

Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 30 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 3 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
1 / 2
This project is made of two parts the emitter and the receiver it can be used to send texts over laser using a keyPad and an LCD
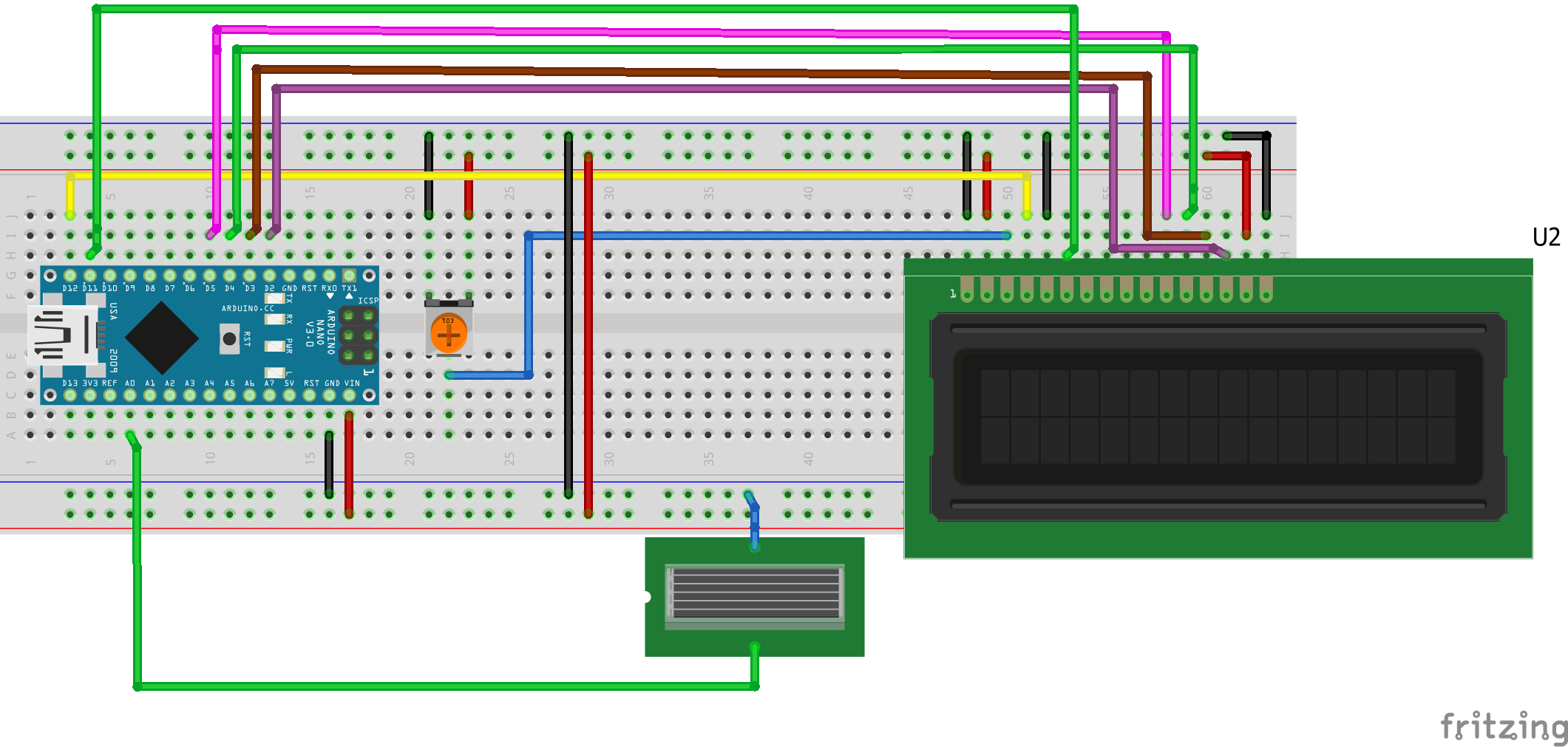
The receiver
the photo cell must be placed face to face with laser to receive data
LCD:
VSS ---> Ground
VDD ---> Arduino 5V
K ---> Ground
A ---> Arduino 5V
RW ---> Ground
V0/VEE ---> The Vout of the potentiometer
RS ---> Arduino digital pin 12
EN ---> Arduino digital pin 11
D4 ---> Arduino digital pin 5
D5 ---> Arduino digital pin 4
D6 ---> Arduino digital pin 3
D7 ---> Arduino digital pin 2
Solar Cell:
The Negative lead of the SC is connected to the ground
The Positive lead of the SC is connected to the Arduino Analog pin A0
LCD:
VSS ---> Ground
VDD ---> Arduino 5V
K ---> Ground
A ---> Arduino 5V
RW ---> Ground
V0/VEE ---> The Vout of the potentiometer
RS ---> Arduino digital pin 12
EN ---> Arduino digital pin 11
D4 ---> Arduino digital pin 5
D5 ---> Arduino digital pin 4
D6 ---> Arduino digital pin 3
D7 ---> Arduino digital pin 2
Solar Cell:
