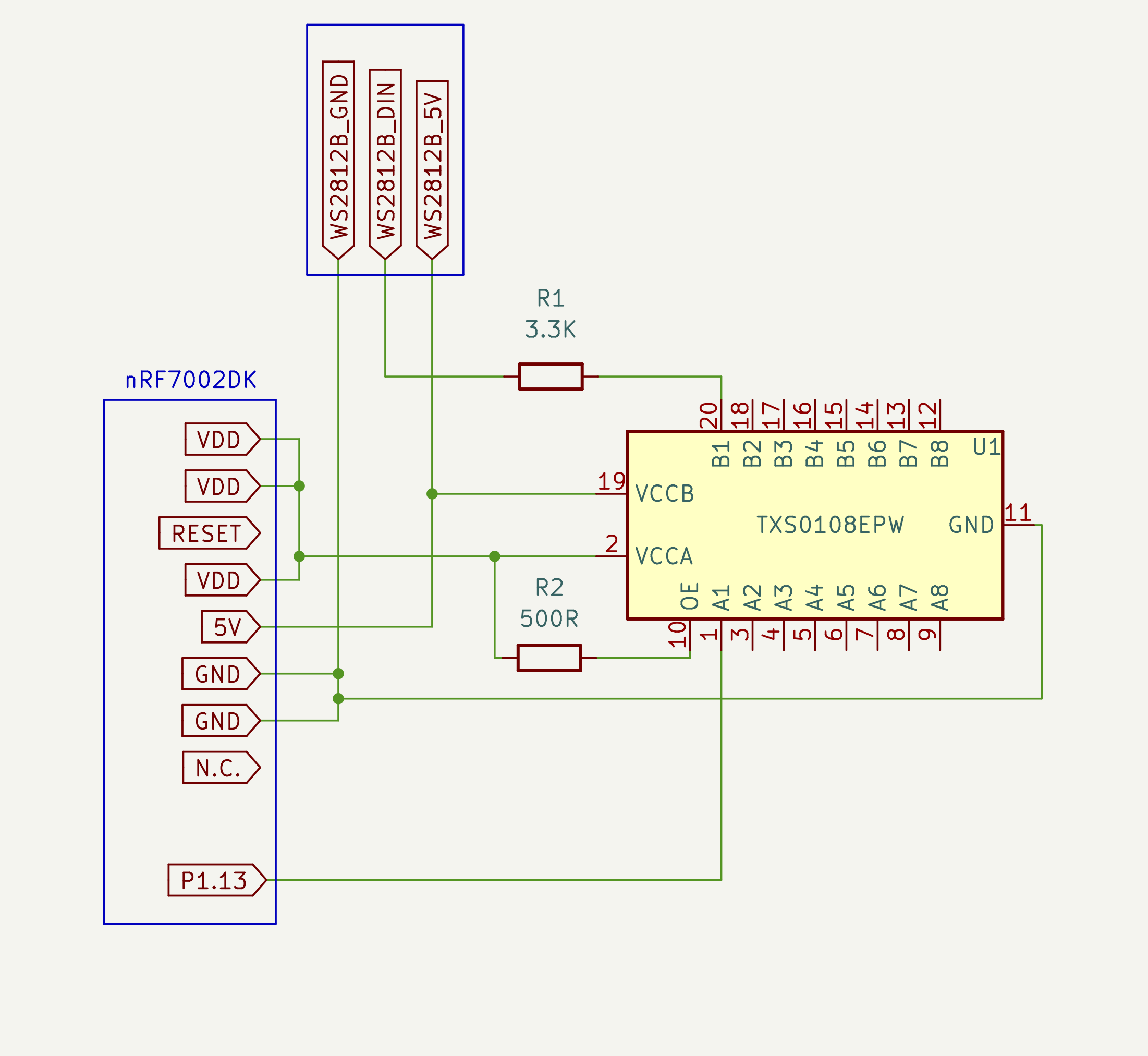
AssemblyFor the electronics-side, the components need to be soldered together based on the following schematic:
The 8 pins grouped together on the left need to be connected to a header in the nRF7002DK and the P1.13 label marks the wire that needs to be connected to that pin on the board:
Keep in mind that VDD is 1.8V. So using the correct ordering of the pins on the header is important, it has to be connected in that exact order. The wiring is shown below:
The three wires leaving the perfboard are to be connected to the LED strip.
Creating the displayCut five, 12.5cm-long sections from the tube and cut five 12-pixel-long sections from the LED strip. The next step is placing the cut strip parts in alternate orientation parallel to each other. Soldering wires to the GND and 5V pins on one side of the strips is the next step, then connecting these and joining it to the 5V and GND wires leaving the perfboard. The DIN wire from the perfboard needs to be connected to the input of the first strip section. Placing the LEDs in the tubes is the next step, followed by soldering the data wires between the strips the following way:
The next step is putting double-sided tape on the top cover. It may not be strong enough, so some other glue can be used as well:
After securing the tubes on the top plate, the two side pieces can be slid over from the sides. The three wires leaving the top panel need to be routed through one of the two holes in the top panel.
