1st I got my hands on a second hand, but working, Hoverboard...
Since these things have been quite a trend a while back many are standing unused in a corner of a shed somewhere, they are pretty easy to come by on 2nd hand marketplaces online.
I got mine by simply placing a short message with a picture of a example Hoverboard of the kind I was looking for in a local 'Stuff wanted' Facebook group saying something in the line of: "Hey there ! Do you have a unused Hoverboard standing somewhere in a corner and do you want to make some quick cash? I am interested in buying your board! Reply below or send me a PM :) Sincerely, Peter Lunk"
Within a few days I had 3 replies, bought 1 functional board and 2 boards with malfunctions (but working motors)... They all cost me between 20 and 30 Euro a piece. I had to order a 42V 2A Hoverboard charger for 15 Euro's since all came without.
In this project: We'll start by learning about the board and it's hardware and build a 1st 3-wheel test robot-platform. Later I will add 2 more Hoverboard-wheels to make it a more stable 4WD platform... (stay tuned hit follow !)
Goal: Make use of the hoverboard hardware to create a robotics-platform that can be controlled either from RC-Transmitter or over rx-tx serial from Arduino or Raspberry pi.
2nd hand Hoverboard 30 Euros without charger but working.
Taking a 1st look at the innards of this Hoverboard... On this side we discover the 10S 36V 4Ah 5C Lipo battery-pack, and one of the two side-sensor-boards.
1st thing to do is to unplug this main powersource to prevent any mishaps... Be carefull what you touch! the capacitors of the main controller board may still hold charge !!
Underside view of one side of the hoverboard.
On this side we find the Mian-Controller board, and the otherone of the two side-sensor-boards.
Underside view of the Other side of the Hoverboard.
Removing the Battery-Pack: Carefully unscrew the screws that hold down the battery caging and remove the battery. !!! -> Since we don't know the state of this battery treat it with care and put it in a safe place untill we test it later on....
The 10S 36V 4Ah 5C Battery-Pack free from it's enclosure.
Extracting the Two side Sensorboards: Next we can carefully unplug the cables leading to the two sensorboards located on either side of the Hoverboard. On some hoverboards these cableplugs have been glue-gunned in place to prevent them from coming loose when the board bumps and crashes into things while being used. If the Glue-Gun-glue is too hard to get it off easily you can warm it up with a hairdryer and then carefully pry it loose with some small pliers or tweezers.
Now we can remove the screws that hold the sensorboards in place and you should be able to lift them out easily once that's done.
The two sensorboards.are identical.
BELOW THIS POIT I NEED TO ADD MORE TEXT.... Stay tuned hit Follow at the bottom of this article ... for Updates !
More images and tear down instructions will follow....
After the full tear down this should be the parts you are left with these parts.
A video from later on in the project: Hit Follow to stay tuned for updates !
SUCCESS! RC-Control established (PWM)
What Do I want to make with this platform ? Not sure yet but making a Dalek seems tempting ;)
Dalek (Dr.Who TV-series)
"The Daleks (/ˈdɑːlɪks/ (About this soundlisten) DAH-leks) are a fictional extraterrestrial race of mutants principally portrayed in the British science fiction television programme Doctor Who. The Daleks were conceived by science-fiction writer Terry Nation and first appeared in the 1963 Doctor Who serial The Daleks, in shells designed by Raymond Cusick."
