


Hardware components | ||||||
| × | 1 | ||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
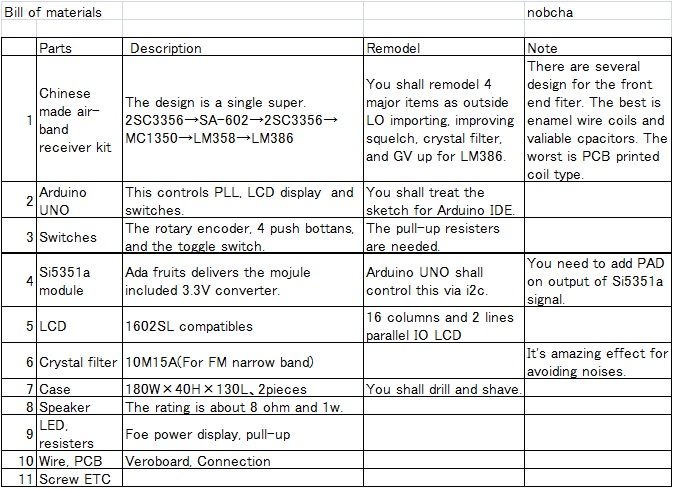
Buy the kit from the Chinese EC and assemble it by refering below BLOG or manual.
https://nobcha23.hatenablog.com/entry/20170802/1501676018
http://n5dux.com/ham/kits/Airband-Receiver/manual.pdf
Japanese edition "http://chitose6thplant.web.fc2.com/AB/manual.pdf"
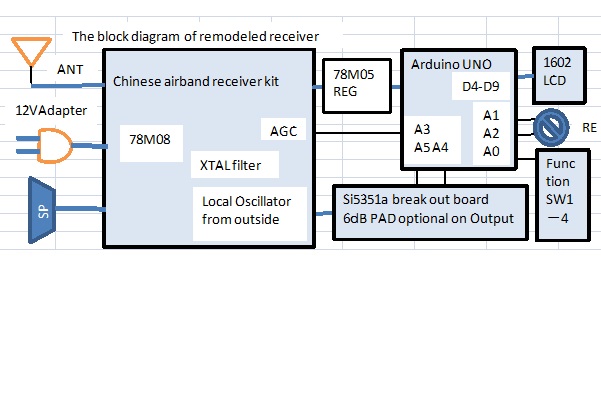
To utilize this kit effectively, you shall replace the local oscillator with the digital VFO.
