Demonstration of IoT using Tiva Launchpad and ESP8266 WiFi ModuleThe project aims to demonstrate the capability of Tiva Launchpad as an IoT device in controlling multiple sensors. The ESP8266 WiFI module is used to establish connection between the the Tiva Launchpad which is configured as an IoTserver and multiple host machines configured as the clients via the internet and using the TCP protocol. The sensors used in this project are servo motor and stepper motor which are remotely controlled by each of the host machines configured as clients.
Setup & Pin Configuration
ESP8266 Pin versus Tiva LaunchpadFirst link the ESP8266 VCC pin to CH_PD pin via shortcut VCC -> 3.3V, GND -> GND, RXD -> PB1, RST -> PD0, TXD -> PB0. To control servo please link the servo signal pin to PC5(pin).
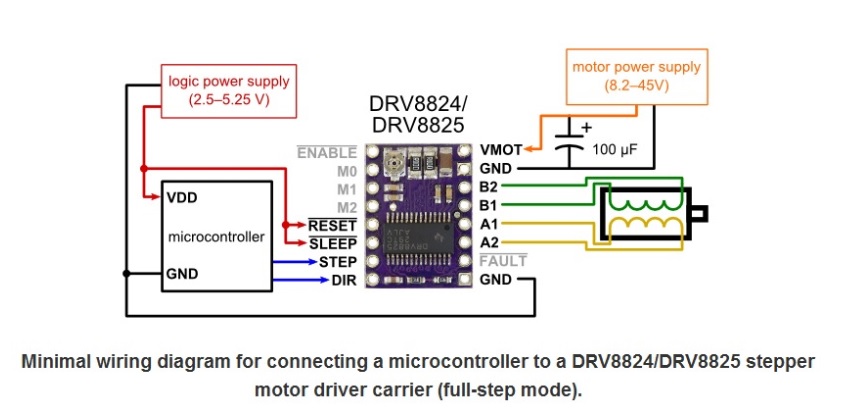
To control stepper motor please use port A for the pin connections i.e pins PA0-PA5















{kind=link}
Comments
Please log in or sign up to comment.