

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
| ||||||
| ||||||
It was my first adventure for programming robotics when I used my background in computer version (Deep Learning) and created a simple mini bot.
When I begin, I’d like to tell you a little about my BG projects. I started my journey when Nvidia announced an embedded GPU computer in March 2019. I used to use Nvidia CUDA and RT for my work and projects. I’ve Nvidia Jetson TX2 (many thanks — NVIDIA Inception Program for this), I created on this board many exciting projects. This device has been fundamentally boarding in my product — Safety on the crossroads.
Now — my partner and I are working for adaptation for important road ceases.
Ok, it was a little cover for my personal goal — journey to robotics. I’ve found different resources for the programming of robotics. Arduino has stayed the first position; next was Raspberry Pi robotics — all of the theses embedded systems hadn’t GPU processing. I’ve understood — I need a faster computer — the more FPS for accurate servo motor works — it’s a critical robotics thing. The more frames per second, the accuracy predictions in the real world.
I’ve found the perfect resource for creating a first computer vision robot based on Jetson Nano and PyTorch. I’ve got some elementals for making this bot, and I’ve begun.
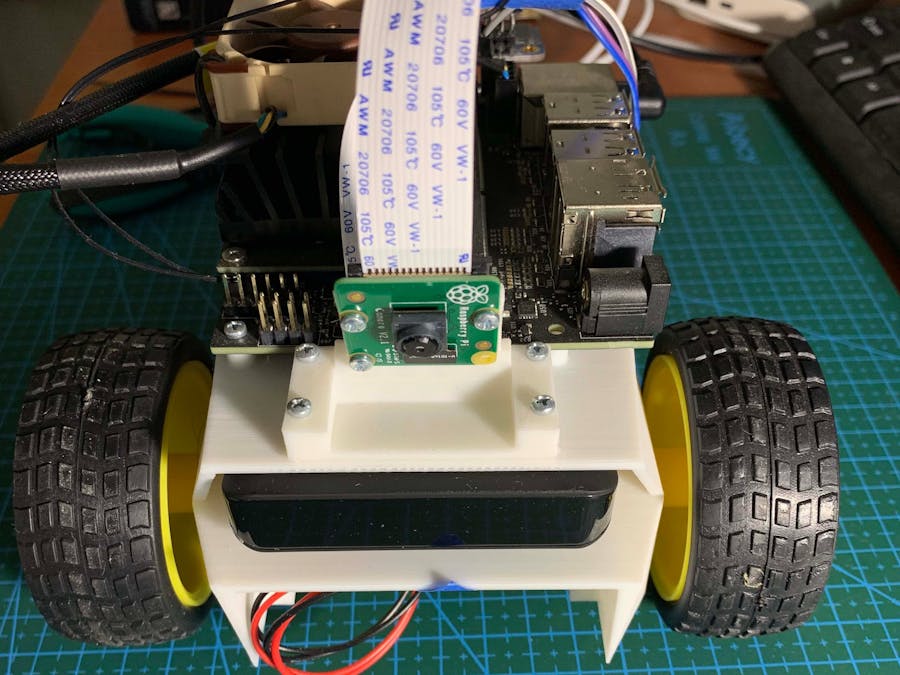
I have got a 3D printer, and I was printing the JetBot components myself. I used pure PLA filament and simple 3d printing settings in Cura slicer. So I’ve got the right robot of the frame for my JetBot. You can see it on my Timelapse video.
- Print time: 13 hours
- Post-production time: 15 min
- The material used: 125 grams
- PLA cost: ~ $4
The next steps of my journey were Hardware setup. Beneficial in this instruction.
- Hardware setup time: 2 hours
- Components cost: ~ $190
I’ve not gotten anything problem with connection components, and I believe you’ll be able to do it lightly. Just follow JetBot wiki instructions.
The next point of making bot was an SD card image for JetBot. I used a modified version of the JetBot SD card image. Use these 12 steps to create an environment. I didn’t modify dependence in env.
- Software setup time: 3 hours
The necessary step of the configuration was driver stepper, direction servo motors, and camera.
- Configuration time: 25–40 min
The exciting step was to Create your Datasets for Learning. For the first testing, I use toys, my little daughter, and layout my room. You can use any real environment to create your DataSets. PyTorch is an excellent framework for learning and deployment.
- Create Dataset time: 20 min
I’ve done learning Neural Network on Jetson Nano. However, I changed power mode on Jetson Nano and gave DC 5V / 4A from another adaptation. Next time you can back to Power Bank.
- Neural Network Learning by Jetson Nano: ~ 45 min (I had 70 images for Block class and 25 for Free class)
It was a fantastic time, and I think the result was excellent. I told you a short story. You’ll be able to apply, configuration, and change it on your fantasy and issues.
I’m telling this story (create and bought all components myself) without sponsoring an investment — just Thanks so much, Nvidia and JetBot Team.
Happy JetBotting :) 😊
Original story = https://medium.com/@rvjenya/computer-vision-of-robotics-nvidia-jetbot-ea3b8de145a9
Nvidia JetBOT Team
 Rvachov Yevgenii
Rvachov Yevgenii
Comments
Please log in or sign up to comment.