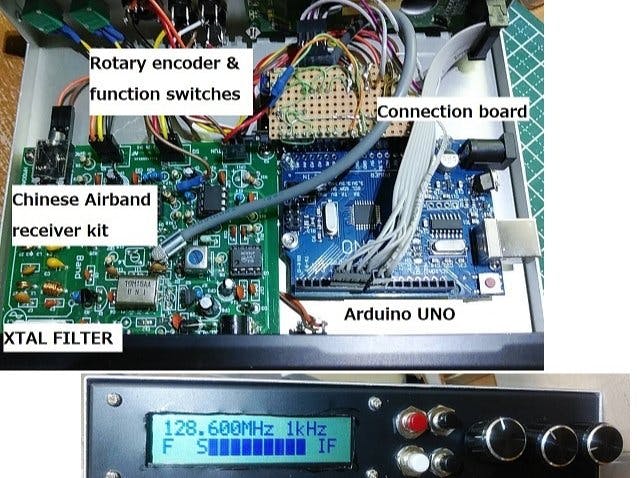
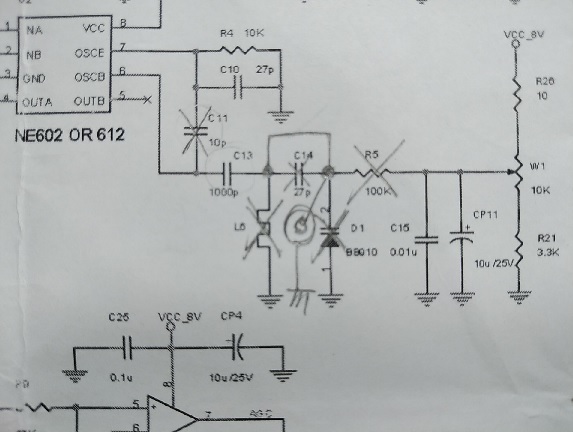
1. On the radio PCB you shall change the local oscillator as an attached circuit diagram.
2. The optional digital oscillator is configured with Arduino UNO, Si5351a module, the switches, and 1602A LCD.
Prior to remodel the kit, please check how to connect with the modules.
You shall connect 1602A LCD via 4 bits IF, Si5351a module via i2c IF, and wired SWs. We shall use UNO's port as A0:SWs, A1, A2:RE-SW, A3:AGC of radio, and A4, A5:i2c.
The local oscillator signal of clock0 is going into radio circuit via 6dB PAD.
To assemble the above connection board, you need the parts in BOM.
I shall introduce how to operate this radio.
// si5351a ARDUINO LO Ver1.3 (LCD&KEY, i2c AQM1602 LCD)
// Rotary switch:sencing, Function switch: A0 analogue port
// Si5351_ADDR = 0x60, CPU:Arduino UNO, LCD: SC1602
// 20201025 LCD&KEY setting with i2c KIMURA code
// 20201029 append 25kHz STEP
// 20201107 Special for UNO setting, delete KIMURA's i2c LCD
// 20240227 To confirm hat this is the latest version
//
// LCD display 0123456789abcdef 20201003 changed
// 1602 100.000MHz100kHz
// M00S**********IF
// How to set fequency on Si5351a via i2c was based on TJ lab
// Thanks Dr.Uebo "https://tj-lab.org/2017/03/13/si5351/"
#include <Wire.h>
#include <LiquidCrystal.h> // ―→16x2
//lcd instance for parallel IO LCD
LiquidCrystal lcd( 8, 9, 4, 5, 6, 7); // for LCD&key pin assign
#define SQUELTCH A3
#define REA 15 // A1
#define REB 16 // A2
// Channel memory
#include <EEPROM.h>
#define Si5351_ADDR 0x60
#define led_pin 13
// Assign function number short/long pushing
#define NONE 0 // A1 port 1023 MAX
#define FREQ 1 // 8 modes defined
#define STEP 2
#define MEMORY 3
#define SCAN 4
#define FREQLONG 5 // long time push for FREQ set
#define STEPPUT 6 // long time push for STEP set
#define MEMORYPUT 7 // long time push for memory F set
#define SCANOFF 8 // long time push for Automatic SCAN set
#define FREQ_AD 0 // EEPROM address for FREQ data as long
#define FSTEP_AD 4 // EEPROM address for FSTEP data as long
#define MCHAN0 8 // MCHAN 0- 9 MCHAN0 + 4 * chan
/*
Rotary encoder handler for arduino. v1.1
Copyright 2011 Ben Buxton. Licenced under the GNU GPL Version 3. Contact: bb@cactii.net
http://www.buxtronix.net/2011/10/rotary-encoders-done-properly.html
Rotary encoder test debug scketch
PWM/3: Rotary A --> A1=15 -->D1
PWM/2: Rotary B --> A2=16 -->D2
GND: C
*/
#include <Rotary.h>
Rotary r = Rotary(REA, REB);
// functions
void LCD_Disp ( char, char, char*);
void Dsp_Disp(void);
void Step_Disp(void);
void LongToStr(long , char*);
void Fdds_Space(char *);
void set_freq(unsigned long);
void si5351_init(void);
void cmd_si5351(char , char);
int function_key(void);
void monit(long,long);
unsigned char mode_define(unsigned char) ;
void sw_state_reset(void);
void s_meter_disp(void);
// variables
volatile boolean if_mode; // 1:局発モード10.7MHz+
volatile unsigned char mode = FREQ; // select mode as FREQ
volatile unsigned char mode_last = FREQ;
volatile char memo_ad = 0; // select memory address
unsigned char set_sw = 1; // set freq on memory, or step to freq
volatile unsigned long int freq1, fstep, freq_0;
// freq1: current F, freq_0; last F
volatile unsigned long int_time=0 ;
volatile unsigned long time0=0;