The assembly of the top part is then complete. Two additional wires can be soldered to the 5V and GND pins so that power can be supplied directly instead of through the Micro USB port. The perfboard can be covered up with hot glue. An important part is to cover up the side close to the nRF7002DK board. Putting a piece of duct tape there is needed to prevent potential short circuits.
The last step is assembling the top and bottom parts and the hardware-part is complete:
There were three main challenges with the software:
- Get the LED strip to work with the nRF7002DK
- Modifying the Matter template: 1) Using ZAP was challenging; 2) Long compile times before linking fails
- Controlling the device from my phone: In the end, I chose to modify Google's Google Home Mobile SDK Sample Applications for Matter to create my own Matter fabric.
As someone familiar with the Arduino framework, I got used to having lots of libraries and examples for peripherals. Controlling WS2812B LEDs just worked with every microcontoller I have tried before. Even with 3.3V logic level microcontrollers like the ESP32, running a FastLED or a NeoPixel example code worked out of the box. Since the nRF7002DK is a relatively new board, so far the official Zephyr repo did not support it. As a result, I looked for examples elsewhere. The only example I could find was a hackster.io project. As shown in the hardware section, the board has 1.8V logic level, which makes a logic level shifter necessary. Even though I added one, I could not get the example to work. I tried modifying the official example from the Zephyr repo to work with the nRF53 and I managed to make it work, but it was unstable. I could control the first couple of LEDs, but afterwards, the LEDs just showed random colors. I adjusted several config options, but the display was still unstable. It was at that point that I decided to raise a ticket in Nordic DevZone to ask if there was an official example. Thanks to Kenneth from Nordic, I started investigating if the level shifting was working correctly. I switched to using the TXS0108E shown in the hardware section, but I still could not get a stable output. The final solution was to add the two resistors, one to pull high the Output Enable pin of the level shifter, the other to add resistance between the first LED's input and the bi-directional level shifter's high side. With these, controlling the display works flawlessly. In the spirit of open source, I created a pull request in the Zephyr repository to add support for nRF53-based boards (including nRF7002DK) in the WS2812 example: https://github.com/zephyrproject-rtos/zephyr/pull/64823
The LEDs are controlled over the I2S interface of the nRF5340. The overlay file for the board is the following:
#include <zephyr/dt-bindings/led/led.h>
&pinctrl {
i2s0_default_alt: i2s0_default_alt {
group1 {
/* Default I2S config for the nRF5340, P1.13 is the output */
psels = <NRF_PSEL(I2S_SCK_M, 1, 15)>,
<NRF_PSEL(I2S_LRCK_M, 1, 12)>,
<NRF_PSEL(I2S_SDOUT, 1, 13)>,
<NRF_PSEL(I2S_SDIN, 1, 14)>;
};
};
};
i2s_led: &i2s0 {
status = "okay";
pinctrl-0 = <&i2s0_default_alt>;
pinctrl-names = "default";
};
/ {
led_strip: ws2812 {
compatible = "worldsemi,ws2812-i2s";
i2s-dev = < &i2s_led >;
chain-length = <60>; /* arbitrary; change at will */
color-mapping = <LED_COLOR_ID_GREEN
LED_COLOR_ID_RED
LED_COLOR_ID_BLUE>;
reset-delay = <500>;
};
aliases {
led-strip = &led_strip;
};
};The I2S device is configured with the default pinout. From the four pins, I2S_SDOUT is the important one, which is the data output. Controlling WS2812B LEDs is achieved over a single wire, which means that the timing of the signals is crucial. With the I2S interface, a fixed clock frequency is provided and then the output bits are set in a way to 'emulate' as if the pin was set for the required interval to the correct logic level by the bits output to the I2S_SDOUT pin.
The led_strip needs to be added to the devicetree. Here, the important parameters are the reset-delay and the chain-length. A major difference between the WS2812 and WS2812B(more common) LEDs is that the latter require at least a 500us reset time. Though it may work with less time, it is better to follow the specification. The chain-length should be set to the length of the LED strip. In our case, that is 5 x 12 = 60. A WS2812B LED at full brightness can consume 60mA, which would result in a 3.6A current draw if all LEDs would be turned to full brightness. I could not find what is the maximal current output the nRF7002DK can handle through 5V pin, but since the USB 2.0 specification has a 500mA limit (though it is usually possible to draw up to 2A), I soldered in an external connector to be able to power the device from a separate 5V source. Additionally, when designing the animations on the display, an important consideration was this limit not to overload the voltage supply of the board.
In addition to configuring the drivers, the following config parameters are also needed:
CONFIG_SPI=n
CONFIG_I2S=y
CONFIG_WS2812_STRIP=y
CONFIG_WS2812_STRIP_I2S=ySince in the official WS2812 Zephyr example, SPI is the default device, that needs to be turned off and I2S on. The LED driver also needs to be enabled and the I2S mode needs to be set. With these parameters, it is possible to control the LEDs from the nRF7002DK.
