


Hardware components | ||||||
 |
| × | 1 | |||
There is a new puppy in the family !!
PocketPilot is a smaller versions of the BBBmini (https://github.com/mirkix/BBBMINI), designed for use with PocketBeagle (https://beagleboard.org/pocket, a small version of BeagleBone Black). It provides a very small & light-weight open-source ArduPilot based autopilot / flight controller for quadcopter drones & robots.
Summary of Technical SpecificationsProcessor: Octavo Systems OSD3358 1GHz ARM® Cortex-A8512MB DDR3 RAM integratedIntegrated power management2×32-bit 200-MHz programmable real-time units (PRUs)ARM Cortex-M372 expansion pin headers with power and battery I/Os, high-speed USB, 8 analog inputs, 44 digital I/Os and numerous digital interface peripheralsmicroUSB host/client and microSD connectors
For test and initial developments, I have build a prototype using through-hole components & connectors, with sensor modules soldered directly on the breadboard. Since it doesn't need any SMD components, this is relatively easy to build, for an experienced builder by following this schematic:
Please note that there is no ESD protection for USB1 on the prototype, so be very carefull if you plan to use it. We will implement proper protection on a PCB release.
The initial flight test was performed on a 450 class quadcopter == Youtube videoPlease note this is flying indoor using optical flow (Lidar Lite V3 and PX4FLOW)
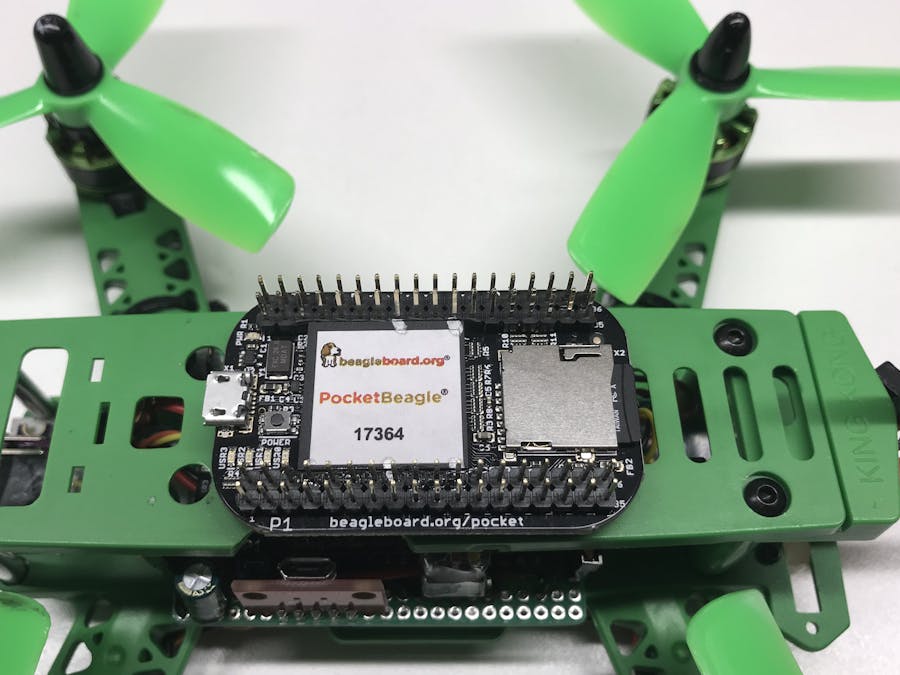
Integration on a 180 size quadcopter
In order to reflect the compactness of the PocketPilot , I have integrated the prototype into a KingKong 188 (Aliexpress) quadcopter with these components:4 x Multistar 1704 and DYS20 A ESC (Blheli) 5 Amp UBEC Micro Flysky PPM receiver900 Mhz Telemetry radio with Pigtail Spring Antenna3S Battery 1800 MAhVL53LX0 TOF RangeFinder
There is no special instructions for the build but you need a good UBEC with a steep voltage rising curve in order to get the PocketBeagle starting becauses of the power/battery management unit.
This is one of the first test on the KingKong, its flying Alt-Hold using the 7$ VlL53L0X TOF RangeFinder
LINUX and SOFTWAREA special thanks to Mirko Denecke for having adapted the BBBMINI ArduPilot code to the PocketPilot and Robert C Nelson for making the OS Images including: Linux Debian, Kernel with RT patch and the uboot overlays; allowing to define the IO using a configuration file, making the BeagleBone such a powerfull Linux Embedded Computer.
You can read the instructions here:
https://github.com/PocketPilot/PocketPilot/blob/master/SoftwareInstructions.md
MORE TO COME:
For anyone interested, we are planning to release a complete sensor cape for the PocketBeagle so stay tuned





Comments
Please log in or sign up to comment.