volatile unsigned long time1=0;
volatile unsigned char sw_result=0, sw_result0=5; // NONE:0,FREQ:1,STEP:2,MEMORY:3,SCAN:4
volatile int ADCdata;
volatile char scan_ad = 0; // scanning address counter
volatile boolean k; // led ON/OFF status
volatile unsigned char sw_pending = 0;
volatile char i = 0;
volatile unsigned char re_result = 0; // Rotary switch active result 0x10:right,0x20:left
volatile unsigned char result;
char mdisp[4] = { 0x4D, 0x30, 0x20, 0};
char stepdisp[4] = { 0x53, 0x54, 0x20,0 };
char spdisp[4] = { 0x20, 0x20, 0x20, 0 };
char scandisp[4] = { 0x53, 0x30, 0x20, 0 };
char freqdisp[4] = { 0x46, 0x20, 0x20, 0 };
volatile int agc_volt;
void setup() {
Wire.begin();
si5351_init(); // once 100MHz set
Serial.begin(9600);
Serial.println("\nsi5351a oscillator V1.3");
pinMode(led_pin, OUTPUT); // D13 : LED
pinMode(REA, INPUT_PULLUP); // Rotary encoder port
pinMode(REB, INPUT_PULLUP);
sw_result0 = function_key(); // Freq mode set on power start
if(sw_result0 == 0) if_mode=1; // When no action, set IF_mode as 10.7MHzon LO
// 並列接続LCDモジュールの初期化処理
lcd.begin(16,2); // set lib for display size (8x2)
lcd.clear(); // clear the screen
LCD_Disp ( 0, 0, "si5351a osc V1.3") ;
delay(500);
r.begin(true);
// EEPROM data recover for clock frequency data
// There are FREQ, FSTEP, and MCHAN0-9
EEPROM.get( FREQ_AD, freq1); // FREQ data recover from EPROM
EEPROM.get( FSTEP_AD, fstep); // fstep data from EEPROM Read
Dsp_Disp(); // display freq
Serial.println("\nFreq from EEPROM = ");
Serial.println(freq1);
freq_0=freq1;
if(freq1<10000000 || freq1>200000000) { //10-200MHz
LCD_Disp ( 0, 0, "Freq Read Error ") ;
Serial.println("\nFreq Read Error");
Serial.println(freq1);
freq1 = 100000000;
EEPROM.put( FREQ_AD, freq1); // FREQ data 100MHz for EPROM
freq_0 = 100000000;
for ( memo_ad =0 ; memo_ad <50; memo_ad++ ) {
EEPROM.put( FREQ_AD + 8 + memo_ad*4, freq_0); // FREQ data 100MHz for EPROM
}
delay(2000);
// LCD.PageClear() ;
lcd.clear(); // Once display off
delay(500);
}
if( fstep==1000 || fstep==10000 || fstep==100000 || fstep==25000 || fstep==1000000 || fstep==10000000) {
}
else{
LCD_Disp ( 0, 1, "Step Read Error") ;
Serial.println("\nStep Read Error");
Serial.println(fstep);
fstep=100000;
EEPROM.put( FSTEP_AD, fstep ); // fstep data 100kHz for EEPROM
delay(1000);
lcd.clear(); // Once display off after 1 second
delay(1000);
}
Dsp_Disp(); // 現在周波数を表示する
Step_Disp(); // 現在STEP周波数を表示する
freq_0=freq1;
if (if_mode==1) freq_0=freq1+10700000 ; // IFモード時は10.7MH上位を発振
set_freq(freq_0 ); // 現在周波数をSi5351aに設定する
freq_0=freq1;
}
void loop() {
unsigned char mode_last;
sw_result0 = function_key(); // A0ポートの電圧からキー判定
mode_last = mode ; // 20201002
mode = mode_define(mode_last); // キー入力受付と長押しキー判定
switch ( mode ){
case 1:{ // FREQ determining mode
LCD_Disp ( 0, 1, freqdisp ) ;
break;
}
case 2:{ // STEP select mode
LCD_Disp ( 0, 1, stepdisp ) ;
break;
}
case 3:{ // MEMORY ch select mode
LCD_Disp ( 0, 1, mdisp ) ;
break;
}
case 8: { // AUTO SCAN mode from M-chan
scandisp[1] = 0x30 | (scan_ad/10) ; // display scan chan
scandisp[2] = 0x30 | (scan_ad%10) ; // display scan chan
LCD_Disp ( 0, 1, scandisp ) ;
EEPROM.get( MCHAN0 + scan_ad*4, freq1); // read out MEM frequency
Dsp_Disp();
scan_ad++; // Changed 20201013
if (scan_ad > 49) scan_ad = 0;
if (freq1==100000000) break; // If 100MHz, then skip.