This repository implements Field Oriented Control (FOC) for stock hoverboards. Compared to the commutation method, this new FOC control method offers superior performance featuring:
reduced noise and vibrations
smooth torque output and improved motor efficiency. Thus, lower energy consumption
field weakening to increase maximum speed range
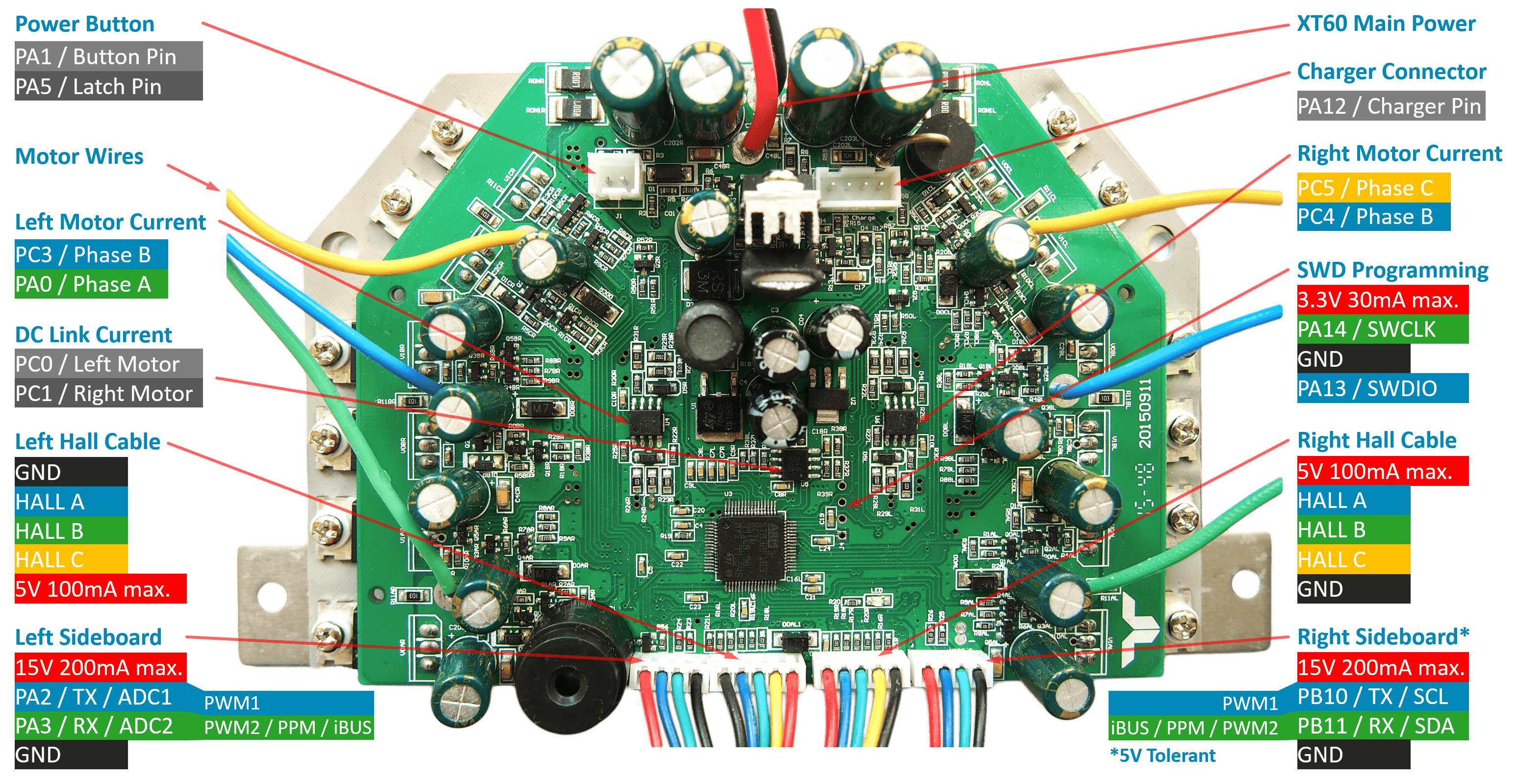
Schematics
Schematic and pin-out of the hoverboard connections
Schematic and pin-out of the hoverboard connections, by NiklasFauth. Pulled from the full schematic at: https://beta.ivc.no/wiki/images/d/d7/Hoverboard_schematic_full_reverse.pdf
Arduino Nano 5V example code for https://github.com/EmanuelFeru/hoverboard-firmware-hack-FOC
Arduino
Arduino Nano 5V example code From source: https://github.com/EmanuelFeru/hoverboard-firmware-hack-FOC
// *******************************************************************
// Arduino Nano 5V example code
// for https://github.com/EmanuelFeru/hoverboard-firmware-hack-FOC
//
// Copyright (C)2019-2020 Emanuel FERU <aerdronix@gmail.com>
//
// *******************************************************************
// INFO:
// • This sketch uses the the Serial Software interface to communicate and send commands to the hoverboard
// • The built-in (HW) Serial interface is used for debugging and visualization. In case the debugging is not needed,
// it is recommended to use the built-in Serial interface for full speed perfomace.