The Negative lead of the SC is connected to the ground
The Positive lead of the SC is connected to the Arduino Analog pin A0
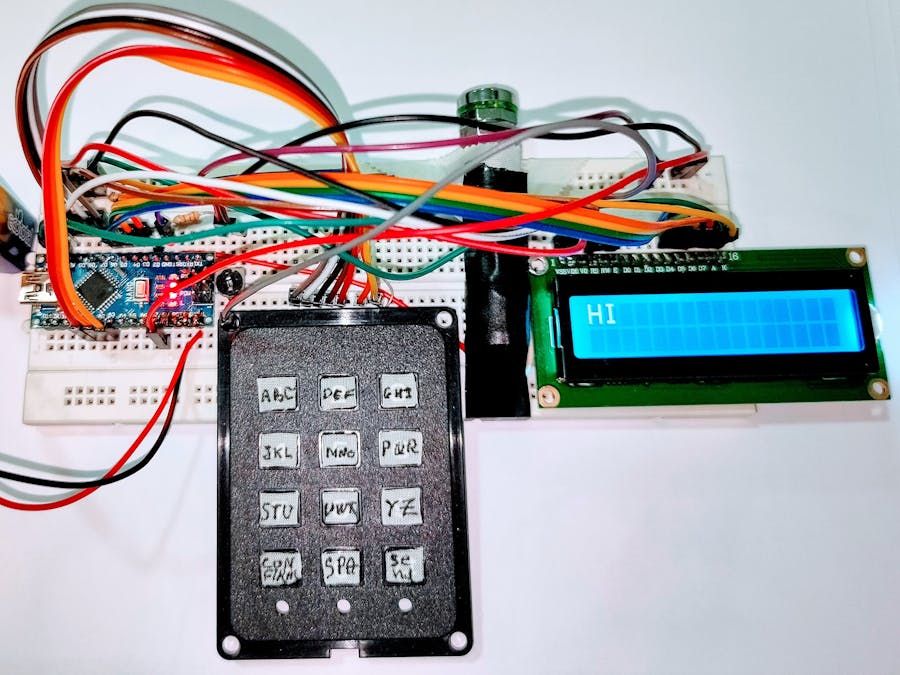
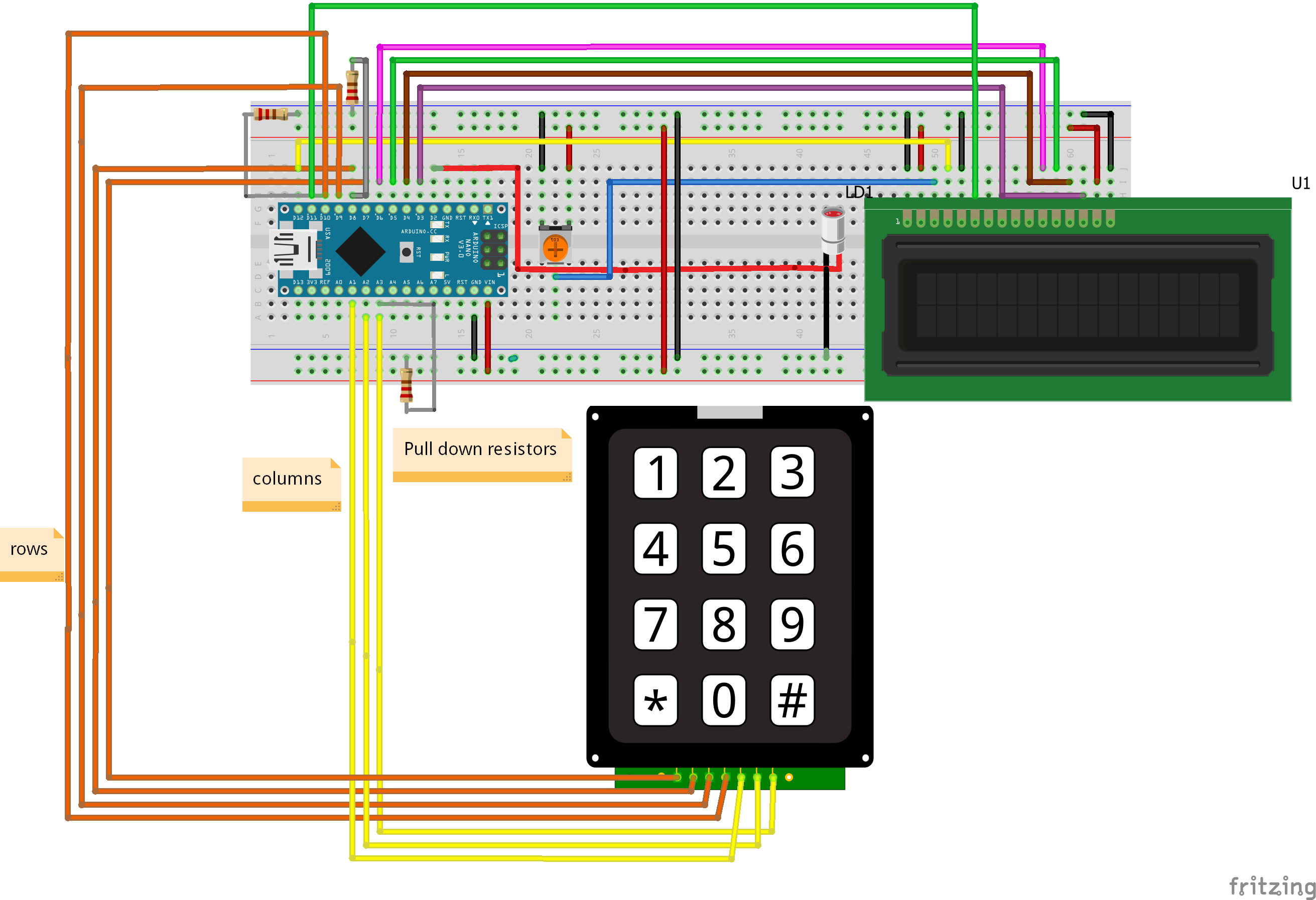
The emitter
the user must choose what he wants to send using the keypad and the LCD ,after typing each letter you should press the confirm button and eventually press the send button .
LCD:
VSS ---> Ground
VDD ---> Arduino 5V
K ---> Ground
A ---> Arduino 5V
RW ---> Ground
V0/VEE ---> The Vout of the potentiometer
RS ---> Arduino digital pin 12
EN ---> Arduino digital pin 11
D4 ---> Arduino digital pin 6
D5 ---> Arduino digital pin 5
D6 ---> Arduino digital pin 4
D7 ---> Arduino digital pin 3
KEYPAD:
A ---> Arduino Analog pin A2 //all analog pins are used as digital pins
B ---> Arduino Analog pin A1
C ---> Arduino digital pin 9
D ---> Arduino digital pin 7
1 ---> Arduino digital pin 8
2---> Arduino digital pin 10
3---> Arduino Analog pin A3
PULL-DOWN RESISTORS:
the first end of the resistor in connected to the Digital pin 8 and the 2nd to the ground
the first end of the resistor in connected to the Digital pin 10 and the 2nd to the ground