if (freq1==freq_0) break; // If same as with last one, then skip
freq_0=freq1;
if (if_mode==1) freq_0=freq1+10700000 ; // IFモード時は10.7MH上位を発振
set_freq(freq_0);
freq_0=freq1;
Serial.println("freq SCAN");
delay(200);
s_meter_disp(); // Get AGC voltage & change S-meter
if ( agc_volt > 200) delay(1000); // If squelch off, wait 1 sec
s_meter_disp(); // Get AGC voltage & change S-meter
if ( agc_volt > 200) delay(1000); // If squelch off, wait 1 sec
break;
}
case 5:{ // FREQ button long pus
LCD_Disp ( 0, 1, spdisp) ; // 2行目1文字目space表示
delay(500);
LCD_Disp ( 0, 1, freqdisp) ; // 2行目1文字目freq表示
EEPROM.put( FREQ_AD, freq1 ); // freq data into EEPROM
Serial.println("freq written");
delay(500);
mode=1;
break;
}
case 6:{ // STEP written
LCD_Disp ( 0, 1, spdisp) ; // 2行目1文字目space表示
EEPROM.put( FSTEP_AD, fstep ); // fstep data 100kHz for EEPROM
LCD_Disp ( 0, 1, spdisp) ; // 2行目1文字目spacep表示
delay(500);
LCD_Disp ( 0, 1, stepdisp) ; // 2行目1文字目step表示
Serial.println("fstep written");
delay(500);
mode=2;
break;
}
case 7:{ // MEMORY write
LCD_Disp ( 0, 1, mdisp) ; // 2行目1文字目m表示
EEPROM.put( MCHAN0 + memo_ad*4, freq1); // Write FREQ data on defined EEPROM
delay(500);
LCD_Disp ( 0, 1, spdisp) ; // 2行目1文字目space表示
delay(500);
LCD_Disp ( 0, 1, mdisp) ; // 2行目1文字目mem表示
Serial.println("memory write=");
Serial.println( mdisp);
mode=3;
delay(500);
break;
}
case 4:{ // Manual step SCAN
scandisp[1] = 0x30 | (scan_ad/10) ;// display scan chan
scandisp[2] = 0x30 | (scan_ad%10) ;
LCD_Disp ( 0, 1, scandisp ) ;
EEPROM.get( MCHAN0 + scan_ad*4, freq1); // read out MEM frequency
if (freq_0 == freq1) break;
Dsp_Disp();
freq_0=freq1;
if (if_mode==1) freq_0=freq1+10700000 ; // IFモード時は10.7MH上位を発振
set_freq(freq_0);
freq_0=freq1;
break;
}
}
if(mode==0) mode=1;
// led
digitalWrite(led_pin, k=!k ); // Led blinked
// もしロータリーエンコーダーが変化したのなら、モードに応じて
// freqの増減、step周波数の増減、指定メモリーchの増減を行う
re_result = r.process();
if (re_result ) { // Left 0x20 ? Right 0x10?
