// 2020/1/3 adapted by Zach
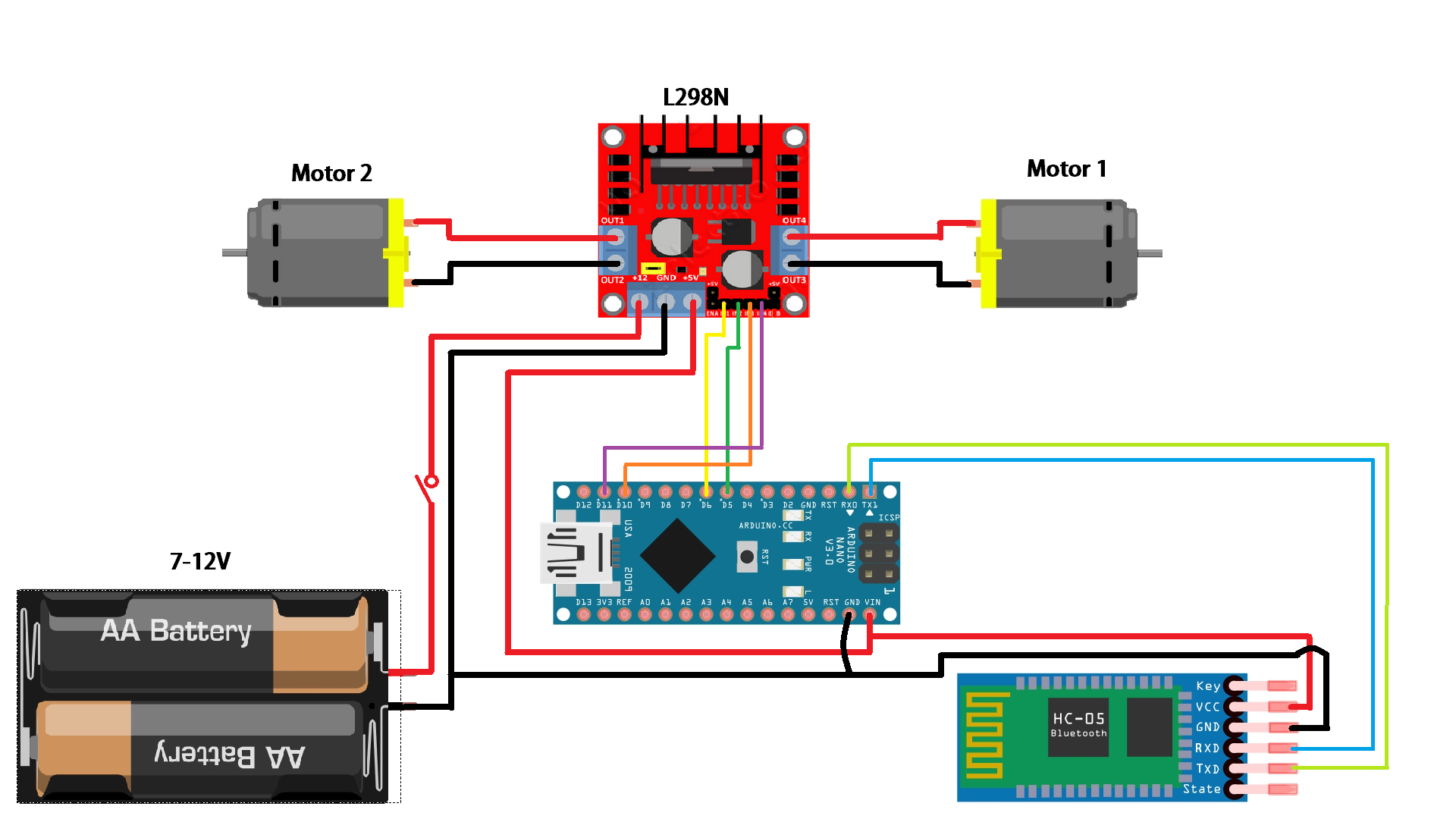
int outPin1 = 5; //motor1
int outPin2 = 6; //motor1
int outPin3 = 10; //motor2
int outPin4 = 11; //motor2
int red = 2;
int white=3;
char bt = 0; //BT
void setup()
{
Serial.begin(9600);
pinMode(outPin1,OUTPUT);
pinMode(outPin2,OUTPUT);
pinMode(outPin3,OUTPUT);
pinMode(outPin4,OUTPUT);
pinMode(red,OUTPUT);
pinMode(white,OUTPUT);
}
void loop()
{
if (Serial.available() > 0) //save incoming data to variable 'bt'
{
bt = Serial.read();
digitalWrite(white,HIGH);
if(bt == 'F') //move forwards
{
digitalWrite(outPin1,HIGH);
digitalWrite(outPin2,LOW);
digitalWrite(outPin3,LOW);
digitalWrite(outPin4,LOW);
digitalWrite(red,LOW);
}
else if (bt == 'B') //move backwards
{
digitalWrite(outPin1,LOW);
digitalWrite(outPin2,HIGH);
digitalWrite(outPin3,LOW);
digitalWrite(outPin4,LOW);
digitalWrite(red,HIGH);
}
else if (bt == 'S') //stop!!
{
digitalWrite(outPin1,LOW);
digitalWrite(outPin2,LOW);
digitalWrite(outPin3,LOW);
digitalWrite(outPin4,LOW);
digitalWrite(red,LOW);
}
else if (bt == 'R') // turn wheels right
{
digitalWrite(outPin3,LOW);
digitalWrite(outPin4,HIGH);
digitalWrite(outPin1,LOW);
digitalWrite(outPin2,LOW);
digitalWrite(red,LOW);
}
else if (bt == 'L') //turn wheels left
{
digitalWrite(outPin3,HIGH);
digitalWrite(outPin4,LOW);
digitalWrite(outPin1,LOW);
digitalWrite(outPin2,LOW);
digitalWrite(red,LOW);
}
else if (bt== 'G') //move forward left
{
digitalWrite(outPin1,HIGH);
digitalWrite(outPin2,LOW);
digitalWrite(outPin3,HIGH);
digitalWrite(outPin4,LOW);
digitalWrite(red,LOW);
}
else if (bt== 'I') //move forward right
{
digitalWrite(outPin1,HIGH);
digitalWrite(outPin2,LOW);
digitalWrite(outPin3,LOW);
digitalWrite(outPin4,HIGH);
digitalWrite(red,LOW);
}
else if (bt== 'H') //move backward left
{
digitalWrite(outPin1,LOW);
digitalWrite(outPin2,HIGH);
digitalWrite(outPin3,HIGH);
digitalWrite(outPin4,LOW);
digitalWrite(red,LOW);
}
else if (bt=='J') //move backward right
{
digitalWrite(outPin1,LOW);
digitalWrite(outPin2,HIGH);
digitalWrite(outPin3,LOW);
digitalWrite(outPin4,HIGH);
digitalWrite(red,LOW);
}
}
}











_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.