


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
Many of you face a problem when it comes to Flight Controller which is the brain of the Multirotor. There are plenty of ready-made pre-flashed Flight controllers in the market for cheap, But have you thought of building your own Flight controller with your Arduino? So this is the right place to understand and build your own Flight controller for your Quadcopter or Multirotor with your Arduino.
Now the questions come, Where and how do I get the code for the quadcopter? So the answer is MultiWii.
MultiWii is a very popular flight controller software for DIY multi-rotors with a large community. It has support for various multi-copters with advanced features such as Bluetooth control via your smartphone, OLED display, barometer, magnetometer, GPS position hold and return to home, LED strips, and many more. So let’s build our flight controller using Arduino!
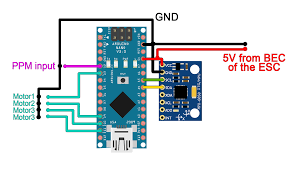
Step 1: Flight Controller DesignHere are the schematics for the flight controller board. You can make one on your general-purpose PCB or can order a PCB from a manufacturer as I did.
ESC Connections
- D3 << ESC 1 Signal Pin
- D9 << ESC 3 Signal Pin
- D10 << ESC 2 Signal Pin
- D11 << ESC 4 Signal Pin
Bluetooth Module Connections
- TX << RX
- RX << TX
MPU-6050 Connections
- A4 << SDA
- A5 << SCL
LED Indicator
- D8 << Anode Leg of LED
Receiver Connections
- D2 << Throttle
- D4 << Elerons
- D5 << Ailerons
- D6 << Rudder
- D7 << AUX 1
First, download the MultiWii code from the link below.
For configuration, please visit: http://www.robocircuits.com/arduino-quadcopter/






{kind=link}
Comments
Please log in or sign up to comment.