Serial.println(re_result == DIR_CW ? "Right" : "Left");
Serial.println(mode);
if ((mode == FREQ) && (re_result == 0x10 ) ) { // clockwise FREQ
freq1 = freq1 + fstep;
if(freq1 > (long) 200000000) { // 200MHz -> 100MHz
freq1 = (long) 100000000;
}
freq_0=freq1;
if (if_mode==1) freq_0=freq1+10700000 ; // on IF mode 10.7MH upper
set_freq(freq_0);
Dsp_Disp();
freq_0=freq1;
digitalWrite(led_pin, k=!k ); // #13 LED on/off in turn;
}
else if ((mode == FREQ) && (re_result == 0x20) ) { //counter clockwise FREQ
freq1 = freq1 - fstep;
if(freq1 < 100000000) { // 100MHz->200MHz
freq1 = 200000000;
}
freq_0=freq1;
if (if_mode==1) freq_0=freq1+10700000 ; // on IF mode 10.7MH upper
set_freq(freq_0);
Dsp_Disp();
freq_0=freq1;
digitalWrite( led_pin, k=!k ); // #13 LED on/off in turn
}
else if ((mode == STEP) && (re_result == 0x10) ) { // clockwise STEP
if (fstep == 25000) fstep=100; // 25000-->100
fstep = fstep*10;
if (fstep > 10000000) fstep=100; // 100-->1000
if (fstep == 100) fstep=25000; // 100-->25000
Step_Disp();
digitalWrite( led_pin, k=!k ); // #13 LED on/off in turn
}
else if ((mode == STEP) && (re_result == 0x20 )) { // counter clockwise STEP
if (fstep == 25000) fstep=100; // 25000-->100
fstep = fstep/10;
if (fstep < 100) fstep=10000000; // 100-->1000
if (fstep == 100) fstep=25000; // 100-->25000
Step_Disp();
digitalWrite( led_pin, k=!k ); // #13 LED on/off in turn
}
else if ((mode == MEMORY) && (re_result == 0x10 )) { // clockwise STEP
memo_ad ++ ;
if (memo_ad > 49) memo_ad = 0;
mdisp[1] = 0x30 | (memo_ad/10) ;
mdisp[2] = 0x30 | (memo_ad%10) ;
LCD_Disp ( 0, 1, mdisp) ; // #13 LED on/off in turn
}
else if ((mode == MEMORY) && (re_result == 0x20 )) {// Counter clockwise STEP
memo_ad --;
if (memo_ad < 0) memo_ad = 49;
mdisp[1] = 0x30 | (memo_ad/10) ;
mdisp[2] = 0x30 | (memo_ad%10) ;
LCD_Disp ( 0, 1, mdisp) ;
digitalWrite( led_pin, k=!k ); // #13 LED on/off in turn
}
else if ((mode == SCAN) && (re_result == 0x10 )) {// clockwise STEP
scan_ad ++;
if (scan_ad > 49) scan_ad = 0;
scandisp[1] = 0x30 | (scan_ad/10) ;
scandisp[2] = 0x30 | (scan_ad%10) ;
LCD_Disp ( 0, 1, scandisp) ;
digitalWrite( led_pin, k=!k ); // #13 LED on/off in turn
}
else if ((mode == SCAN) && (re_result == 0x20 )) {// Counter clockwise STEP
scan_ad --;
if (scan_ad < 0) scan_ad = 49;
scandisp[1] = 0x30 | (scan_ad/10) ;
scandisp[2] = 0x30 | (scan_ad%10) ;
LCD_Disp ( 0, 1, scandisp) ;
digitalWrite( led_pin, k=!k ); // #13 LED on/off in turn
}
}
s_meter_disp(); // Get AGC voltage & change S-meter
}
