


First off, get familiar with EMIcorp's catalog of grippers, suction cups, and related components. Knowing whats available, and where to get them can be one of the most difficult parts of building a robot tool. EMIcorp does a great job at providing an abundant supply of available, affordable, industrial robot EOATs and EOAT parts. You can build a simple suction-cup gripper for less than $50 including the vacuum-pump. A soft-gripper with industry-standard ISO-9409-1-50-4-M6 mountarm, 90deg fitting, and some 6mm tubing will add an extra couple hundred dollars to the project. It's still some of the best value-oriented robot tooling available, as a typical pre-made gripper EOAT usually costs a few thousand dollars.
You have some options when it comes to Vacuum Pumps. I'd recommend a $20 pump for hobby applications, something in the $100 ballpark for light commercial applications, and add an extra zero if you want something fully industrial.
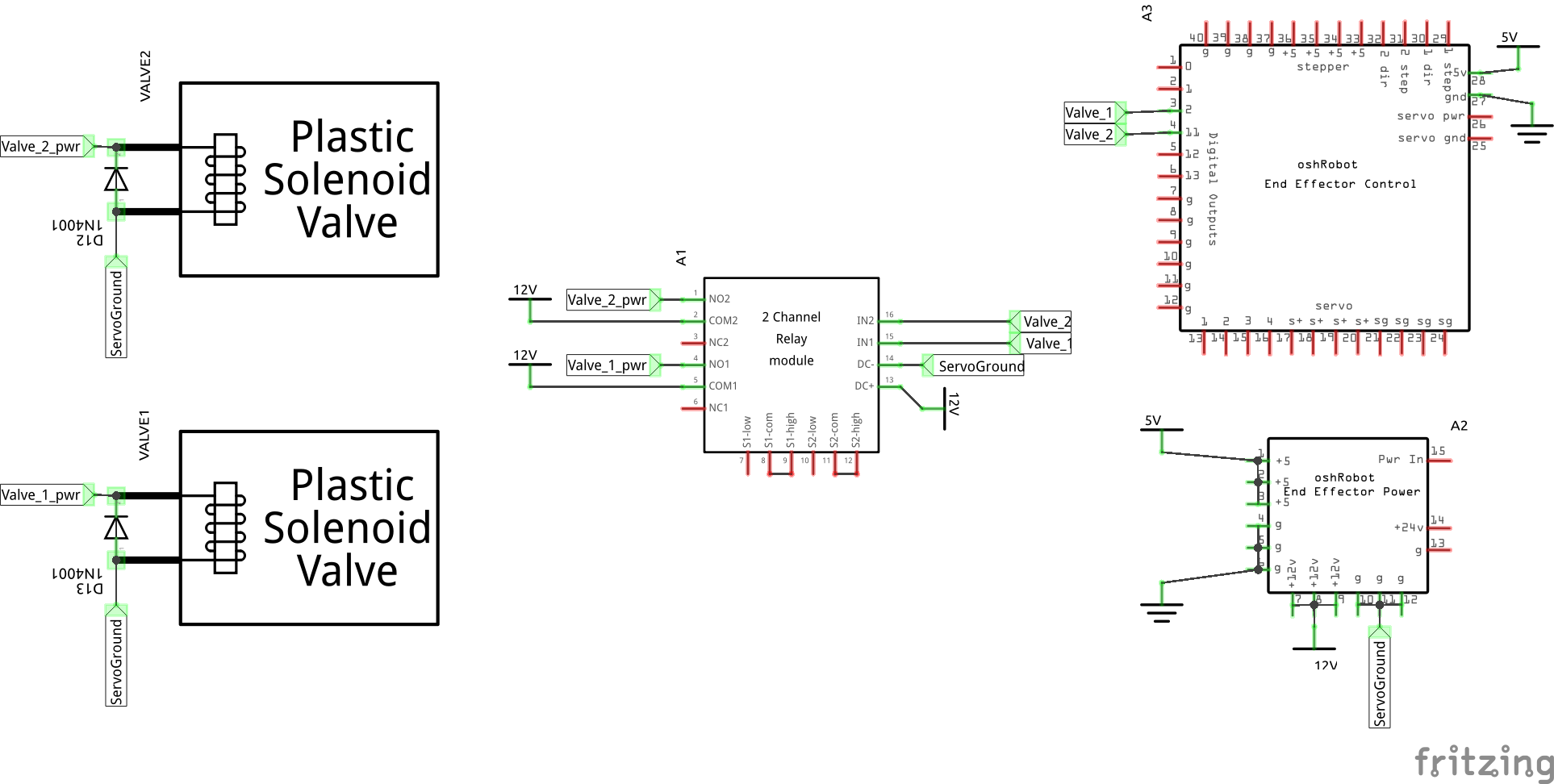
The Electronics / CircuitryAn oshRobot Apollo comes with a 5v and 12v power supply available to use on the end of the robot arm (the End Effector). It also comes with an Arduino Nano RP2040 Connect and control board. If you don't have an Apollo robot, I'm working on a Tutorial over on Arduino's website about how to build the Arduino control circuit. I'll add a link here when its published.
You'll need to purchase a Dual Relay Board and 2 Solenoids, and then wire them up as shown in this Fritzing Diagram.
Now that you've got the gripper built, and the control circuitry wired up, make sure you run some 6mm (or 1/4in) tubing between your vacuum pump, solenoids, and gripper.
There are two ways to program your gripper to pick things up and put them down. The first is using the Apollo App and Gamepad, which I'll cover a separate tutorial.
Alternatively, you can program your new helping hand is using G-code.
To Grip use:
M64 P2 ;Opens Vacuum SolenoidTo Release use:
M65 P2 ;Closes Vacuum Solenoid
M64 P11 ;Opens Air Solenoid
G64 P0.5 ;Waits half a second to let air flow back into gripper
M65 P11 ;Closes Air SolenoidAnd there you have it, a functional Robotic Gripper. Now program it to give you a pat on the back :).



{kind=link}
Comments
Please log in or sign up to comment.