



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 4 | |||
| × | 4 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Hello There!
Humans just love to control stuff, don't they? Well I bet you do too! So being quite the Arduino enthusiast myself; Today I will guide you through a project that I have made which I am you will surely enjoy making too! Without further ado, let's dive in!
This will be a Bluetooth controlled car so for this project we will be using the HC-05 Bluetooth module to receive the controlling commands from any smartphone with the Google Play Store.
We will also need an Android app which will be sending the controlling commands to the Bluetooth module(HC-05). I will provide further details in a while.
Building The Chassis
Since the car is a 4WD vehicle we will be using four wheels which easily connect to four BO motors. The chassis that I have used is made of plywood and is of dimensions(12x14), but you can use whatever dimensions you please. I have painted it jet black in order to remove the dry color of the plywood but again this is your car and you can do anything you wish to it! you could paint designs or decals to it and it's all your creativity.
Here I have attached the motors to the chassis using double sided tape. But you could also glue-gun them in place for the sake of permanence, but double sided tape works just as well. Solder a wire to each terminal of every motor (8 in total) and make two holes on either side of the chassis to thread the wires out.
Materials Used
These are the pictures of the materials to be used for making the car:-
- Two 3.7V Li-ion batteries
- Battery holder with switch and power jack
- HC-05 Bluetooth Module
- Arduino Uno
- Arduino Uno Motor Shield (l298)
- 4 BO Motors
- 4 Wheels
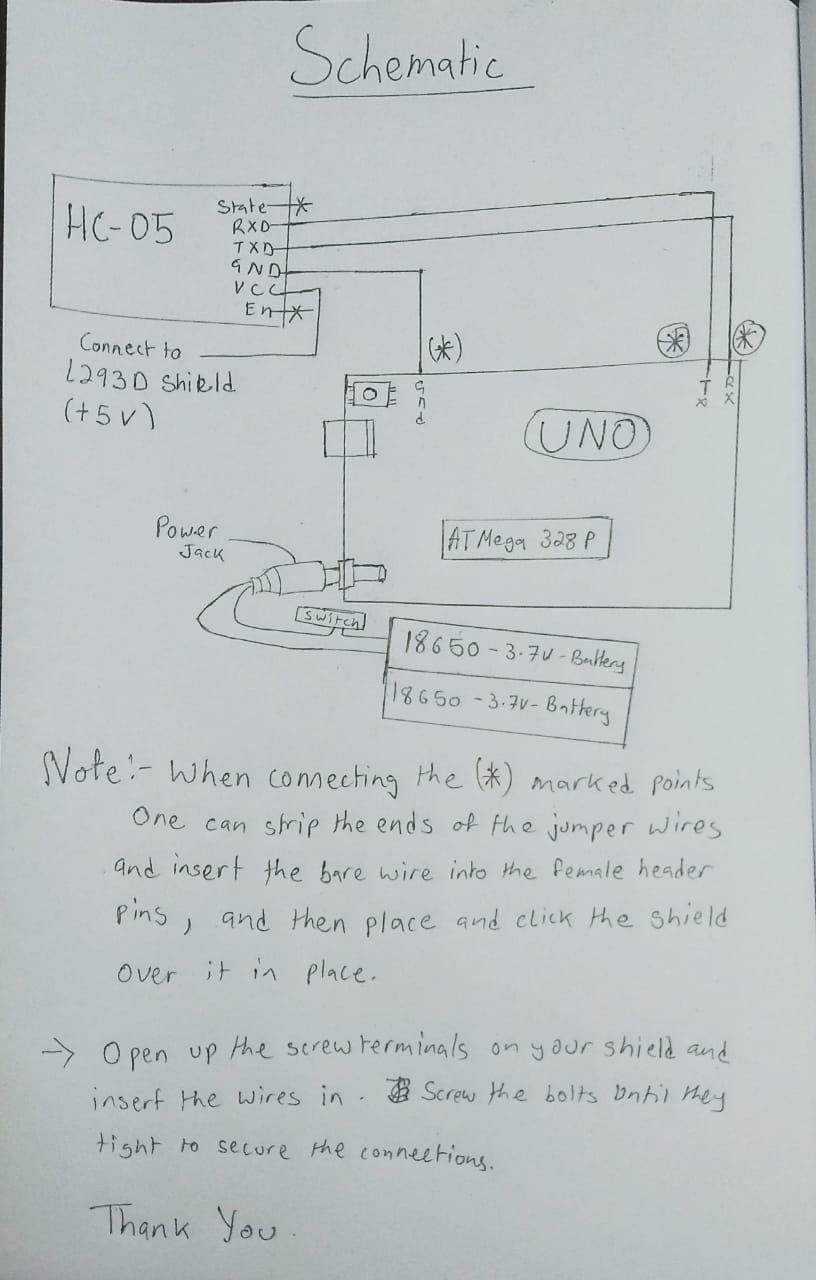
CONNECTIONS
Please follow my hand-drawn schematic which will guide you through each connection.
NOTE:- The battery holder I have used is self designed. It is a battery holder connected to a switch. these two terminals are the connected to a power jack.
NOTE:- Connect the motor wires to the screw terminals of the shield.
After connections the circuit should look like the photo given in the title.
Disclaimer- While uploading the code please disconnect RX and TX.
Have fun and good luck!!!!!!!!
{kind=link}

Comments
Please log in or sign up to comment.