// i2c LCD & 4bit parallel LCD display commonly
void LCD_Disp ( char column, char line, char* charbuf) {
lcd.setCursor( column, line);
lcd.print( charbuf ) ;
}
//***** fstep displaying ***** 1kHz,10kHz,100kHz,1MHz,10MHz
void Step_Disp() { // display fstep on LCD
if (fstep == 1000) {
LCD_Disp ( 10, 0, " 1kHz ") ;
Serial.println("Step 1kHz ");
}
else if (fstep == 10000) {
LCD_Disp ( 10, 0, " 10kHz") ;
Serial.println("Step 10kHz ");
}
else if (fstep == 25000) {
LCD_Disp ( 10, 0, " 25kHz") ;
Serial.println("Step 25kHz ");
}
else if (fstep == 100000) {
LCD_Disp ( 10, 0, "100kHz") ;
Serial.println("Step 100kHz ");
}
else if (fstep == 1000000) {
LCD_Disp ( 10, 0, " 1MHz ") ;
Serial.println("Step 1MHz ");
}
else {
LCD_Disp ( 10, 0, " 10MHz") ;
Serial.println("Step 10MHz ");
}
delay(100);
}
//********* display frequency *********
char fdds[16];
void Dsp_Disp() { // Format freq data for display & display
char fdds1[16];
const unsigned char fdds2[] = "test";
LongToStr(freq1, fdds); // convert Long data 16 columns
Fdds_Space(fdds); // change leading "0" to space
fdds1[11] = '\0';
fdds1[10] = '\0';
fdds1[9] = 'z';
fdds1[8] = 'H';
fdds1[7] = 'M';
fdds1[6] = fdds[7];
fdds1[5] = fdds[6];
fdds1[4] = fdds[5];
fdds1[3] = '.';
fdds1[2] = fdds[4];
fdds1[1] = fdds[3];
fdds1[0] = fdds[2];
LCD_Disp ( 0, 0, fdds1) ;
if (if_mode==1) LCD_Disp ( 14, 1, "IF") ; // IF mode
}
// Long FREQ data changes to 10 digit numerics
void LongToStr(long dat, char *fm) {
long fmdat;
int i;
fmdat = dat;
for (i=0; i<11; i++) {
fm[10-i] =( fmdat % 10 ) | 0x30;
fmdat = fmdat / 10;
}
}
void Fdds_Space(char *fm) { // Reducing preceding zero into space
int i;
for (i=0; i<11; i++) {
if( fm[i] == 0x30) {
fm[i]=0x20;
}
else i=11;
}
}
void monit(long on_time, long off_time) { // #13 LED monit on_off
digitalWrite(led_pin, k=!k ); // Mon Led on/off
delay(on_time);
digitalWrite(led_pin, k=!k );
delay(off_time);
}
/* Frequency setting on Si5351a via i2c
Thanks Dr.Uebo
*/
void set_freq(unsigned long freqs) {
// freqs [Hz]
//
// fvco= fxtal*(a+b/c) ( a:15 -- 90, b:0 -- 1048575, c:1 -- 1048575 )
// freq= fvco /(a+b/c) ( a:4, 6--1800, b:0 -- 1048575, c:1 -- 1048575 )
//
// P1= 128*a + floor(128*b/c) - 512
// P2= 128*b - c*floor(128*b/c)
// P3= c
//
int k;
unsigned long M;
unsigned int R;
if(freqs<1500) freqs=1500; else if(freqs>280000000) freqs=280000000;
if( freqs> 150000000){M=4; R=0;}
else if(freqs>=63000000){M=6; R=0;}
else if(freqs>=27500000){M=14; R=0;}
else if(freqs>=13000000){M=30; R=0;}
else if(freqs>= 6500000){M=62; R=0;}
