





Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 2 | |||
 |
| × | 7 | |||
| × | 1 | ||||
 |
| × | 4 | |||
| × | 3 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
- Rainwater Harvesting System
Water is widely used for the cleaning of food manufacturing machinery and equipment, and it is crucial for producing food products. To reduce the overall consumption of fresh water in the food and beverage industry in terms of cleaning, an alternative source of water must be found. Hence, rainwater can be used as an alternative to fresh water being used for cleaning purposes to discourage the use of fresh water for cleaning usage so that the overall consumption of fresh water can be reduced.
- Water Quality Monitoring System
Since water will be used for consumption in food and beverage industry, the need of having a good quality check and filtering process for the water, must be worked on. Firstly, to prevent the customers to get any sickness from the consumption and also for sanitary purpose. by using sensors like pH sensor and turbidity, the goal might be achieved.
- Excessive Water Consumption Monitoring System
Excessive water consumption in the food and beverage industry can lead to high costs, environmental impact, and potential legal and regulatory compliance issues. Rainwater harvesting is an effective solution for reducing reliance on municipal water sources and conserving water. However, the amount of rainwater harvested was limited, and will be fully used. Once the harvested water was emptied, the water consumption will now be the tap water instead. Hence, it is essential to monitor excessive water consumption (tap water) to ensure efficient usage of rainwater harvesting and prevent wastage.
Solution:
To address excessive water consumption in rainwater harvesting systems, companies can implement a monitoring system that tracks water usage in real-time. This can be achieved using water flow sensors, water level sensors, and other IoT devices that can provide accurate data on water consumption.
- Water Leakage Detection System
Wastage of Water from Pipe Leakage
Leaks can have a significant impact on water usage and can result in higher water bills, increased water usage, and unnecessary water wastage. Therefore, it is important to regularly check plumbing systems for leaks and repair any leaks as soon as they are detected. Indirect costs include increased energy usage to pump and treat additional water, as well as damage to equipment and property caused by water damage. For instant, A small leak in a pipe that drips at a rate of one drop per second can waste up to 11, 000 litters of water per year.
Solution:
By implementing flow sensors, the industry can monitor water usage and detect any leaks or inefficiencies in the system. This information can be used to make adjustments in real-time, reduce water wastage, and improve overall water management. In the beverage industry, flow sensors can be used to monitor the water usage in the bottling process. By detecting any leaks or inefficiencies in the system, businesses can reduce water wastage and improve efficiency. This can help to conserve water, reduce operational costs, and support sustainable water management practices.
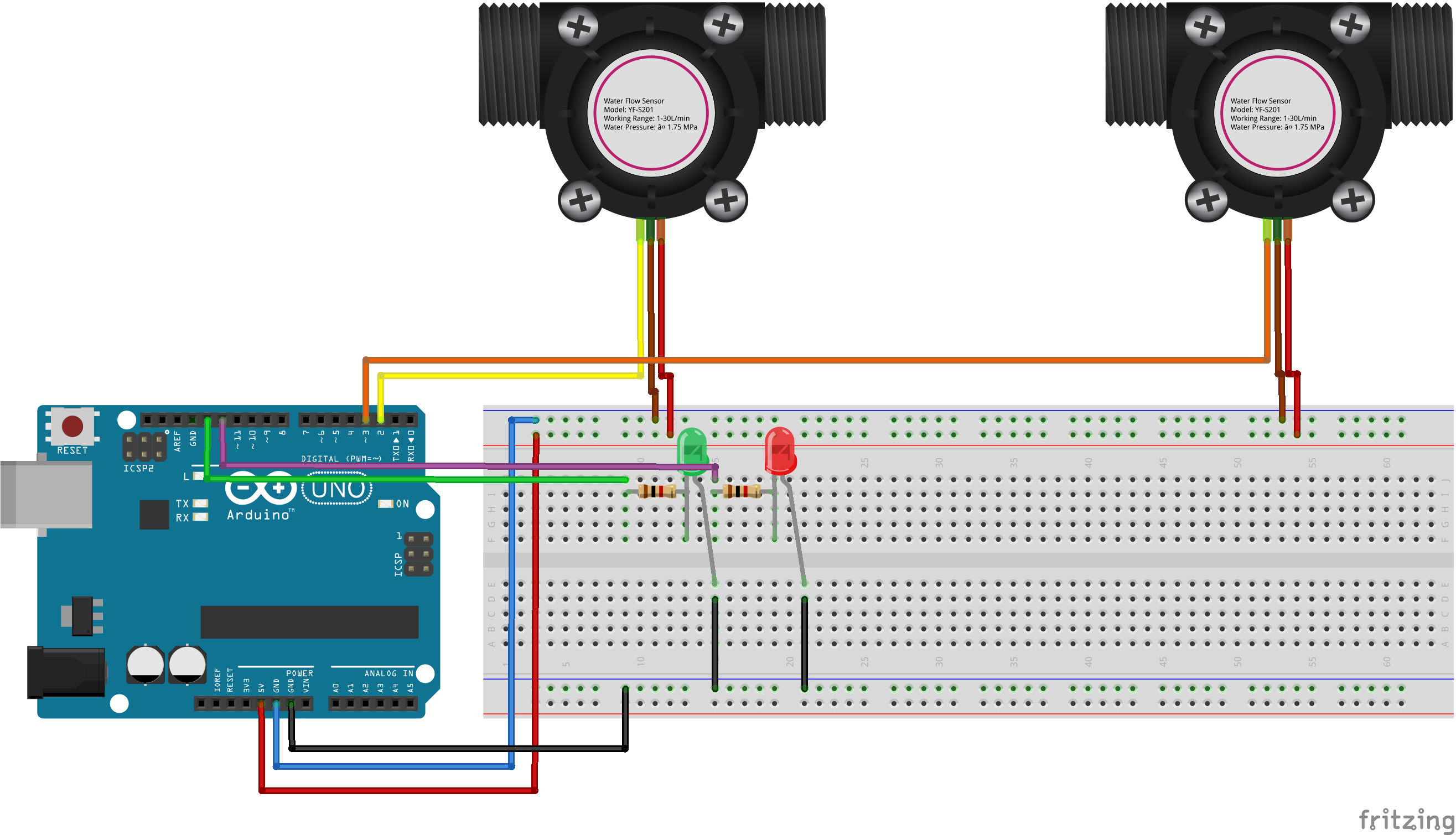
A hall effect flow sensor is used to detect the leaks in the water system. It operates by measuring changes in a magnetic field caused by the flow of water. The sensor then converts these changes in the magnetic field into electrical signals that can be processed and analysed to determine the flow rate of water. If there is a leak in the pipe, the flow rate of water will increase beyond normal levels, causing a corresponding change in the magnetic field that can be detected by the hall effect sensor. The sensor can then alert the system to the presence of a leak or abnormality in the system.