Modifying the Matter templateIn the Developing Matter 1.0 products with nRF Connect SDK webinar, there was an example on how to use the Matter-template project and modify it to be a simple Matter light switch. I tried to follow that tutorial, but I encountered a strange issue at the ZAP step. ZAP is the program that would need to be used to create the Matter endpoint configuration. But there was a problem: whenever I would edit the configuration, it would show the zigbee configuration:
zap ./src/template.zapAnd there were no options to add Matter-specific endpoints. Then after saving the file, lots of lines were removed from the template.zap file. (I could see this from the diff). And the example that I could previously compile no longer worked. After tedious debugging, I found what was going on. In the source code of the ZAP generate script we have the following function for detecting the ZCL config files:
def detectZclFile(zapFile):
print(f"Searching for zcl file from {zapFile}")
prefix_chip_root_dir = True
path = 'src/app/zap-templates/zcl/zcl.json'
data = json.load(open(zapFile))
for package in data["package"]:
if package["type"] != "zcl-properties":
continue
prefix_chip_root_dir = (package["pathRelativity"] != "resolveEnvVars")
# found the right path, try to figure out the actual path
if package["pathRelativity"] == "relativeToZap":
path = os.path.abspath(os.path.join(
os.path.dirname(zapFile), package["path"]))
elif package["pathRelativity"] == "resolveEnvVars":
path = os.path.expandvars(package["path"])
else:
path = package["path"]
return getFilePath(path, prefix_chip_root_dir)Note that in the case of using relativeToZap, the path is joined to the path of the zapFile. In the matter template the template.zap file contains the following section:
"package": [
{
"pathRelativity": "relativeToZap",
"path": "../../../../../modules/lib/matter/src/app/zap-templates/app-templates.json",
"type": "gen-templates-json",
"version": "chip-v1"
},
{
"pathRelativity": "relativeToZap",
"path": "../../../../../modules/lib/matter/src/app/zap-templates/zcl/zcl.json",
"type": "zcl-properties",
"category": "matter",
"version": 1,
"description": "Matter SDK ZCL data"
}
],We can see that both the zcl.json and app-templates.json files are referenced relative to the location of the template.zap file. This was an issue for me since on my computer, I installed the nRF tools to /opt/nordic/ and the project was located in a folder in my home directory. Due to this, neither the generate.py script, nor the ZAP tool could find these files. The paths needed to be modified in template.zap to the correct values:
"package": [
{
"pathRelativity": "absolute",
"path": "/opt/nordic/ncs/v2.5.0/modules/lib/matter/src/app/zap-templates/zcl/zcl.json",
"type": "zcl-properties",
"category": "matter",
"version": 1,
"description": "Matter SDK ZCL data"
},
{
"pathRelativity": "absolute",
"path": "/opt/nordic/ncs/v2.5.0/modules/lib/matter/src/app/zap-templates/app-templates.json",
"type": "gen-templates-json",
"version": "chip-v1"
}
],Note that pathRelativity is changed to absolute which is not one of options in the generate.py source code, meaning that the path will be used as is, resulting in an absolute path. After opening the zap tool from the terminal, the Matter-related configurations were correctly loaded and I was able to add a new endpoint:
One thing to keep in mind is that after saving the file, the ZAP tool overwrites the paths to be relative again!
I added a Matter extended color light endpoint, but later turned off the color-related clusters. Apart from the Identify and On/Off clusters, the Level Control cluster was also used. This cluster will be the one controlling the state of the display. For the do not disturb sign, there are three states that need to be distinguished:
OFF- Turning off the display to save powerFREE- Actively signal that it is okay to enterBUSY- Signal not to enter
After editing and saving the template.zap file, the next step is to generate the files. In the code below, I replaced the absolute path to the folder of my Matter template project with <absolute-path-to-project-folder>.