else if(freqs>= 3000000){M=126; R=0;}
else if(freqs>= 1500000){M=280; R=0;}
else if(freqs>= 700000){M=600; R=0;}
else if(freqs>= 330000){M=1280; R=0;}
else if(freqs>= 150000){M=1300; R=1;}
else if(freqs>= 67000){M=1500; R=2;}
else if(freqs>= 30300){M=1600; R=3;}
else if(freqs>= 14000){M=1800; R=4;}
else if(freqs>= 7000){M=1800; R=5;}
else if(freqs>= 3500){M=1800; R=6;}
else{M=1800; R=7;}
freqs*=M;
freqs<<=R;
unsigned long c=0xFFFFF;
unsigned long a=freqs/25000000;
unsigned long b=(long)((double)(freqs-a*25000000)*(double)c/(double)25000000);
unsigned long dd=(128*b)/c;
unsigned long P1=128*a+dd-512;
unsigned long P2=128*b-c*dd;
unsigned long P3=c;
//Set fvco of PLL_A
cmd_si5351(26,(P3>>8)&0xFF); //MSNA_P3[15:8]
cmd_si5351(27,P3&0xFF); //MSNA_P3[7:0]
cmd_si5351(28,(P1>>16)&0x03); //MSNA_P1[17:16]
cmd_si5351(29,(P1>>8)&0xFF); //MSNA_P1[15:8]
cmd_si5351(30,P1&0xFF); //MSNA_P1[7:0]
cmd_si5351(31,(P3>>12)&0xF0|(P2>>16)&0x0F);//MSNA_P3[19:16], MSNA_P2[19:16]
cmd_si5351(32,(P2>>8)&0xFF); //MSNA_P2[15:8]
cmd_si5351(33,P2&0xFF); //MSNA_P2[7:0]
// Set MS0, MS1
// a=M, b=0, c=1 ---> P1=128*M-512, P2=0, P3=1
if(M==4){
P1=0;
cmd_si5351(42,0); //MS0_P3[15:8]
cmd_si5351(43,1); //MS0_P3[7:0]
cmd_si5351(44,0b00001100); //0,R0_DIV[2:0],MS0_DIVBY4[1:0],MS0_P1[17:16]
cmd_si5351(45,0); //MS0_P1[15:8]
cmd_si5351(46,0); //MS0_P1[7:0]
cmd_si5351(47,0); //MS0_P3[19:16], MS0_P2[19:16]
cmd_si5351(48,0); //MS0_P2[15:8]
cmd_si5351(49,0); //MS0_P2[7:0]
cmd_si5351(50,0); //MS1_P3[15:8]
cmd_si5351(51,1); //MS1_P3[7:0]
cmd_si5351(52,0b00001100); //0,R1_DIV[2:0],MS1_DIVBY4[1:0],MS1_P1[17:16]
cmd_si5351(53,0); //MS1_P1[15:8]
cmd_si5351(54,0); //MS1_P1[7:0]
cmd_si5351(55,0); //MS1_P3[19:16], MS0_P2[19:16]
cmd_si5351(56,0); //MS1_P2[15:8]
cmd_si5351(57,0); //MS1_P2[7:0]
}
else{
P1=128*M-512;
cmd_si5351(42,0); //MS0_P3[15:8]
cmd_si5351(43,1); //MS0_P3[7:0]
cmd_si5351(44,(R<<4)&0x70|(P1>>16)&0x03);//0,R0_DIV[2:0],MS0_DIVBY4[1:0],MS0_P1[17:16]
cmd_si5351(45,(P1>>8)&0xFF); //MS0_P1[15:8]
cmd_si5351(46,P1&0xFF); //MS0_P1[7:0]
cmd_si5351(47,0); //MS0_P3[19:16], MS0_P2[19:16]
cmd_si5351(48,0); //MS0_P2[15:8]
cmd_si5351(49,0); //MS0_P2[7:0]
cmd_si5351(50,0); //MS1_P3[15:8]
cmd_si5351(51,1); //MS1_P3[7:0]
cmd_si5351(52,(R<<4)&0x70|(P1>>16)&0x03);//0,R1_DIV[2:0],MS1_DIVBY4[1:0],MS1_P1[17:16]
cmd_si5351(53,(P1>>8)&0xFF); //MS1_P1[15:8]
cmd_si5351(54,P1&0xFF); //MS1_P1[7:0]
cmd_si5351(55,0); //MS1_P3[19:16], MS0_P2[19:16]
cmd_si5351(56,0); //MS1_P2[15:8]
cmd_si5351(57,0); //MS1_P2[7:0]
}
cmd_si5351(165,0);
