i) UV-C Dose and time to kill dose:The Roboboi-UVC Germicidal robot uses two Philips TUV 64 T5, equipped with an electronic HF ballast, as its primary UV-C source. The T5 uses a double cap single pin electronic ballast, ensuring low supply voltage for operation and an instantaneous light-up time, while also eliminating any stroboscopic effect for a continuous UV irradiation.
The chosen lamp not only gives an excellent lifespan (estimated at 9000h) for reliable operations, the UV-C values irradiated, as shown, shows an excellent dose vs time values.
This not only provides with a high kill time (with threshold values reaching just in 60 seconds at 1m), allowing faster robotic operations, but given the current situation, shows promising results to kill SARS-CoV-2 with a 90% efficiency.
ii) Power Source:The unit is powered by a Panasonic 200Ah battery, giving good operation hours of 3hr plus operation time.
iii) Safety/UX featuresTo make most out of the product, the Roboboi UVC Germicidal robot boasts of a plethora of safety as well as other features to make its application as efficiently as possible:
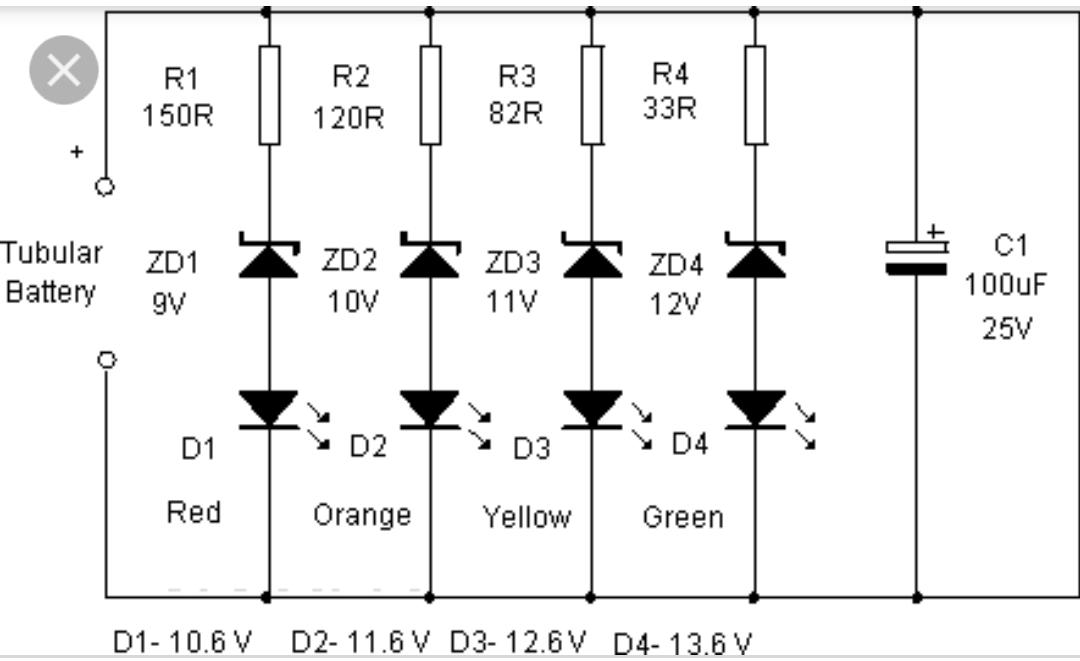
Battery Level Indicator: To prolong battery life as well as maximise efficiency, a low power, ‘always on’ battery level indicator is present on the body of the robot, and utilises zener diodes to achieve operation.
- Battery Level Indicator: To prolong battery life as well as maximise efficiency, a low power, ‘always on’ battery level indicator is present on the body of the robot, and utilises zener diodes to achieve operation.
If it has a breakdown voltage of 5.1V, after 5.1V Or greater is applied to it, it will conduct current across it which can then power on a load. When the voltage reaches above the threshold of 5.1V, the diode conducts current across and lights up the LED indicating the voltage level. Zener diode can be used to produce a stabilized voltage output with low ripple under varying load current condition. By passing a small current through the diode from the source, the Zener diode will conduct sufficient current to maintain a voltage drop of output voltage. This can maintain a constant DC output voltage across the load in spite of variations in the input voltage or changes in the load current.
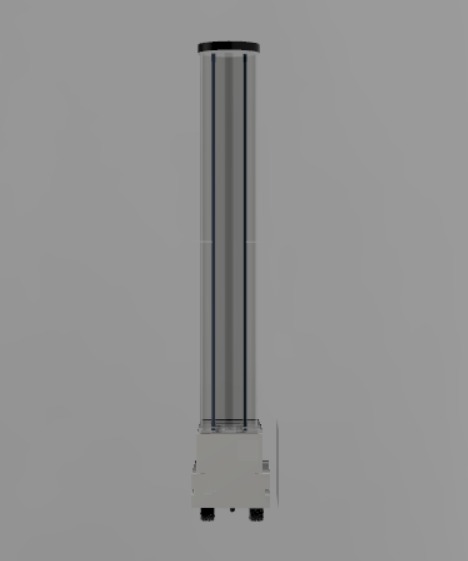
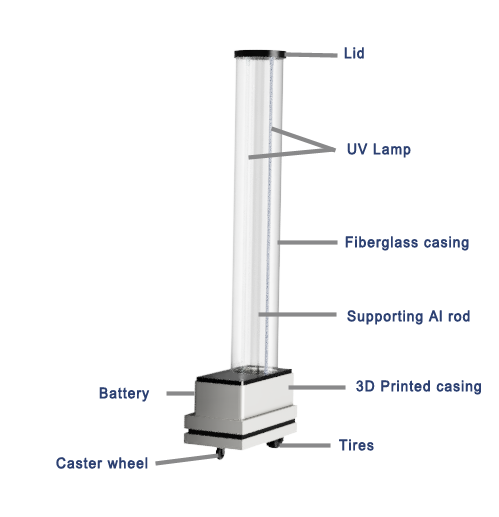
Enclosed lamp chamber : To avoid shattered glass to enter the body and disrupt other peripherals in case of an accident, the lamp chamber is constructed out of shatterproof fibre glass, and has no access to the chamber below. The lamp chamber can be accessed from the top removable lid. This not only allows easy removal of lamp shards in a mishap, direct access to only the lamps gives the user freedom to change the lamps, should they need to, on their own.