python3 /opt/nordic/ncs/v2.5.0/modules/lib/matter/scripts/tools/zap/generate.py <absolute-path-to-project-folder>/src/template.zap -t /opt/nordic/ncs/v2.5.0/modules/lib/matter/src/app/zap-templates/app-templates.json -o <absolute-path-to-project-folder>/src/zap-generated
Searching for zcl file from <absolute-path-to-project-folder>/src/template.zap
🔧 Using temporary state directory: /var/folders/17/r70j3wcn3l3cyl1bpnsstz600000gn/T/zap.VwzxeJ
🤖 ZAP generation started:
🔍 input files: <absolute-path-to-project-folder>/src/template.zap
🔍 output pattern: <absolute-path-to-project-folder>/src/zap-generated
🔍 using templates: /opt/nordic/ncs/v2.5.0/modules/lib/matter/src/app/zap-templates/app-templates.json
🔍 using zcl data: /opt/nordic/ncs/v2.5.0/modules/lib/matter/src/app/zap-templates/zcl/zcl.json
🔍 zap version: ver. 2023.9.28, featureLevel 98, commit: cca76eb7c7e3eebff0056bff2da907a582b0848b from 2023-09-28T16:17:00.000Z, mode: binary, exe: zap-cli
🕐 Setup time: 794ms
👉 using input file: <absolute-path-to-project-folder>/src/template.zap
👉 using output destination: <absolute-path-to-project-folder>/src/zap-generated
🕐 File loading time: 119ms
🤖 Generating files:
✍ <absolute-path-to-project-folder>/src/zap-generated/callback-stub.cpp
✍ <absolute-path-to-project-folder>/src/zap-generated/CHIPClusters.h
✍ <absolute-path-to-project-folder>/src/zap-generated/gen_config.h
✍ <absolute-path-to-project-folder>/src/zap-generated/IMClusterCommandHandler.cpp
✍ <absolute-path-to-project-folder>/src/zap-generated/PluginApplicationCallbacks.h
✍ <absolute-path-to-project-folder>/src/zap-generated/CHIPClientCallbacks.h
✍ <absolute-path-to-project-folder>/src/zap-generated/access.h
✍ <absolute-path-to-project-folder>/src/zap-generated/endpoint_config.h
🕐 Generation time: 864ms
clang-format error: [Errno 2] No such file or directory: 'clang-format'
Files generated in: <absolute-path-to-project-folder>/src/zap-generatedAfterwards, we can see that in the src/zap-generated/ folder, the files were updated. Now the next step is adding the LED controller and animation logic, and configuring the handlers for the clusters that were added.
The first step is to modify the Kconfig file as shown below. The mainmenu string can be freely modified. The important change is to modify the I2S device to be enabled by default: (Added lines are marked with a + sign, a - sign notes removals compared to the original Matter template code)
#
# Copyright (c) 2022 Nordic Semiconductor
#
# SPDX-License-Identifier: LicenseRef-Nordic-5-Clause
#
- mainmenu "Matter nRF Connect Template Example Application"
+ mainmenu "MatterDoor"
# Sample configuration used for Thread networking
if NET_L2_OPENTHREAD
choice OPENTHREAD_NORDIC_LIBRARY_CONFIGURATION
default OPENTHREAD_NORDIC_LIBRARY_MTD
endchoice
choice OPENTHREAD_DEVICE_TYPE
default OPENTHREAD_MTD
endchoice
endif # NET_L2_OPENTHREAD
source "${ZEPHYR_BASE}/../modules/lib/matter/config/nrfconnect/chip-module/Kconfig.features"
source "${ZEPHYR_BASE}/../modules/lib/matter/config/nrfconnect/chip-module/Kconfig.defaults"
source "Kconfig.zephyr"
+
+ config I2S
+ default yThen the next step is adding the configuration in the nrf7002dk_nrf5340_cpuapp.overlay file:
/*
* Copyright (c) 2021 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: LicenseRef-Nordic-5-Clause
*/
#include <zephyr/dt-bindings/ipc_service/static_vrings.h>
+ #include <zephyr/dt-bindings/led/led.h>
/ {
chosen {
nordic,pm-ext-flash = &mx25r64;
};
+ led_strip: ws2812 {
+ compatible = "worldsemi,ws2812-i2s";
+
+ i2s-dev = < &i2s_led >;
+ chain-length = <60>;
+ color-mapping = <LED_COLOR_ID_GREEN
+ LED_COLOR_ID_RED
+ LED_COLOR_ID_BLUE>;
+ reset-delay = <1000>;
+ };
+ aliases {
+ led-strip = &led_strip;
+ };
};
/* Set IPC thread priority to the highest value to not collide with other threads. */
&ipc0 {
zephyr,priority = <0 PRIO_COOP>;
};
+ i2s_led: &i2s0 {
+ status = "okay";
+ pinctrl-0 = <&i2s0_default_alt>;
+ pinctrl-names = "default";
+ };
+
+ i2s_pinconf: &pinctrl {
+ i2s0_default_alt: i2s0_default_alt {
+ group1 {
+ psels = <NRF_PSEL(I2S_SCK_M, 1, 15)>,
+ <NRF_PSEL(I2S_LRCK_M, 1, 12)>,
+ <NRF_PSEL(I2S_SDOUT, 1, 13)>,
+ <NRF_PSEL(I2S_SDIN, 1, 14)>;
+ };
+ };
+ };
+ &gpio1 {
+ status = "okay";
+ };The changes to the overlay file are the same as the one introduced in the section about controlling the LEDs. And similarly as there, the prj.conf file also needs some modifications:
#
# Copyright (c) 2021 Nordic Semiconductor ASA
#
# SPDX-License-Identifier: LicenseRef-Nordic-5-Clause
#
# This sample uses Kconfig.defaults to set options common for all
# samples. This file should contain only options specific for this sample
# or overrides of default values.
# Enable CHIP
CONFIG_CHIP=y
CONFIG_CHIP_ENABLE_PAIRING_AUTOSTART=y
CONFIG_CHIP_PROJECT_CONFIG="src/chip_project_config.h"
# 32768 == 0x8000 (example Product ID added temporaly,
# but it must be changed with proper PID from the list:
# https://github.com/project-chip/connectedhomeip/blob/482e6fd03196a6de45465a90003947ef4b86e0b1/docs/examples/discussion/PID_allocation_for_example_apps.md)
- CONFIG_CHIP_DEVICE_PRODUCT_ID=32768
+ # Lighting 0x8005
+ CONFIG_CHIP_DEVICE_PRODUCT_ID=32773
CONFIG_STD_CPP14=y
# Add support for LEDs and buttons on Nordic development kits
CONFIG_DK_LIBRARY=y
# Bluetooth Low Energy configuration
- CONFIG_BT_DEVICE_NAME="MatterTemplate"
+ CONFIG_BT_DEVICE_NAME="MatterDoor"
# Other settings
CONFIG_THREAD_NAME=y
CONFIG_MPU_STACK_GUARD=y
CONFIG_RESET_ON_FATAL_ERROR=n
CONFIG_CHIP_LIB_SHELL=y
# Disable NFC commissioning
CONFIG_CHIP_NFC_COMMISSIONING=n
# Reduce application size
CONFIG_USE_SEGGER_RTT=n
+
+ CONFIG_SPI=y
+ CONFIG_I2S=y
+ CONFIG_LED_STRIP=y
+ CONFIG_WS2812_STRIP=y
+ CONFIG_WS2812_STRIP_I2S=yThe product ID (PID) is also modified, set to 0x8005. This config is also used to select the correct certificate belonging to the vendor and product IDs (VID and PID). A built-in certificate is used in this case since the PID falls within the range 0x8000-0x801F. For a final product, a proper certificate should be used. More information is available about this in the How to go to market with Matter webinar. For this demo project, it is fine to use the builtin certificate.
A less important, optional change is the modification of the sample.yaml file, which is used for tests, checking the devicetree:
sample:
- description: Matter Template sample
+ description: Matter Door Status
name: Matter Template
tests:
# Excluded in quarantine.yaml to limit resources usage in integration builds
- nrf5340dk_nrf5340_cpuapp
- nrf7002dk_nrf5340_cpuapp
platform_allow: nrf52840dk_nrf52840 nrf5340dk_nrf5340_cpuapp nrf7002dk_nrf5340_cpuapp
+ sample.drivers.led.ws2812:
+ tags: LED
+ filter: dt_compat_enabled("worldsemi,ws2812-i2s")
+ harness_config:
+ fixture: fixture_led_ws2812Now we turn our attention to the src folder's contents. Here is where the main logic will be. We have added the On/Off, the Level Control and the Identify endpoints to the Endpoint - 1 cluster. (A Descriptor cluster is also added, but that will not be implemented for now.) The first changes relating to the Identify cluster are the same as shown in the Developing Matter 1.0 products with nRF Connect SDK webinar. In app_event.h, two new values need to be added to the AppEventType enum:
class LEDWidget;
- enum class AppEventType : uint8_t { None = 0, Button, ButtonPushed, ButtonReleased, Timer, UpdateLedState };
+ enum class AppEventType : uint8_t { None = 0, Button, ButtonPushed, ButtonReleased, Timer, UpdateLedState, IdenfityStart, IdentifyStop,};
enum class FunctionEvent : uint8_t { NoneSelected = 0, FactoryReset };Next, in the app_task.h, there are multiple changes needed:
/*
* Copyright (c) 2021 Nordic Semiconductor ASA
*
* SPDX-License-Identifier: LicenseRef-Nordic-5-Clause
*/
#pragma once
#include "app_event.h"
#include "led_widget.h"
#include <platform/CHIPDeviceLayer.h>
#if CONFIG_CHIP_FACTORY_DATA
#include <platform/nrfconnect/FactoryDataProvider.h>
#else
#include <platform/nrfconnect/DeviceInstanceInfoProviderImpl.h>
#endif
+ #include <app/clusters/identify-server/identify-server.h>
+
+ #include <app/clusters/on-off-server/on-off-server.h>
+ #include <app/clusters/level-control/level-control.h>
+
struct k_timer;
class AppTask {
public:
static AppTask &Instance()
{
static AppTask sAppTask;
return sAppTask;
};
+
+ enum DispState {
+ OFF = 0,
+ FREE = 1,
+ BUSY = 2
+ };
+
CHIP_ERROR StartApp();
static void PostEvent(const AppEvent &event);
+ void setState(DispState newState);
+ static void dispThread(void);
+ DispState currentState = OFF;
+
private:
CHIP_ERROR Init();
void CancelTimer();
void StartTimer(uint32_t timeoutInMs);
static void DispatchEvent(const AppEvent &event);
static void UpdateLedStateEventHandler(const AppEvent &event);
static void FunctionHandler(const AppEvent &event);
static void FunctionTimerEventHandler(const AppEvent &event);
static void ChipEventHandler(const chip::DeviceLayer::ChipDeviceEvent *event, intptr_t arg);
static void ButtonEventHandler(uint32_t buttonState, uint32_t hasChanged);
static void LEDStateUpdateHandler(LEDWidget &ledWidget);
static void FunctionTimerTimeoutCallback(k_timer *timer);
static void UpdateStatusLED();
+ static void IdentifyStartHandler(Identify *identify);
+ static void IdentifyStopHandler(Identify *identify);
+
+ static void OnOffEffectHandler(OnOffEffect * effect);
+ static void clearAll();
+ static void set(int x, int y, int r, int g, int b);
+ static void drawX(int offset100, int brightness);
+ static void drawFree(int offset100, int brightness);
FunctionEvent mFunction = FunctionEvent::NoneSelected;
bool mFunctionTimerActive = false;
+ static Identify sIdentify;
+ static OnOffEffect sOnOffEffect;
#if CONFIG_CHIP_FACTORY_DATA
chip::DeviceLayer::FactoryDataProvider<chip::DeviceLayer::InternalFlashFactoryData> mFactoryDataProvider;
#endifSome include directives are added, relating to the clusters added earlier to the zap file. A new enum is introduced (DispState), which will be used to sync the state of the sign between the Matter fabric and the MatterDoor device. Several other functions are added and two static variables for the handlers. The implementations of all of these functions are shown and explained below.