- GUI for overall system
Graphical User Interface (GUI) were very important for a developed system as it allowed users with zero knowledge of Arduino to monitor the system easily using devices such as laptops. The system using Arduino output and data collected were usually being shown and printed and can be view using applications such as “Arduino IDE”, and the controlling of the system often required user to understand the code in order to know how to control it. The monitoring of the data was less user friendly as well. Thus, GUI was needed for the monitoring of system and controlling the system easily. Users will be easier to understand the data collected by the Arduino and perform any necessary analysis on the data collected and showed on GUI easily.
Solution:
Create a Graphical User Interface (GUI) for monitoring and controlling the overall system developed, to increase user performance. It ensured users are able to monitor the data easily through GUI. Integrating all the system and allowing monitoring process with visual representation.
Rainwater Harvesting System(DARYL CHUNG JIA HUNG TP060584)
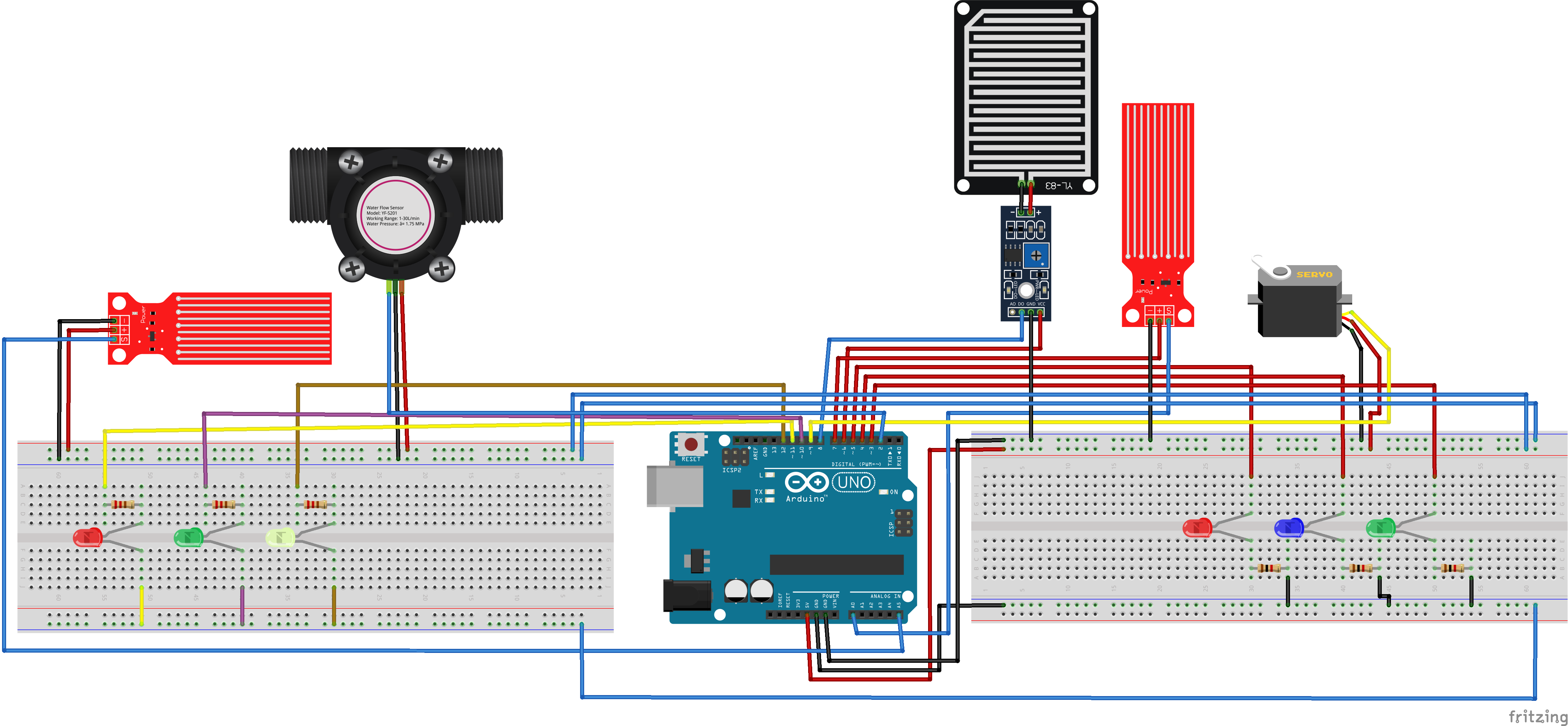
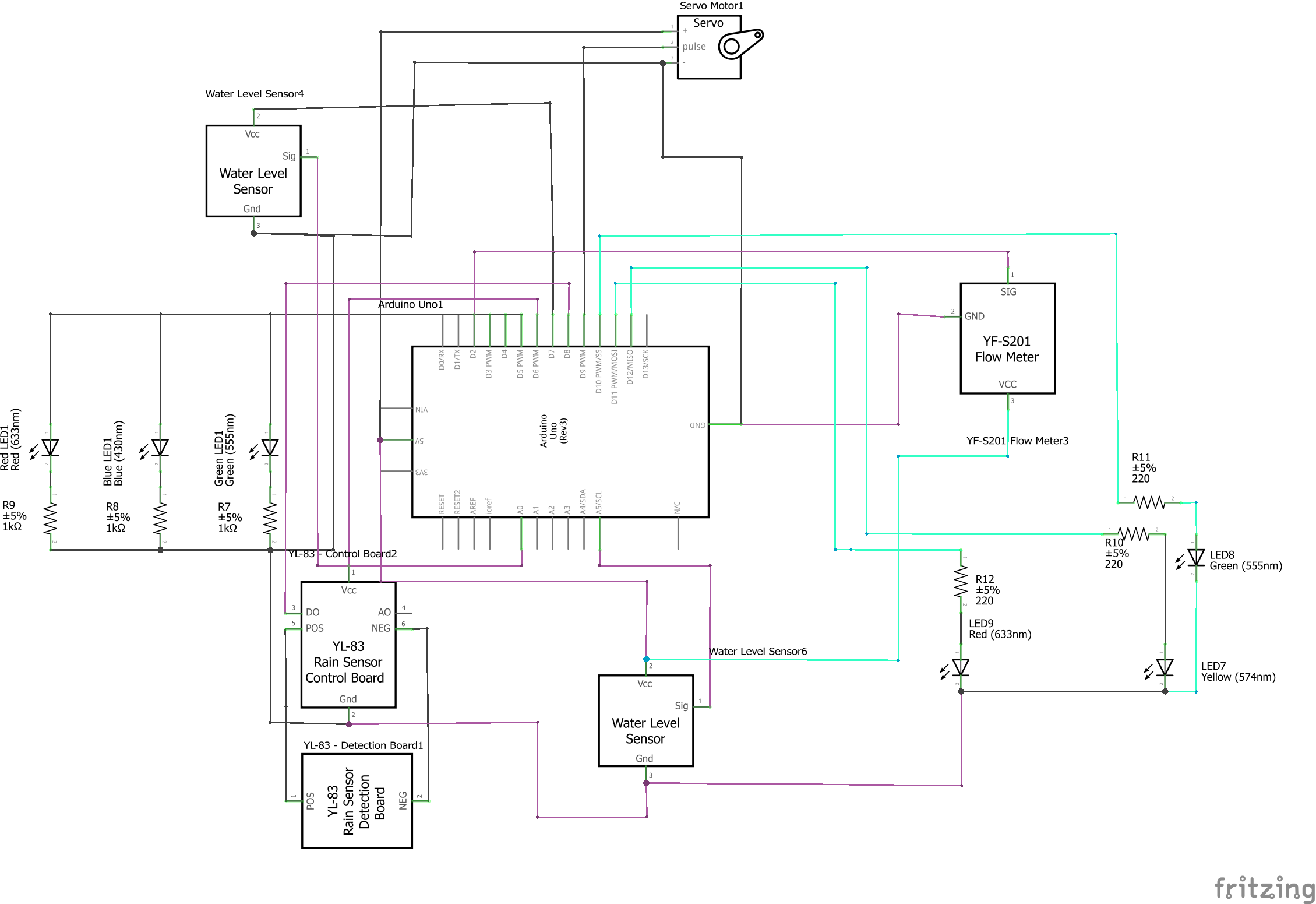
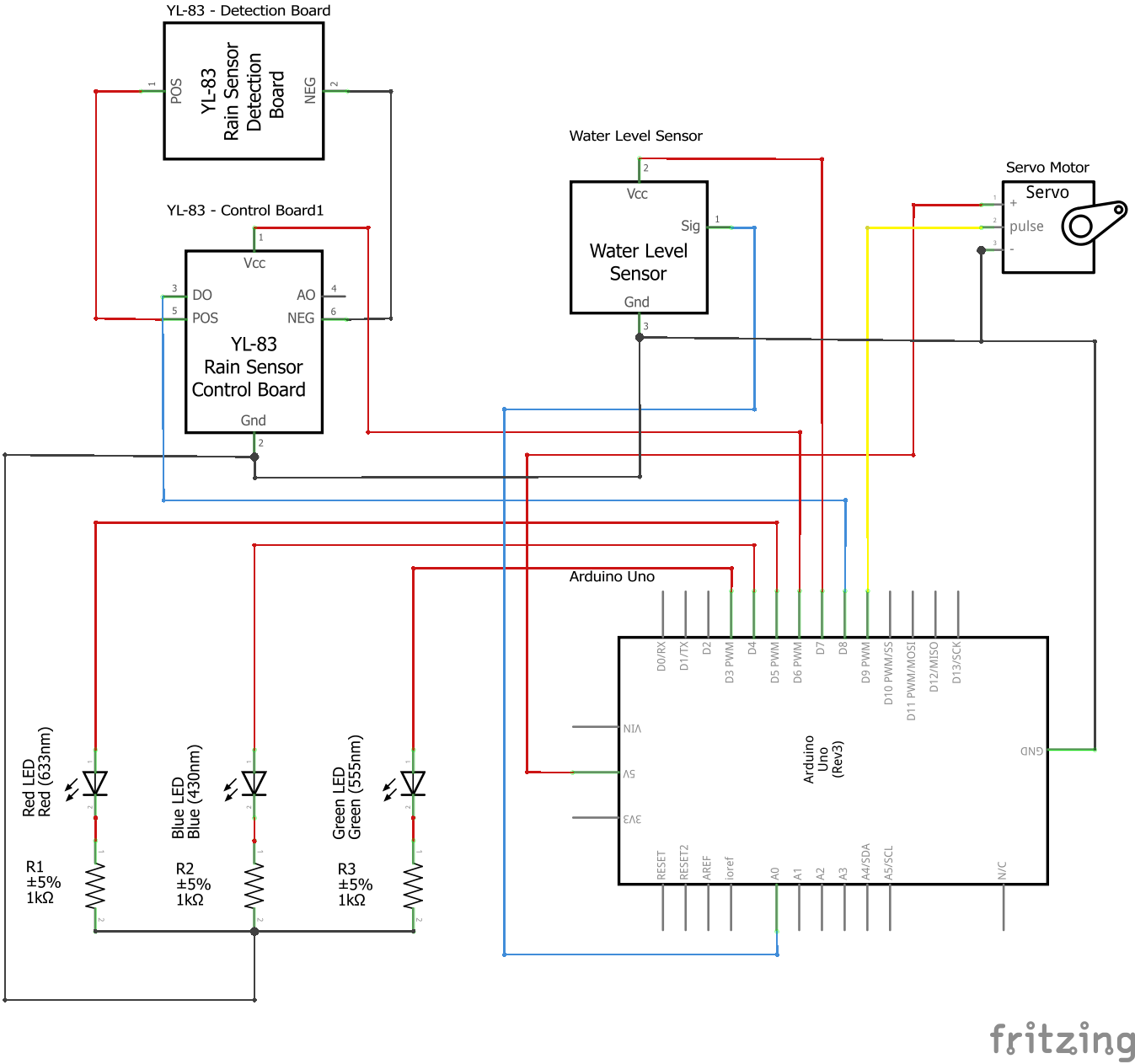
A rainwater harvester was assembled using several sensors, actuators, and an Arduino board. The main function for the rainwater harvester is to automatically expose or block the rainwater harvester to rain droplets to collect rainwater, by using a rainwater droplet sensor, and a servo motor to control the rainwater harvester’s lid. Additionally, if the rainwater harvester is full, the lid of the rainwater harvester will shut to prevent overcollection of rainwater to avoid over spillage, by using a water level sensor. Several LED lights were also added to indicate whether the rainwater harvester lid is opened or closed, and to indicate the full water level condition of the rainwater collector. Lastly, a manual control is added to allow the user to manually open or close the rainwater harvester’s lid for more freedom of control, by typing the commands into the serial command window in the Arduino software.