cmd_si5351(166,M);
cmd_si5351(177,0xA0); // Reset PLL_A. Mが変化(特にM=4からM>=6に変化)するときは必須かも…
}
// Si5351a set up at 100MHz
void si5351_init(void) {
cmd_si5351(183,0b10010010); // CL=8pF
cmd_si5351(16,0x80); // Disable CLK0
cmd_si5351(17,0x80); // Disable CLK1
set_freq(100000000); // 100MHz
cmd_si5351(177,0xA0); // Reset PLL_A
cmd_si5351(16,0x4F); // Enable CLK0 (MS0=Integer Mode, Source=PLL_A)
cmd_si5351(17,0x4F); // Enable CLK1 (MS1=Integer Mode, Source=PLL_A)
}
//レジスタに1バイトデータを書き込む。
void cmd_si5351(char Reg , char Data) {
Wire.beginTransmission(Si5351_ADDR);
Wire.write(Reg);
Wire.write(Data);
Wire.endTransmission();
}
// Function SW determining A0 port: function SW
// Vcc 2k SW1 330 SW2 630 SW3 1k SW4 Gnd
int function_key() {
ADCdata = analogRead(A0); // define sw as voltage
result = NONE ; //
// if ( abs(ADCdata - analogRead(A0)) <5 ) // To avoid chatter
// {
if (ADCdata < 50) { // SW4
result = FREQ ;
}
else if (ADCdata < 150) { // SW3
result = STEP ;
}
else if (ADCdata < 350) { // SW2
result = MEMORY ;
}
else if (ADCdata < 600) { // SW1
result = SCAN ;
}
else {
result = NONE ; // over 600 NONE
sw_pending=0; // 20201002
sw_result = NONE ; // 20201002
}
// }
return result ; // Switch not settled 20201002
}
unsigned char mode_define(unsigned char moded) {
if ( sw_result0 ) { // NONEでなかったらSW on
if (( sw_result0 != sw_result) & ( sw_result == NONE )) { // NONEから変化
time0 = millis(); // SWが変化した時間を覚える
moded = sw_result0; // sw shall be accepted
sw_pending=1; // Sw changed, and on pending.
sw_result = sw_result0; // Remember sw
return moded;
}
else{ // 前のスイッチから変化せず
time1=millis(); // 長押しチェックのために時間覚え
if ((( time1 - time0) > 800 )& sw_pending==1 ){ // 800ms超えた, sw shall be accepted as long pushed
moded = sw_result0 + 4 ; // 長押しモード受付、数字はそれぞれの4まし
sw_pending=0;
return moded;
}
}
}
return moded;
}
void s_meter_disp(){ // Pendig as debugging
char s_disp[11];
unsigned char i;
unsigned char s_value;
agc_volt = analogRead(SQUELTCH);
if (agc_volt<155) s_value=0;
else if (agc_volt<168) s_value=1;
else if (agc_volt<205) s_value=2;
else if (agc_volt<254) s_value=3;
else if (agc_volt<328) s_value=4;
else if (agc_volt<426) s_value=5;
else if (agc_volt<573) s_value=6;
else if (agc_volt<770) s_value=7;
else if (agc_volt<1000) s_value=8;
else s_value=8;
s_disp[0] = 0x53;
for ( i=0; i<9; i++){
if (s_value>i){ // i=0 s_value=1 set 1 S_MAX=8
s_disp[i+1] = 0xff;
}
else s_disp[i+1] = 0x20;
}
s_disp[9] = 0x0;
LCD_Disp ( 3, 1, s_disp) ;
}





{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.