The app_task.cpp file starts with the following macros and declarations:
#include <zephyr/kernel.h>
#include <zephyr/logging/log.h>
+ #include <app-common/zap-generated/attributes/Accessors.h>
+ #include <errno.h>
+ #include <string.h>
+ #include <zephyr/drivers/led_strip.h>
+ #include <zephyr/device.h>
+ #include <zephyr/drivers/i2s.h>
+ #include <zephyr/sys/util.h>
+ #include <zephyr/sys/printk.h>
+ #define STRIP_NODE DT_ALIAS(led_strip)
+ #define STRIP_NUM_PIXELS DT_PROP(DT_ALIAS(led_strip), chain_length)
+ #define DELAY_TIME K_MSEC(6)
+ #define RGB(_r, _g, _b) { .r = (_r), .g = (_g), .b = (_b) }
+ #define DISPLAY_TASK_PRIORITY 1
+ static struct led_rgb pixels[STRIP_NUM_PIXELS];
+ static const struct device *const strip = DEVICE_DT_GET(STRIP_NODE);
+ K_THREAD_DEFINE(disp_thread, 2048, AppTask::dispThread, NULL, NULL, NULL, DISPLAY_TASK_PRIORITY, 0, 0);After the includes, we get the STRIP_NODE from the devicetree and the number of pixels of the LED strip from that node. A 6 millisecond delay time is defined, which will be used for the delay between two frames of the BUSY and FREE state animations. We also define a more convenient way to use RGB colors. The DISPLAY_TASK_PRIORITY is used for the new thread we are defining in the last line of the above code. This thread will be responsible for displaying the animations on the five-row WS2812B display. We also define the pixels variable which will be used to set the colors of the strip. The strip variable will be used to control the the LED strip.
Let's check the newly created dispThread() function next:
void AppTask::dispThread(void){
int rc;
printk("Display thread started\n");
if (device_is_ready(strip)) {
LOG_INF("Found LED strip device %s", strip->name);
} else {
LOG_ERR("LED strip device %s is not ready", strip->name);
return;
}
LOG_INF("Displaying pattern on strip");
memset(&pixels, 0x00, sizeof(pixels));
DispState prevState = Instance().currentState;
DispState nextState = Instance().currentState;
int maxbrightness = 50;
int cntr = 0;
int currbrightness = 50;
while (1) {
if(nextState != prevState){
if(currbrightness <= 0){
prevState = nextState;
currbrightness++;
}else{
currbrightness--;
}
}else if(currbrightness < maxbrightness){
currbrightness++;
}
cntr = (cntr+1)%(100*12);
switch (prevState){
case OFF:
clearAll();
break;
case FREE:
drawFree(cntr,currbrightness);
break;
case BUSY:
drawX(cntr,currbrightness);
break;
default:
break;
}
rc = led_strip_update_rgb(strip, pixels, STRIP_NUM_PIXELS);
if (rc) {
LOG_ERR("couldn't update strip: %d", rc);
}
k_sleep(DELAY_TIME);
if(nextState != Instance().currentState){
nextState = Instance().currentState;
}
}
}After some initialization steps, all pixels of the strip are off. We store the current and the next state in separate variables. This enables transitioning between these animations in a smooth way. The maxbrightness variable sets the maximum brightness any color channel will have. It can be increased to 255 if the device is to be used in bright areas, but note that this will result in increased power consumption. The currbrightness variable stores the current brightness level, which is used during transitions between different states. If Instance().currentState does not match the state within the thread, the nextState gets updated and the following events will occur:
- The brightness of the current animation is decremented at each iteration.