(CHOW SIET YAM DYLAN MING FOUNG TP062069)
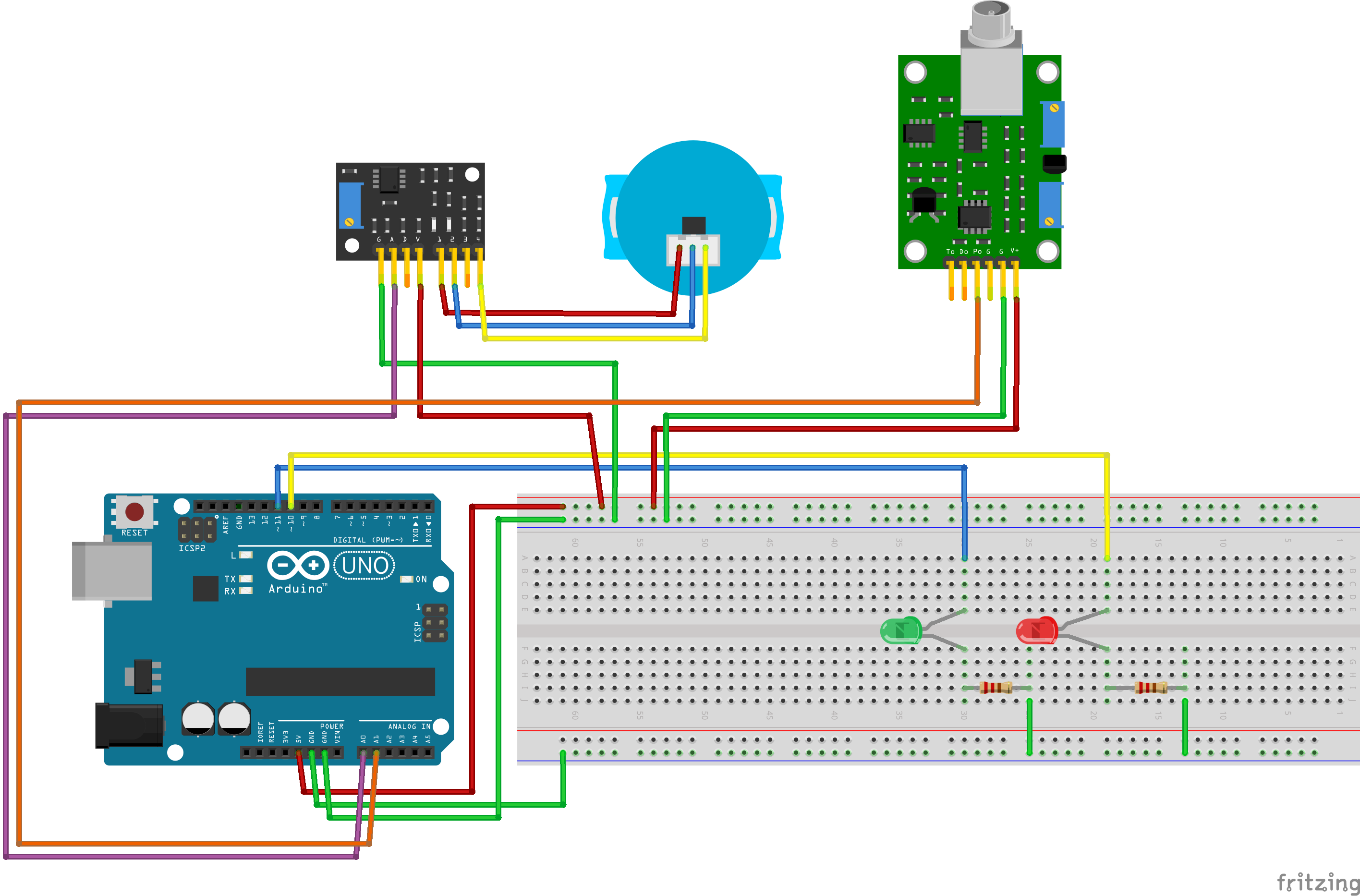
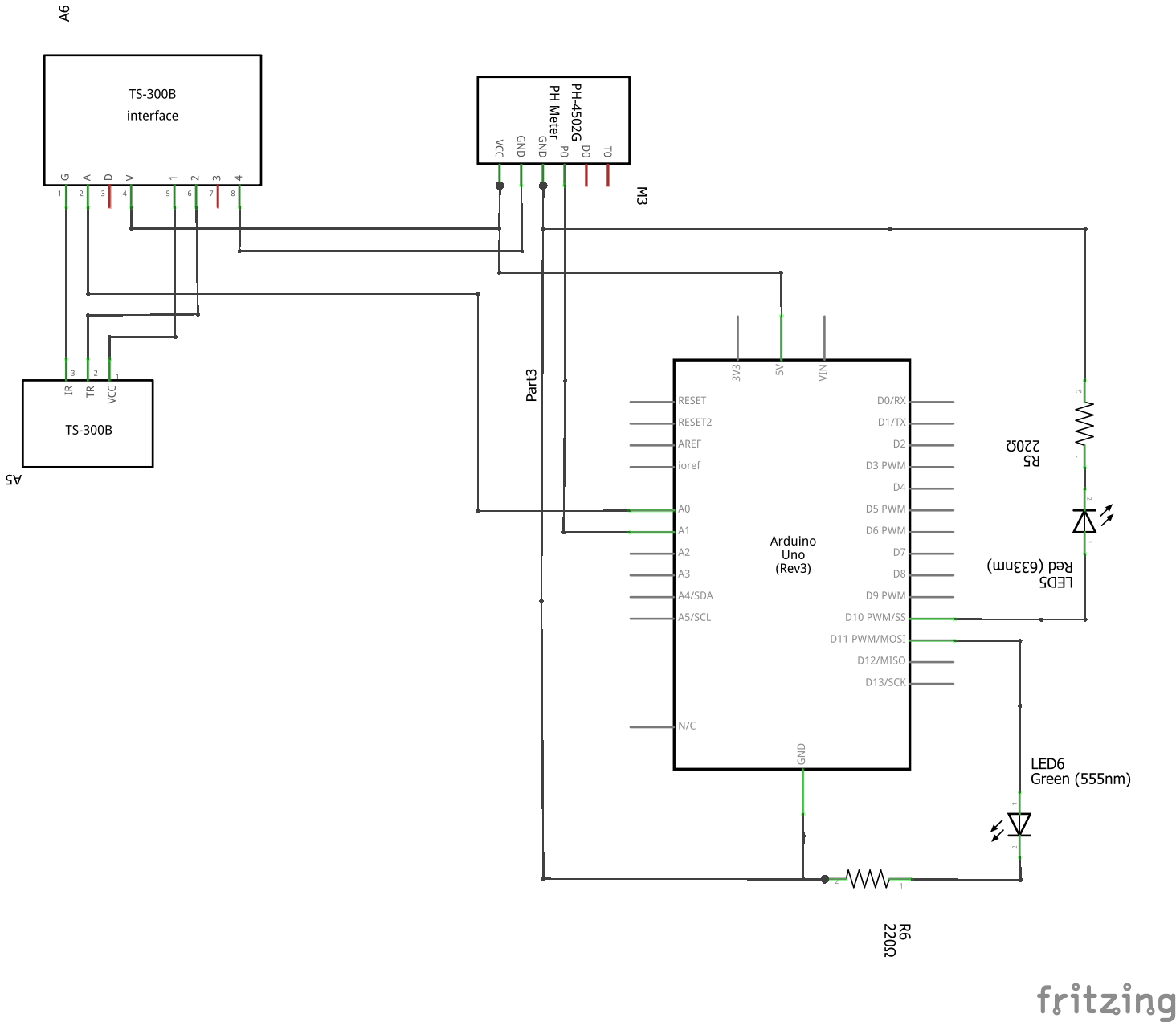
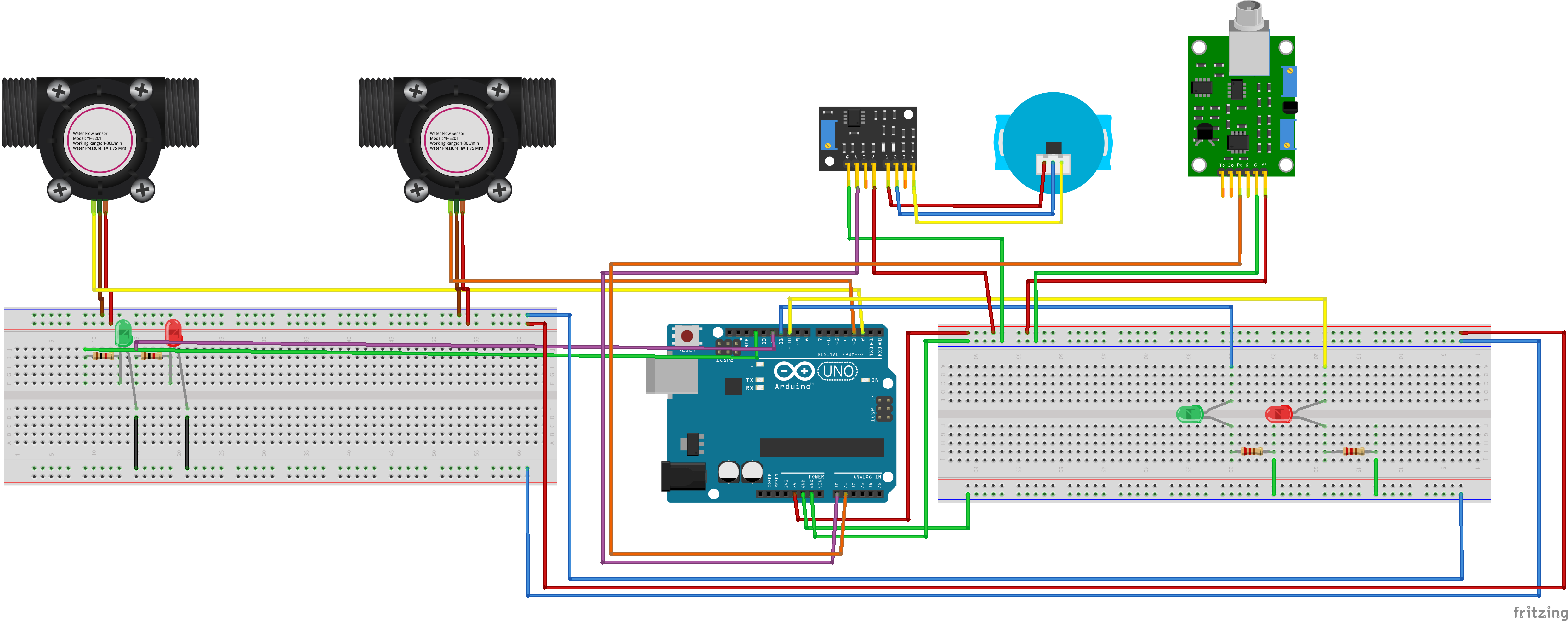
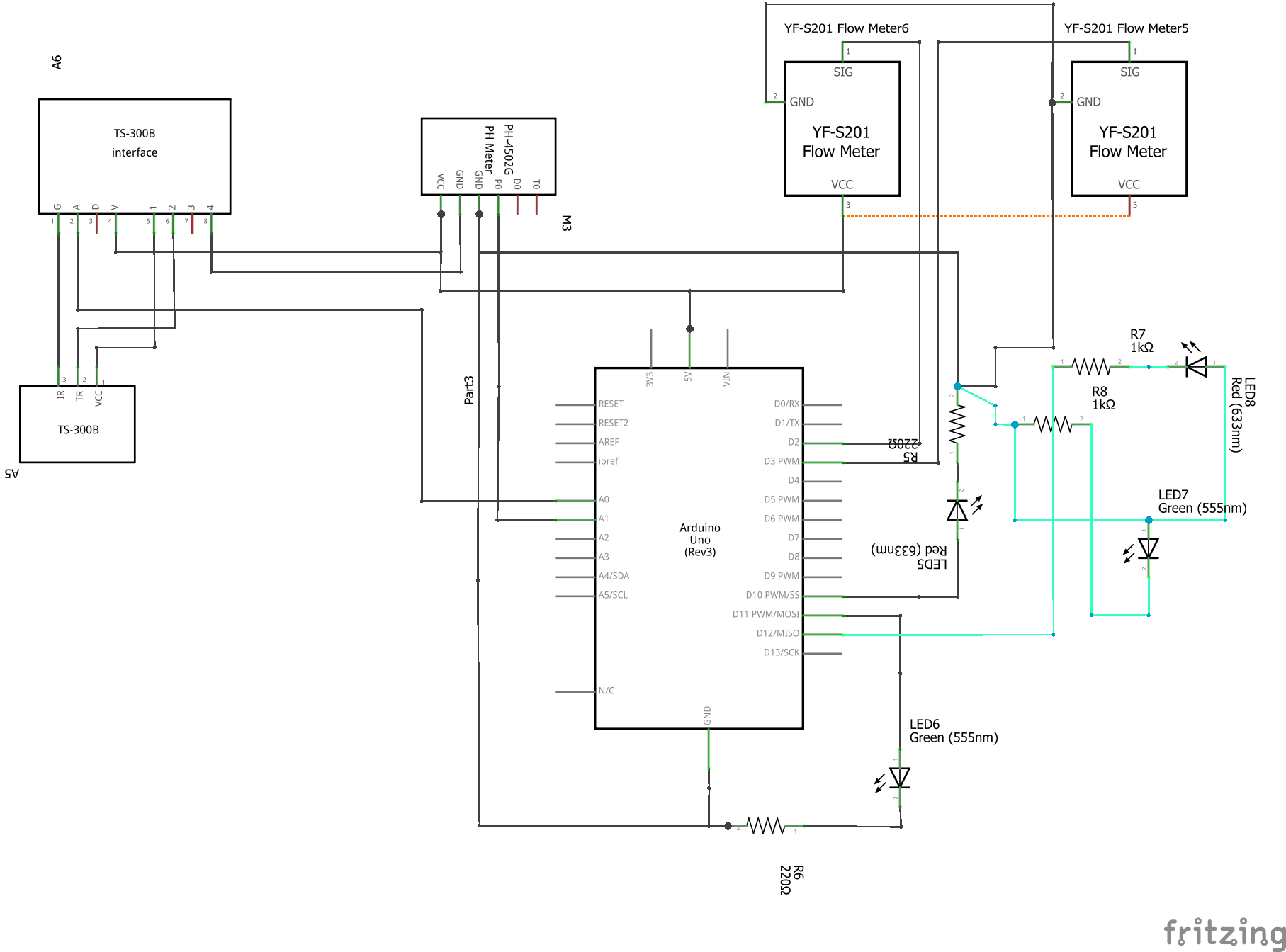
For monitoring the quality of water, 2 sensors are used: pH sensor and turbidity sensor. pH sensor is used to see whether the water was contaminated with any other substances and turbidity is used to check if the water is dirty. The reason for controlling is that due to the use of the water, the water must undergo tests to ensure that it is safe for consumption. LEDs are added as innovation to display the quality of water and indicate whether it is drinkable or not.