- Enclosed lamp chamber : To avoid shattered glass to enter the body and disrupt other peripherals in case of an accident, the lamp chamber is constructed out of shatterproof fibre glass, and has no access to the chamber below. The lamp chamber can be accessed from the top removable lid. This not only allows easy removal of lamp shards in a mishap, direct access to only the lamps gives the user freedom to change the lamps, should they need to, on their own.
Additionally, a rubber gasket can also be installed on the removable lid, on request. This provides further protection from mild splashes and spills to enter the chamber.
App UI
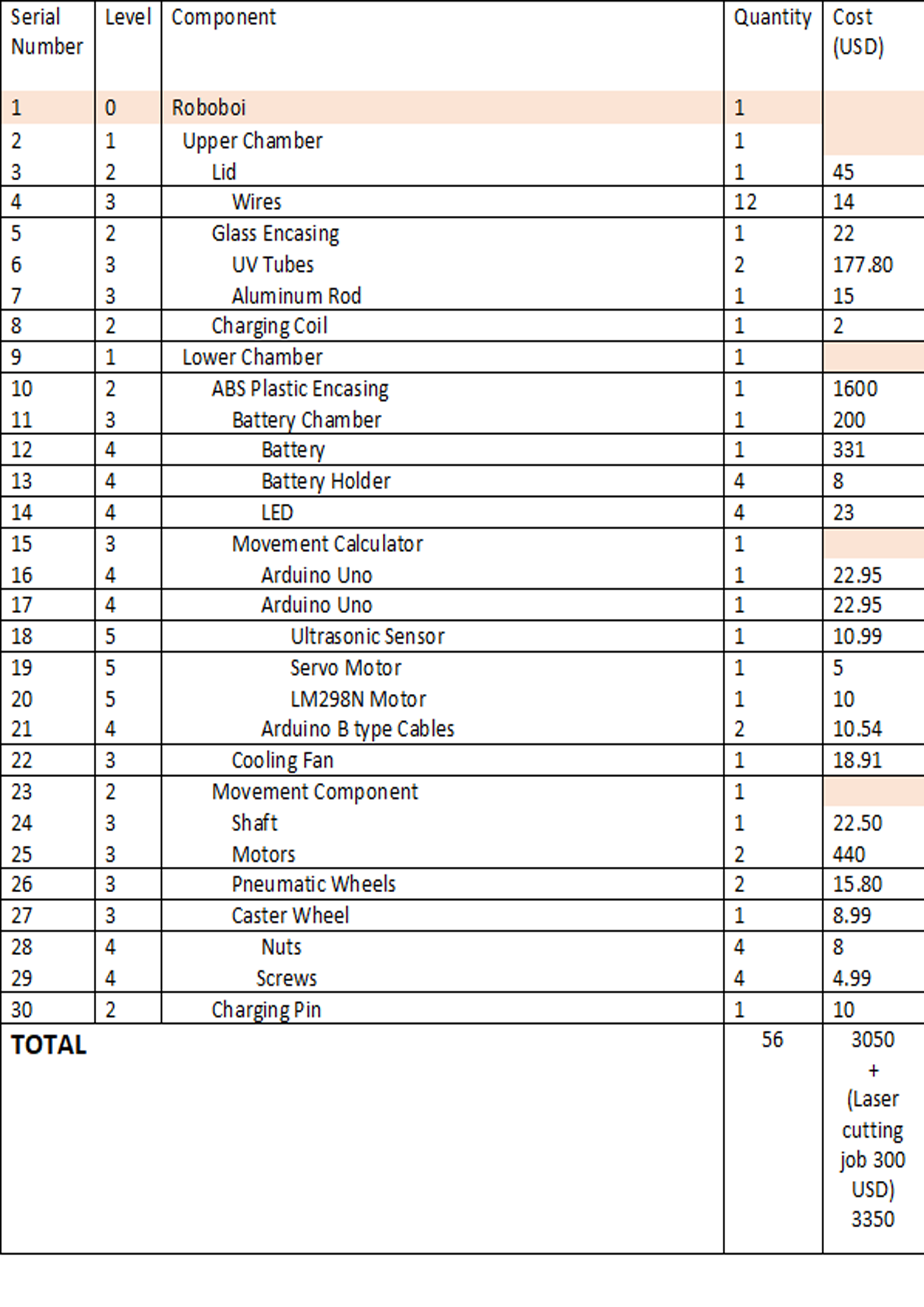
Sparse use of custom materials and peripherals
- Sparse use of custom materials and peripherals
iv) Autonomous area mappingWen used an innovative Arduino setup for mapping.
A comparison among the proposed product and leading existing uv robots can be seen on the QFD chart below:
Summary:The following list stacks up our proposed product with the required parameters:







_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)























_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.