- When the brightness reaches 0, the state is updated to the new one, meaning that starting this iteration, the new animation is displayed.
- The brightness is incremented at each iteration until
maxbrightnessis reached.
cntr is a variable which is used as a time parameter of the drawFree(...) and drawX(...) animations to signal which frame to draw. led_strip_update_rgb is called in each iteration to set the LED pixel states on the display based on the contents of the pixels array.
The next functions we examine are set(...), clearAll() and flicker(...), which are used by the animation functions (drawX(...), drawFree(...)):
void AppTask::set(int x, int y, int r, int g, int b){
int idx = 0;
if(y%2 == 0){
idx = y*12+(11-x);
}else{
idx = y*12+x;
}
pixels[idx].r = r;
pixels[idx].g = g;
pixels[idx].b = b;
}
void AppTask::clearAll(){
memset(&pixels, 0x00, sizeof(pixels));
}
int inline flicker(int value, int offset){
return (value*(100-abs(50-offset%100)))/100;
}The set(...) function is a simple mapping of the strip to the coordinates shown in the following figure, enabling the use of 2D coordinates in the animations:
clearAll() is used to clear the strip to black. flicker(...) is a simple mapper function which can be used to have a continuous linear change in the output between value and value/2 depending on the offset. We will use it to get a pulsing effect.
Now that the helper functions are defined, the next step is visualizing the FREE and BUSY states:
void AppTask::drawX(int offset100, int brightness){
int factor = offset100%100;
int offset = offset100/100;
clearAll();
set(4,1,flicker(brightness,factor),0,0);
set(5,1,flicker(brightness,factor),0,0);
set(6,1,flicker(brightness,factor),0,0);
set(7,1,flicker(brightness,factor),0,0);
set(4,2,flicker(brightness,factor+20),0,0);
set(7,2,flicker(brightness,factor+20),0,0);
set(4,3,flicker(brightness,factor+40),0,0);
set(7,3,flicker(brightness,factor+40),0,0);
set(4,3,flicker(brightness,factor+60),0,0);
set(5,3,flicker(brightness,factor+60),0,0);
set(6,3,flicker(brightness,factor+60),0,0);
set(7,3,flicker(brightness,factor+60),0,0);
int level = flicker(brightness,offset*9+factor/12)-brightness/3;
for(int i = 0; i < 5; i++){
set(0,i,level,brightness/10,0);
set(11,i,level,brightness/10,0);
}
}
void AppTask::drawFree(int offset100, int brightness){
int factor = offset100%100;
int offset = (offset100/240)%5;
clearAll();
int fromzero = 120-abs(120-offset100%240);
int rcolor = (brightness*fromzero)/120;
set(0,0,0,flicker(brightness,factor),0);
set(11,0,0,flicker(brightness,factor),0);
set(0,1,0,flicker(brightness,factor+20),0);
set(11,1,0,flicker(brightness,factor+20),0);
set(0,2,0,flicker(brightness,factor+40),0);
set(11,2,0,flicker(brightness,factor+40),0);
set(0,3,0,flicker(brightness,factor+60),0);
set(11,3,0,flicker(brightness,factor+60),0);
set(0,4,0,flicker(brightness,factor+80),0);
set(11,4,0,flicker(brightness,factor+80),0);
for(int i = 3; i < 9; i++){
set(i,offset,0,rcolor,0);
}
}Here is what these animations look like on the display:
The handler functions also need to be defined:
void AppTask::IdentifyStartHandler(Identify *) {
AppEvent event;
event.Type = AppEventType::IdenfityStart;
event.Handler = [](const AppEvent &event) {
sFactoryResetLEDs.Blink(LedConsts::kIndentifyBlinkRate_ms);
};
PostEvent(event);
}
void AppTask::IdentifyStopHandler(Identify *) {
AppEvent event;
event.Type = AppEventType::IdentifyStop;
event.Handler = [](const AppEvent &event) {
sFactoryResetLEDs.Set(false);
};
PostEvent(event);
}
void AppTask::OnOffEffectHandler(OnOffEffect *effect) {
}
void AppTask::setState(DispState newState){
currentState = newState;
}The Identify cluster's functions are the same as in Developing Matter 1.0 products with nRF Connect SDK. The callback handlers are needed to initialise the sIdentify and sOnOffEffect variables. Additionally, the blink rate and the light endpoint id needs to be defined. The location for these insertions can be checked in the app_task.cpp file.
