






Hardware components | ||||||
| × | 2 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
Software apps and online services | ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
Micropipettes are used to hold, poke, move, or mechanically test single cells. Depending on their shape and thickness, they can be used as force sensors, for cell aspiration method, for in-vitro fertilisation (IVF) or simply for injections of chemicals. While micropipettes can be easily custom mad, the motorised stages and the syringe pumps are expensive and hardly customisable.Open CM is an open framework for single cell micromanipulation. Our goal is, to produce an easily customisable, versatile tool for micropipettes. The framework is designed to be compatible with the system provided by USeeToo, which allows us to connect our system to cheap custom microscopes, enabling lots of new possible applications.
In order to start with motor control, of a preliminary xyz-stage, we use the MP6500 motor controler from Polulu, with a NEMA 8 motor.
We connect SLEEP, STEP and DIR to Digital IO's of the Open Smart board.
The VMOT and GND pins are connected to a battery and A1,A2,B1,B2 go to the motor. It is important to set the SLEEP permanently to logical one, or to connect it to a logic power supply. A good description of the motor driver carrier can be found here.
When using motor driver carriers, do always ensure, that every connected port (for instance MS1/MS2 or I1/I2) need to be given a High or Low value. Otherwise the motor may jitter. If these pins are not connected, they will be on a Low state.
Our motor drivers current limit can be set via I1 and I2, how to do that is nicely explained here.