the first end of the resistor in connected to the Analog pin A3 and the 2nd to the ground
LASER DIODE:
The Cathode of the LD is connected to the ground
The Anode of the LD is connected to the Arduino digital pin 2
LCD:
VSS ---> Ground
VDD ---> Arduino 5V
K ---> Ground
A ---> Arduino 5V
RW ---> Ground
V0/VEE ---> The Vout of the potentiometer
RS ---> Arduino digital pin 12
EN ---> Arduino digital pin 11
D4 ---> Arduino digital pin 6
D5 ---> Arduino digital pin 5
D6 ---> Arduino digital pin 4
D7 ---> Arduino digital pin 3
KEYPAD:
A ---> Arduino Analog pin A2 //all analog pins are used as digital pins
B ---> Arduino Analog pin A1
C ---> Arduino digital pin 9
D ---> Arduino digital pin 7
1 ---> Arduino digital pin 8
2---> Arduino digital pin 10
3---> Arduino Analog pin A3
PULL-DOWN RESISTORS:
the first end of the resistor in connected to the Digital pin 8 and the 2nd to the ground
the first end of the resistor in connected to the Digital pin 10 and the 2nd to the ground
the first end of the resistor in connected to the Analog pin A3 and the 2nd to the ground
LASER DIODE:
The Cathode of the LD is connected to the ground
The Anode of the LD is connected to the Arduino digital pin 2




{kind=link}
{kind=link}
Comments