constexpr uint32_t kIndentifyBlinkRate_ms{ 500 };
constexpr uint8_t kLightEndpointId = 1;
Identify AppTask::sIdentify = { kLightEndpointId, AppTask::IdentifyStartHandler, AppTask::IdentifyStopHandler, EMBER_ZCL_IDENTIFY_IDENTIFY_TYPE_VISIBLE_LED};
OnOffEffect AppTask::sOnOffEffect = { kLightEndpointId, AppTask::OnOffEffectHandler };So far, the Identify cluster is working and the animations for the states are defined, but how can we control this remotely? We need a way to set the state within our AppTask instance. To do that, let's create a new file, callbacks.cpp:
#include "app_task.h"
#include <app-common/zap-generated/attributes/Accessors.h>
#include <app-common/zap-generated/ids/Clusters.h>
#include <app/ConcreteAttributePath.h>
#include <app/data-model/Nullable.h>
#include <lib/core/DataModelTypes.h>
#include <lib/support/CodeUtils.h>
#include <app/clusters/on-off-server/on-off-server.h>
#include <app/clusters/level-control/level-control.h>
using namespace ::chip;
using namespace ::chip::app::Clusters;
using namespace ::chip::app::Clusters::ColorControl;
using namespace ::chip::app::Clusters::LevelControl;
using namespace ::chip::app::Clusters::OnOff;
using ::chip::app::DataModel::Nullable;
LOG_MODULE_DECLARE(app, CONFIG_CHIP_APP_LOG_LEVEL);
void MatterPostAttributeChangeCallback(const chip::app::ConcreteAttributePath & attributePath, uint8_t type, uint16_t size, uint8_t * value)
{
LOG_INF("-----------------> Post attribute change callback! %d %d %d", type, size, *value);
if(type == 32){
if(size == 1){
LOG_INF("Setting display state to %d", *value);
AppTask::Instance().setState((AppTask::DispState) (*value));
}
}
}In the callback, everything other than type 0x20 is filtered out. 0x20 corresponds to an unsigned 8-bit attribute, which is the type of the CurrentLevel attribute within the Level Control cluster:
Checking the attribute this way is not ideal since other uint8 attributes can also alter the display state, but for now, there seemed to be no issues. Ideally, the attribute path would need to be checked instead. After filtering out the unrelevant messages, the state within the AppTask instance needs to be set and the rest is handled by the display task shown earlier. Finally, we need to add this file to the sources in CMakeLists.txt:
...
target_sources(app PRIVATE
src/app_task.cpp
src/main.cpp
src/zap-generated/IMClusterCommandHandler.cpp
src/zap-generated/callback-stub.cpp
+ src/callbacks.cpp
${COMMON_ROOT}/src/led_widget.cpp
)
...The firmware in now complete, the final step is compiling it and flashing it to the nRF7002DK. The file structure of the final Matter project should look something like this (some extra unused config files are not shown).
.
├── CMakeLists.txt
├── Kconfig
├── README.rst
├── boards
│ └── nrf7002dk_nrf5340_cpuapp.overlay
├── configuration
│ └── nrf7002dk_nrf5340_cpuapp
│ └── pm_static_dfu.yml
├── prj.conf
├── sample.yaml
└── src
├── app_config.h
├── app_event.h
├── app_task.cpp
├── app_task.h
├── callbacks.cpp
├── chip_project_config.h
├── main.cpp
├── template.matter
├── template.zap
└── zap-generated
├── CHIPClientCallbacks.h
├── CHIPClusters.h
├── IMClusterCommandHandler.cpp
├── PluginApplicationCallbacks.h
├── access.h
├── af-gen-event.h
├── callback-stub.cpp
├── endpoint_config.h
├── gen_config.h
└── gen_tokens.hNow that the MatterDoor device is ready, we need to connect it to a Matter fabric. I wanted to understand how the process would work if I had my own Fabric, so I chose to modify Google's Google Home Mobile SDK Sample Applications for Matter. The final, modified code is available in the repository's android-app folder. The changes done can be categorised the following way:
- New icon 🎉
- Changing UI so that instead of a simple On/Off option, we have the option to select between the
FREEandBUSYmodes in addition to theOFFmode:
- Replacing the On/Off cluster controller logic to Level cluster controlling logic: A level setting of 0 means the device is
OFF, 1 meansFREE, 2 meansBUSY. Though the On/Off cluster is also enabled on the nRF7002DK, that is not in use. For consistency, I usedsetLevelDeviceStateOnOffCluster(...)to set the level value. This function also controls the On/Off cluster automatically based on the level value.
After building and launching the app on the phone, we can start adding a new device. Open the app and click on the plus icon on the bottom right corner to add a new device:
Scan the QR code, which is available on the url output to the console of the nRF7002DK, or enter the setup code available on the console output:
Wait for the commissioning process to complete. If the connection is unsuccessful, turn off any VPN connections on the phone, long press button 1 on the nRF7002DK to factory reset it, and try the process again.
Name the device.
After that, the display state of MatterDoor can be controlled from the app:
The demo video is showing the setup process and MatterDoor in use:
A note on licensesAll third-party brands (including brand names, logos, trademarks and icons) remain the property of their respective owners. Matter is developed by the Connectivity Standards Alliance.
The original Google Home Sample App for Matter is licensed under the Apache License, Version 2.0
The Matter template code used (https://github.com/nrfconnect/sdk-nrf/tree/main/samples/matter/template) is available under this license.






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
Comments