(CHEE WEN JING TP059605)
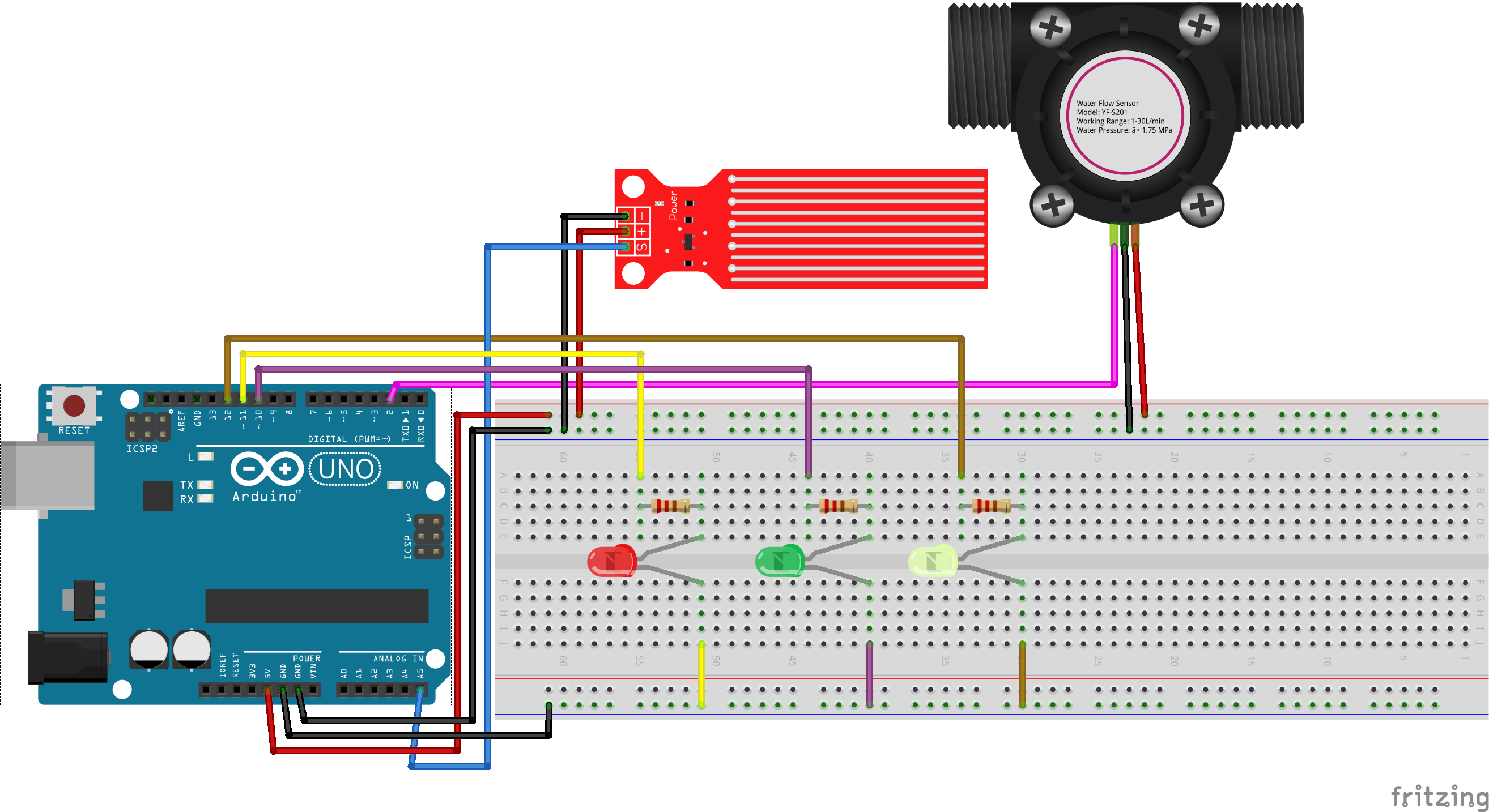
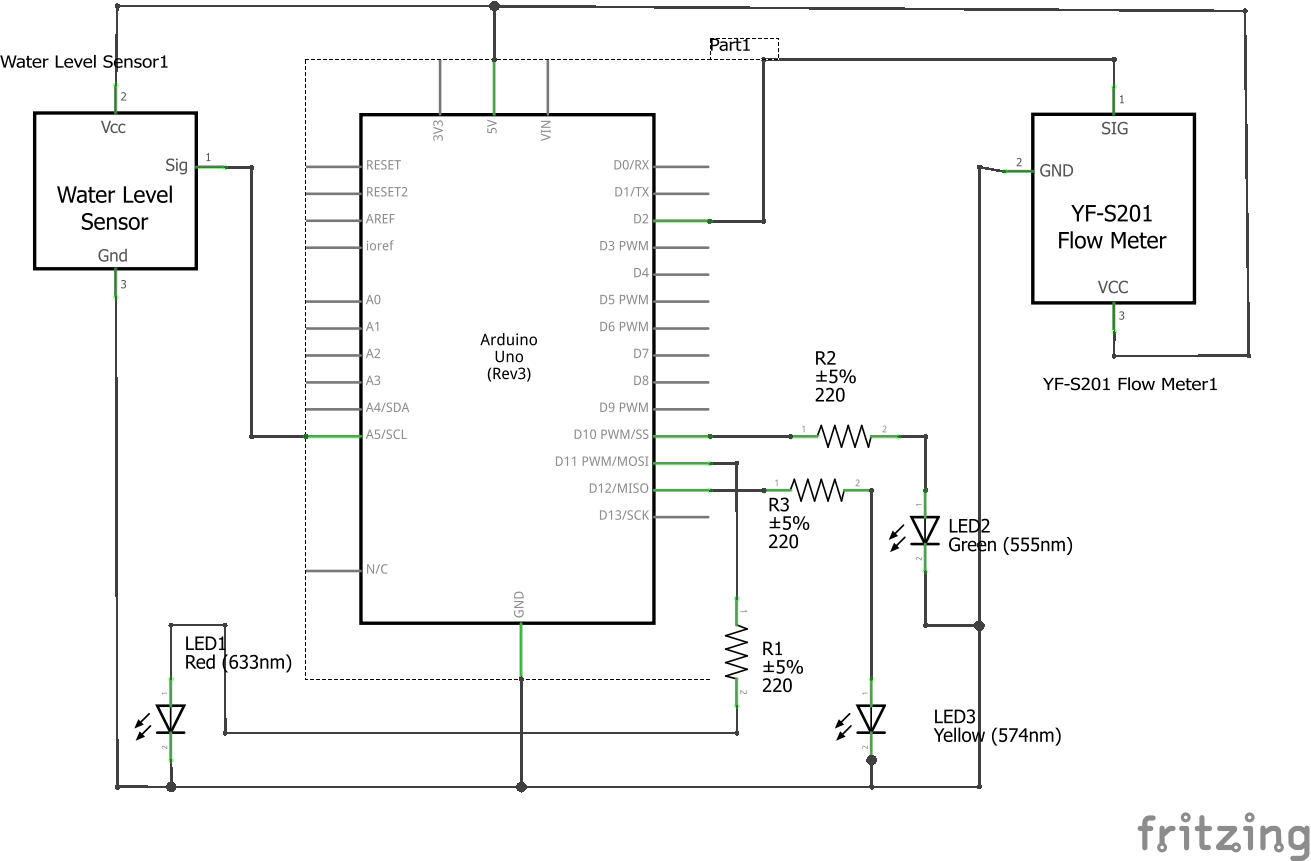
This objective is to monitor the usage of tap water when the amount of harvested rainwater runs out. Hence a water level sensor and a water flow sensor are implemented for accomplishing the jobs. The water level sensor is used to measure the water level existing inside the water tank, whereas the water flow sensor will be utilized to keep track of the amount of tap water consumed when turned on. Visual indications are shown with the aid of LEDs to let the user have a better grasp on the current situation. When the water level is not empty, the green LED lights up, indicating that the water is sufficient. On the contrary, both the red LED and yellow LED light up.
