

NOTE - Due to various restrictions and raised government taxes and duties during the pandemic, I was not able to receive the NXP KIT-RDDRONEK66 drone kit. So, instead I made use of the NXP 8MMNavQ kit.
By using SSD, we only need to take one single shot to detect multiple objects within the image, while regional proposal network (RPN) based approaches such as R-CNN series that need two shots, one for generating region proposals, one for detecting the object of each proposal. Thus, SSD is much faster compared with two-shot RPN-based approaches.
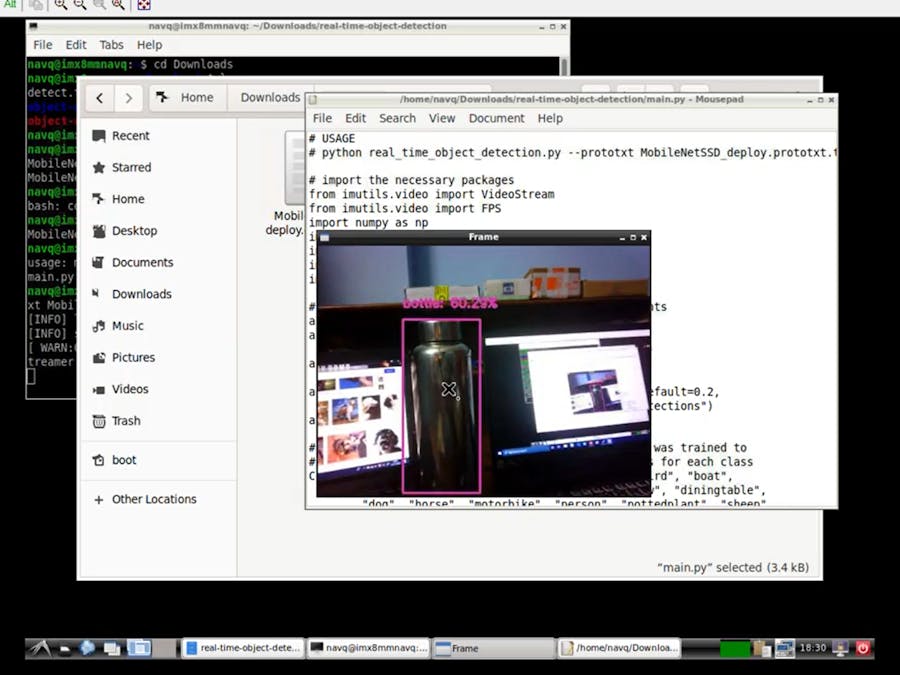
I used the dnn module (Deep Neural Networks) of OpenCV for loading the caffe and prototxt files.
I found the MobileNetSSD_deploy.prototxt.txt and MobileNetSSD_deploy.caffemodel pre-trained weight files from the https://awesomeopensource.com/project/chuanqi305/MobileNet-SSD



{kind=link}
Comments