First of all we wrote a XOD-programme to control a single motor. It sends multiple pulses to the STEP-pin of the motor controller, as long as a button is pressed. The direction is controlled by using two TOUCH-buttons on the OpenSmart Shield to set the step variable N to +1 or -1 and sending a 0 or 1 value to the DIR-pin of the controller.
A crucial step is to digital-write a HIGH value to the SLEEP-pin, otherwise the motor will not respond.
Here, we use the XOD stepper motor library nkrkv/stepdir.
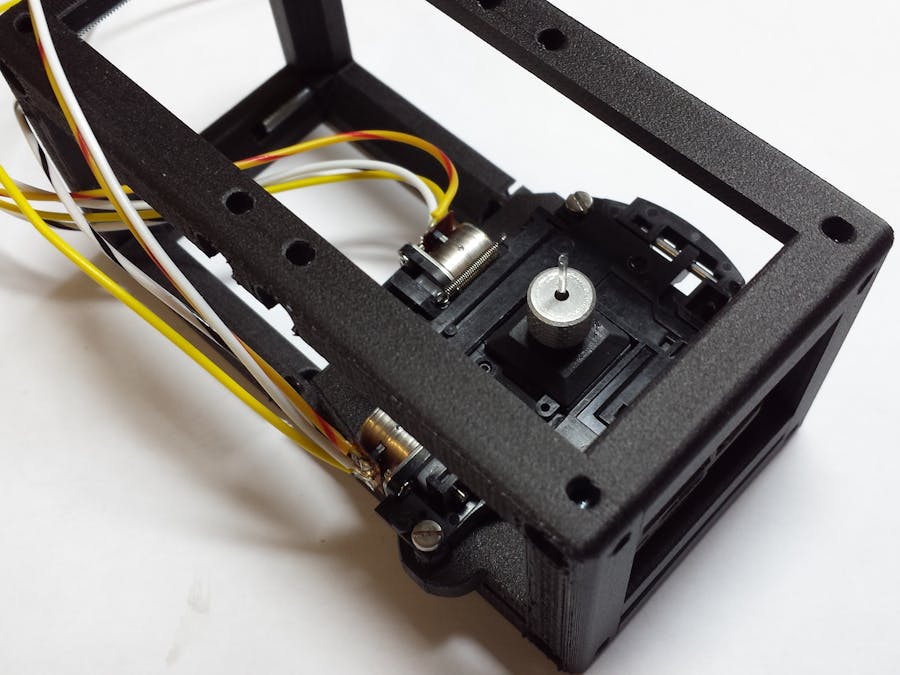
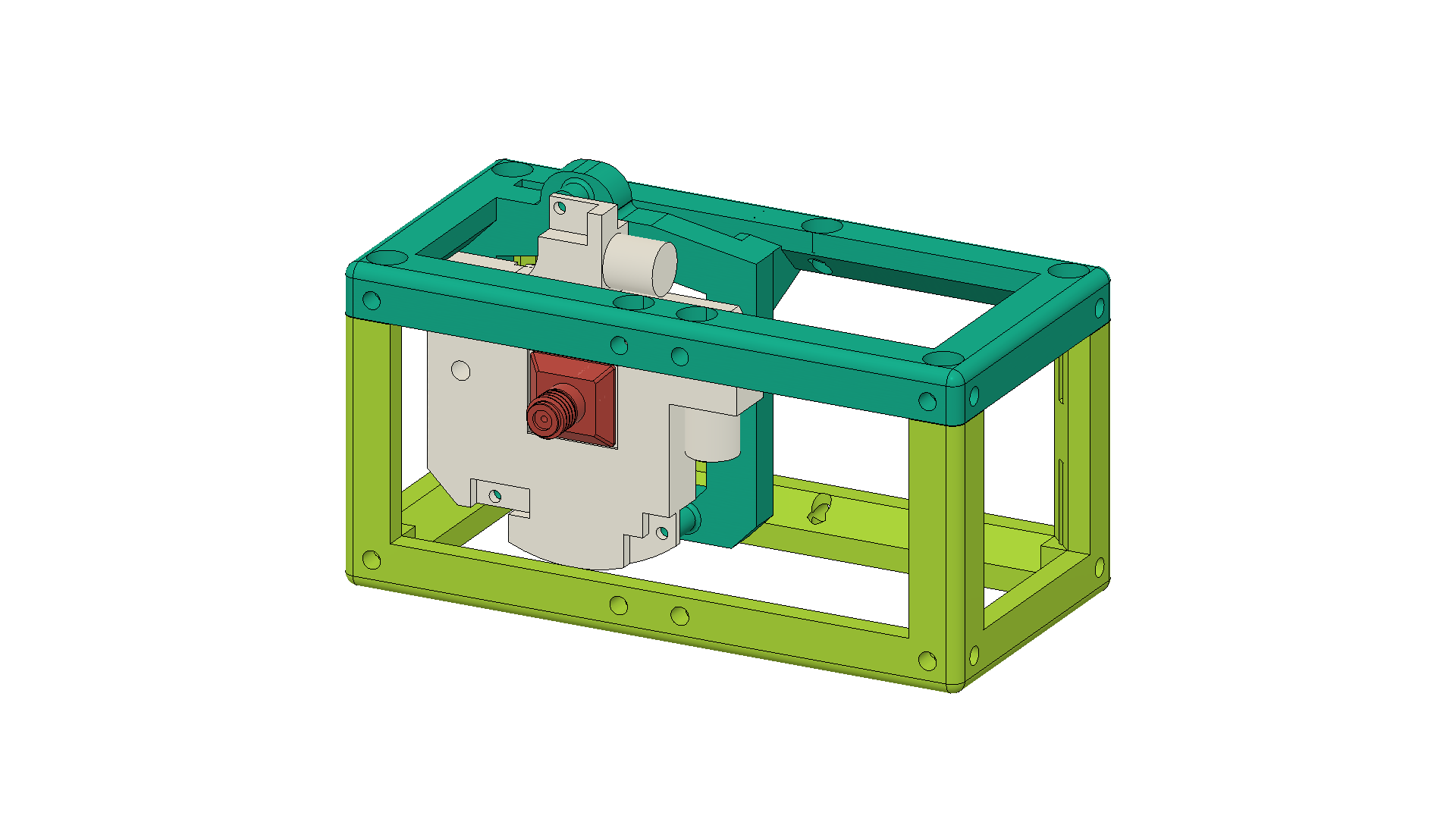
We designed a first micromanipulator, using the UC2 microscope cube-system.
Our outer cube consists of a 2x1 Cube with a customised Lid, containing a frame for the xy-stage. The inner frame of the xy stages can hold a pipette using two components: a pico-nozzle and a clamp. Our system should be compatible to the UC2 microscope, for example the smartphone microscope we built:
With a simple 2-axis joystick, which can be controlled like two potentiometers using an Arduino and XOD.
We thank David Page-Croft for his expertise and help in the machineshop
Moreover we acknowledge the insights, discussions and ideas from Benedict Diederich and Réne Lachmann from UC2.
We are looking forward to our ongoing collaboration.
Delmans, M. & Haseloff, J., (2018). μCube: A Framework for 3D Printable Optomechanics. Journal of Open Hardware. 2(1), p.2. DOI: http://doi.org/10.5334/joh.8
Lake, John R., Keith C. Heyde, and Warren C. Ruder. "Low-cost feedback-controlled syringe pressure pumps for microfluidics applications." PloS one12.4 (2017): e0175089. https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0175089
USeeToo, Jena, Germany
https://www.youtube.com/watch?v=JswW8BexnC4&feature=youtu.be








{kind=link}
Comments
Please log in or sign up to comment.