// • The data packaging includes a Start Frame, checksum, and re-syncronization capability for reliable communication
//
// CONFIGURATION on the hoverboard side in config.h:
// • Option 1: Serial on Right Sensor cable (short wired cable) - recommended, since the USART3 pins are 5V tolerant.
// #define CONTROL_SERIAL_USART3// #define FEEDBACK_SERIAL_USART3// // #define DEBUG_SERIAL_USART3// • Option 2: Serial on Left Sensor cable (long wired cable) - use only with 3.3V devices! The USART2 pins are not 5V tolerant!
// #define CONTROL_SERIAL_USART2// #define FEEDBACK_SERIAL_USART2// // #define DEBUG_SERIAL_USART2// *******************************************************************
// ########################## DEFINES ###########################define HOVER_SERIAL_BAUD 115200 // [-] Baud rate for HoverSerial (used to communicate with the hoverboard)#define SERIAL_BAUD 115200 // [-] Baud rate for built-in Serial (used for the Serial Monitor)#define START_FRAME 0xABCD // [-] Start frme definition for reliable serial communication#define TIME_SEND 100 // [ms] Sending time interval#define SPEED_MAX_TEST 300 // [-] Maximum speed for testing// #define DEBUG_RX // [-] Debug received data. Prints all bytes to serial (comment-out to disable)#include <SoftwareSerial.h>SoftwareSerial HoverSerial(2,3); // RX, TX
// Global variables
uint8_t idx=0; // Index for new data pointer
uint16_t bufStartFrame; // Buffer Start Frame
byte *p; // Pointer declaration for the new received data
byte incomingByte;byte incomingBytePrev;typedef struct{ uint16_t start; int16_t steer; int16_t speed; uint16_t checksum;} SerialCommand;SerialCommand Command;typedef struct{ uint16_t start; int16_t cmd1; int16_t cmd2; int16_t speedR_meas; int16_t speedL_meas; int16_t batVoltage; int16_t boardTemp; uint16_t cmdLed; uint16_t checksum;} SerialFeedback;SerialFeedback Feedback;SerialFeedback NewFeedback;// ########################## SETUP ##########################void setup(){ Serial.begin(SERIAL_BAUD); Serial.println("Hoverboard Serial v1.0"); HoverSerial.begin(HOVER_SERIAL_BAUD); pinMode(LED_BUILTIN, OUTPUT);}// ########################## SEND ##########################void Send(int16_t uSteer, int16_t uSpeed){ // Create command Command.start =(uint16_t)START_FRAME; Command.steer =(int16_t)uSteer; Command.speed =(int16_t)uSpeed; Command.checksum =(uint16_t)(Command.start ^ Command.steer ^ Command.speed); // Write to Serial
HoverSerial.write((uint8_t *)&Command, sizeof(Command));}// ########################## RECEIVE ##########################void Receive(){ // Check for new data availability in the Serial buffer
if(HoverSerial.available()){incomingByte= HoverSerial.read(); // Read the incoming byte
bufStartFrame=((uint16_t)(incomingByte) << 8)| incomingBytePrev; // Construct the start frame
}else{return;} // If DEBUG_RX is defined print all incoming bytes
#ifdef DEBUG_RX Serial.print(incomingByte);return;#endif // Copy received data
if(bufStartFrame== START_FRAME){ // Initialize if new data is detected
p=(byte *)&NewFeedback; *p++ = incomingBytePrev; *p++ = incomingByte;idx=2;}elseif(idx >=2&& idx < sizeof(SerialFeedback)){ // Save the new received data
*p++ = incomingByte; idx++;} // Check if we reached the end of the package