(CHEE MAN SHING SAMUEL TP060828)
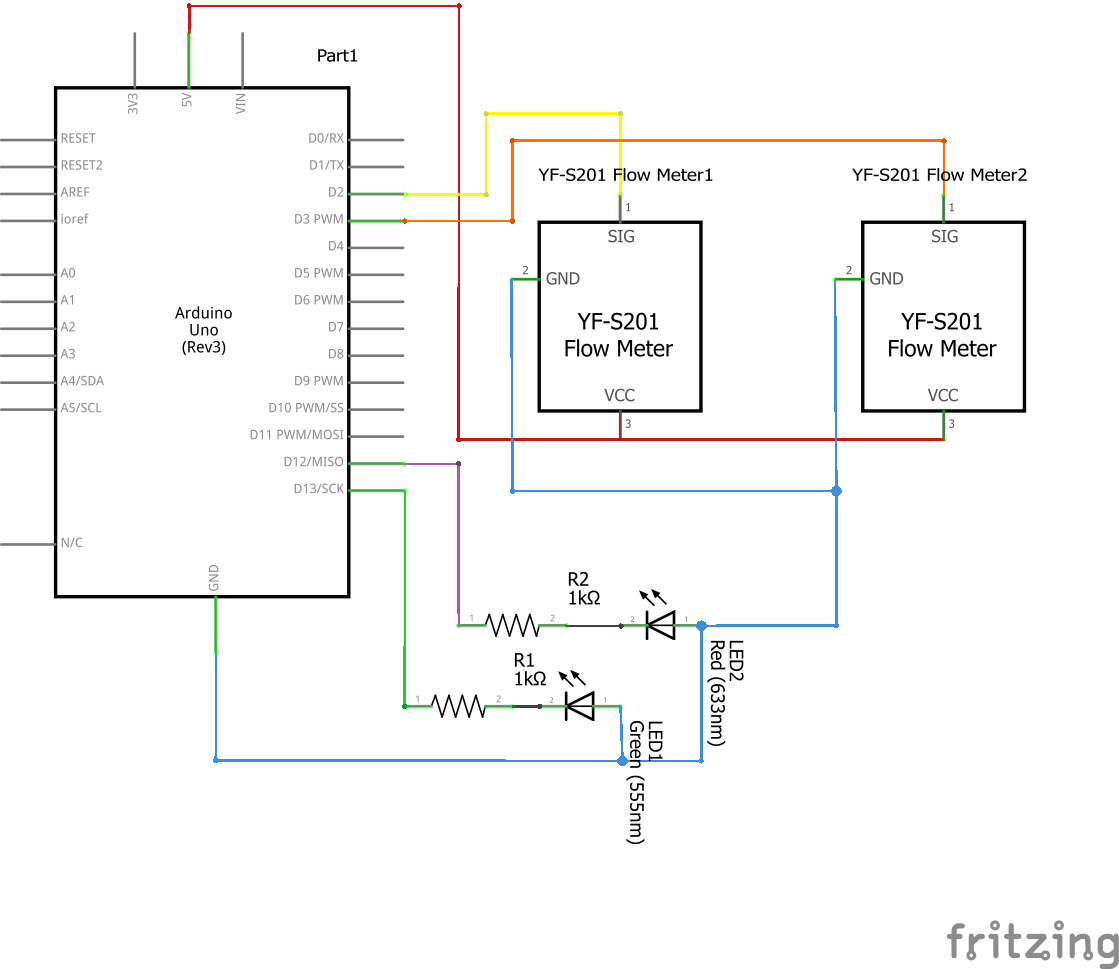
The prototype was designed with the aim of detecting and monitoring leakage of water from a pipe network by using 2 hall-effect sensors. The water flow sensors will send the data to an Arduino UNO to determine the flowrate of water in L/min at point A and point B. The difference in value will indicate the presence or absence of a leak in the pipe. Non-zero results suggest that there is a leak in the pipe while a zero result indicates no leakage. This is also represented visually using a RED and GREEN LED respectively. Once a leak is detected, necessary actions can be taken to eliminate the leak and hence reducing wastage of water.
(CHOW WEI PIN TP062490)
The objective of this part was to create a Graphical User Interface (GUI) for user to monitor and control the overall system. The important data of the overall system was being transmitted to devices such as laptop and the data was displayed using GUI. It allowed user to observe and analyze the information of the system. Most part of the system was for monitoring, where it monitored the rainwater level harvested, status of the rainwater harvesting system, water quality, excessive water usage, and water leakage detection system. The controlling part was just allow user to control the opening and closing of lid at of the rainwater storage container. The GUI created was exported as an ".exe" application and allowed it to be shared.
Rainwater harvesting system schematic


Water Quality Monitoring System - Schematic
Water Leakage Monitoring System Schematic
Excessive Water Consumption Monitoring System - Schematic
Rainwater harvesting + Excessive water consumption Schematic
Water Quality + Water Leakage Schematic









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.