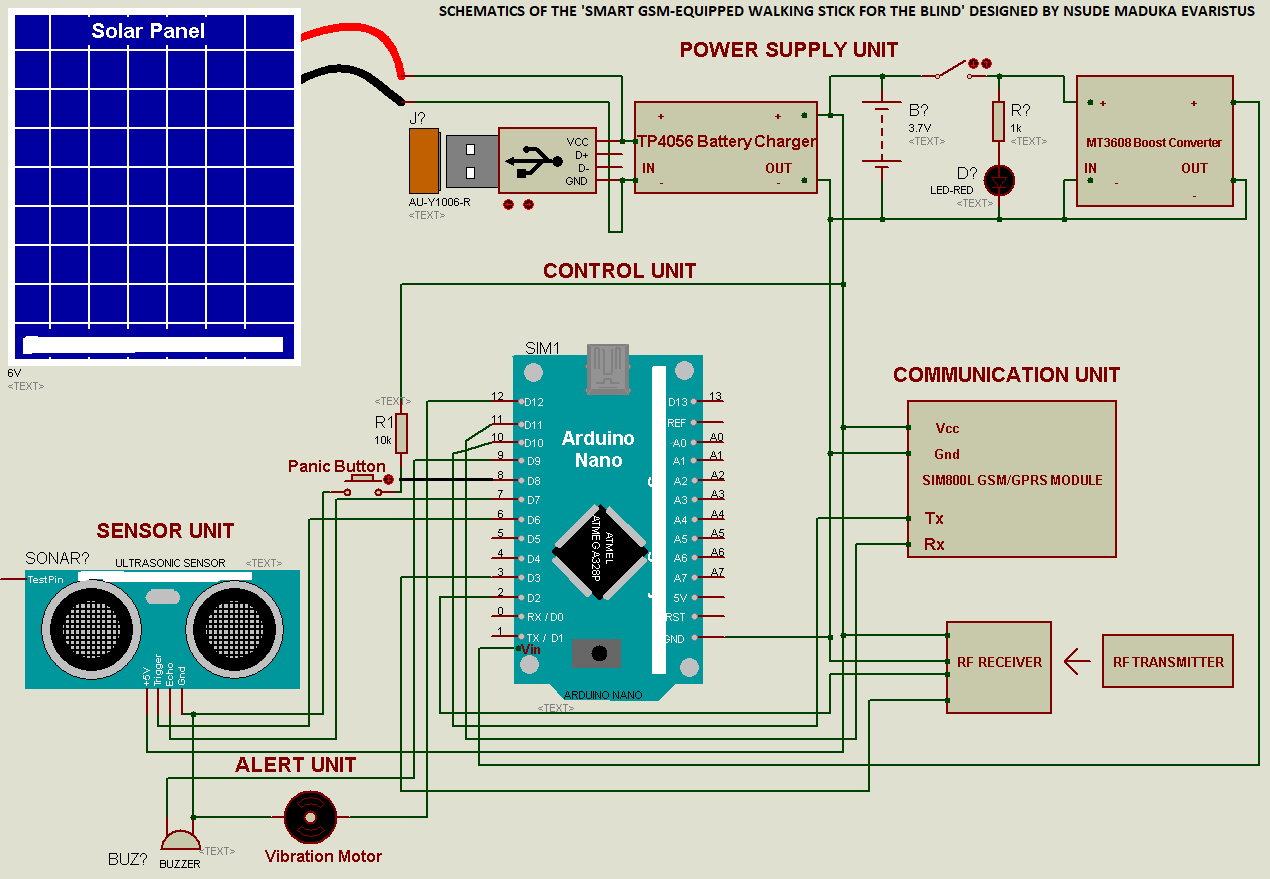
To help the blind navigate their environment safely without hitting obstacles, and be able to notify their caregivers in emergency situations, I developed this smart walking stick; an innovative device equipped with cutting-edge sensors and GSM technology. It uses the distance readings obtained with an HCSR04 ultrasonic sensor to detect obstacles on the way of the blind. Alarm and vibrator are activated when the blind person is in close proximity to an obstacle. If he accidentally hits an obstacle, the smart stick will start calling and texting his/her caregiver. The SMS sent has his Google map link of his location, which when clicked by the caregiver, brings out his location in Google map. The stick also has a panic button, which when pressed, causes the stick to start calling and texting the caregiver.
The stick also has RF receiver which is "listening" to signals coming from an RF transmitter remote controller held by the blind person. If the stick is misplaced, a button on the remote controller is pressed to turn on the buzzer on the stick. The blind person will then follow the sound to locate the smart stick.The stick has internal rechargeable battery which can be charged with a detachable solar panel. It can also be charged with utility power and generator.
It also has a water sensor attached to it so that the blind person is alerted when he is about stepping into water.
With all these features on the smart stick, the blind can safely navigate their surroundings without harm.
Demo of the Smart GSM-equipped Walking Stick for the Blind










{kind=link}
{kind=link}
Comments