if(idx== sizeof(SerialFeedback)){ uint16_t checksum;checksum=(uint16_t)(NewFeedback.start ^ NewFeedback.cmd1 ^ NewFeedback.cmd2 ^ NewFeedback.speedR_meas ^ NewFeedback.speedL_meas
^ NewFeedback.batVoltage ^ NewFeedback.boardTemp ^ NewFeedback.cmdLed); // Check validity of the new data
if(NewFeedback.start == START_FRAME &&checksum== NewFeedback.checksum){ // Copy the new data
memcpy(&Feedback, &NewFeedback, sizeof(SerialFeedback)); // Print data to built-in Serial
Serial.print("1: "); Serial.print(Feedback.cmd1); Serial.print(" 2: "); Serial.print(Feedback.cmd2); Serial.print(" 3: "); Serial.print(Feedback.speedR_meas); Serial.print(" 4: "); Serial.print(Feedback.speedL_meas); Serial.print(" 5: "); Serial.print(Feedback.batVoltage); Serial.print(" 6: "); Serial.print(Feedback.boardTemp); Serial.print(" 7: "); Serial.println(Feedback.cmdLed);}else{ Serial.println("Non-valid data skipped");}idx=0; // Reset the index (it prevents to enter in this if condition in the next cycle)} // Update previous states
incomingBytePrev= incomingByte;}// ########################## LOOP ##########################unsigned long iTimeSend=0;int iTestMax= SPEED_MAX_TEST;int iTest=0;void loop(void){ unsigned long timeNow= millis(); // Check for new received data
Receive(); // Send commands
if(iTimeSend > timeNow)return;iTimeSend= timeNow + TIME_SEND; Send(0, SPEED_MAX_TEST - 2*abs(iTest)); // Calculate testcommand signal
iTest+=10;if(iTest > iTestMax)iTest= -iTestMax; // Blink the LED
digitalWrite(LED_BUILTIN, (timeNow%2000)<1000);}// ########################## END ##########################
RC-Receiver to Arduino Mega example 01
Arduino
This will sketch will read all 8 channels of a RC reciever and input the values via serial monitor. Programed for the Arduino MEGA 2560!!!
// Define Variables:
const int chA=22; //Constant variables relating to pin locations
const int chB=24;const int chC=26;const int chD=28;const int chE=30;const int chF=32;const int chG=34;const int chH=36;int ch1; //Varibles to store and display the values of each channel
int ch2;int ch3;int ch4;int ch5;int ch6;int ch7;int ch8;// the setup routine runs once when you press reset:
void setup(){ // initialize serial communication at 9600 bits per second:
Serial.begin(115200); // Set input pins
pinMode(chA, INPUT); pinMode(chB,INPUT); pinMode(chC,INPUT); pinMode(chD,INPUT); pinMode(chE,INPUT); pinMode(chF,INPUT); pinMode(chG,INPUT); pinMode(chH,INPUT);}//Main Program
void loop(){ // read the input channels
ch1= pulseIn (chA,HIGH); //Read and store channel 1 Serial.print ("Ch1:"); //Display text string on Serial Monitor to distinguish variables
Serial.print (ch1); //Print in the value of channel 1 Serial.print ("|");ch2= pulseIn (chB,HIGH); Serial.print ("Ch2:"); Serial.print (ch2); Serial.print ("|");ch3= pulseIn (chC,HIGH); Serial.print ("Ch3:"); Serial.print (ch3); Serial.print ("|");ch4= pulseIn (chD,HIGH); Serial.print ("Ch4:"); Serial.print (ch4); Serial.print ("|");ch5= pulseIn (chE,HIGH); Serial.print ("Ch5:"); Serial.print (ch5); Serial.print ("|");ch6= pulseIn (chF,HIGH); Serial.print ("Ch6:"); Serial.print (ch6); Serial.print ("|");ch7= pulseIn (chG,HIGH); Serial.print ("Ch7:"); Serial.print (ch7); Serial.print ("|");ch8= pulseIn (chH,HIGH); Serial.print ("Ch8:"); Serial.println (ch8);}








{kind=link}
Comments