



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
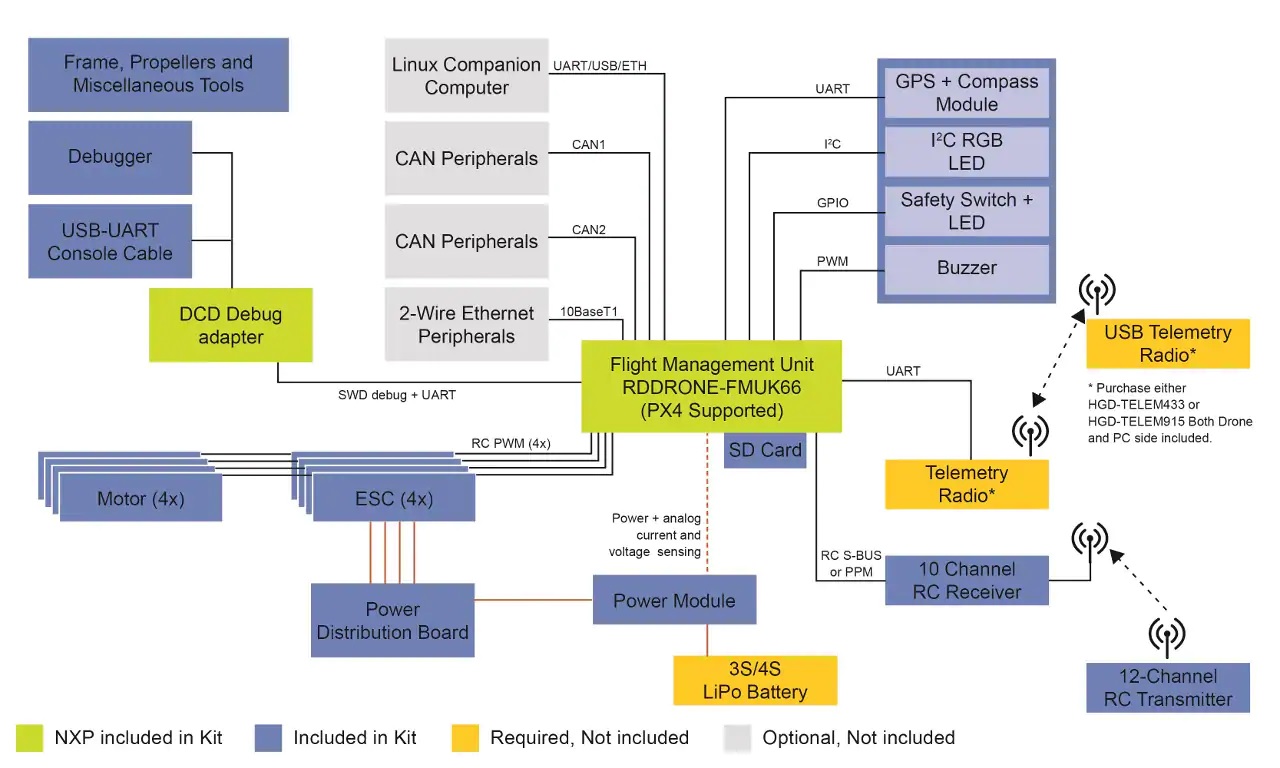
1) Building the drone.
Here's a picture of the kit of parts.
The kit came with everything you need to assemble the drone including a small set of screwdriver tools.
https://nxp.gitbook.io/hovergames/userguide/getting-started/drone-kit-contents
The starting page for all the HoverGames II information can be found at the following link:
https://nxp.gitbook.io/hovergames/
I did have to order a few LiPo batteries. A few hours later, and a new drone was born. There are some helpful assembly videos on the internet.
https://nxp.gitbook.io/hovergames/userguide/assembly
The RDDRONE-FMUK66 was programmed with the PX4 software using the given programming tools and watching the installation videos.
Once the motors were all tested for direction and phase, and the transmitter was programmed for the correct aircraft parameters, it was time to try and manually fly the drone.
2) Configure the NXP NAVQ companion computer
The instructions for using the NXP NAVQ computer can be found at the following link:
https://nxp.gitbook.io/8mmnavq/
There are two images to start with, HoverGames-BSP and HoverGames-Demo. Both are available through GitHub.
https://github.com/NXPmicro/meta-nxp-hovergames
I set up a computer with Debian Linux to try and use the simulator and other programs, ROS, GStreamer, OpenCV, etc.
NXP provided a gitbook for the NAVQ project.
https://nxp.gitbook.io/8mmnavq/archive/developer-quick-start-guide
3) Control the PX4 with the NAVQ
To control the PX4 using the NAVQ companion computer I tried to use the MavLink interface.
The MavLink interface is a part of the MAVSDK program library.
https://mavsdk.mavlink.io/develop/en/index.html
I spent hours and hours and hours trying to install and compile all the required libraries to use MavLink to control the PX4, however I was not successful at building a working image on the NAVQ. After a month of reading examples online and asking questions that didn't get answered except for RTFM messages, I gave up.
It has been impossible to fly outside December-February due to the winter weather, not optimum at all for drone flying. It will be nice again in April - maybe a good time to start again.
Maybe by the time HoverGames III is announced, I will have learned enough about ROS and MavLink to participate again.





{kind=link}
Comments
Please log in or sign up to comment.