STEP BY STEP:
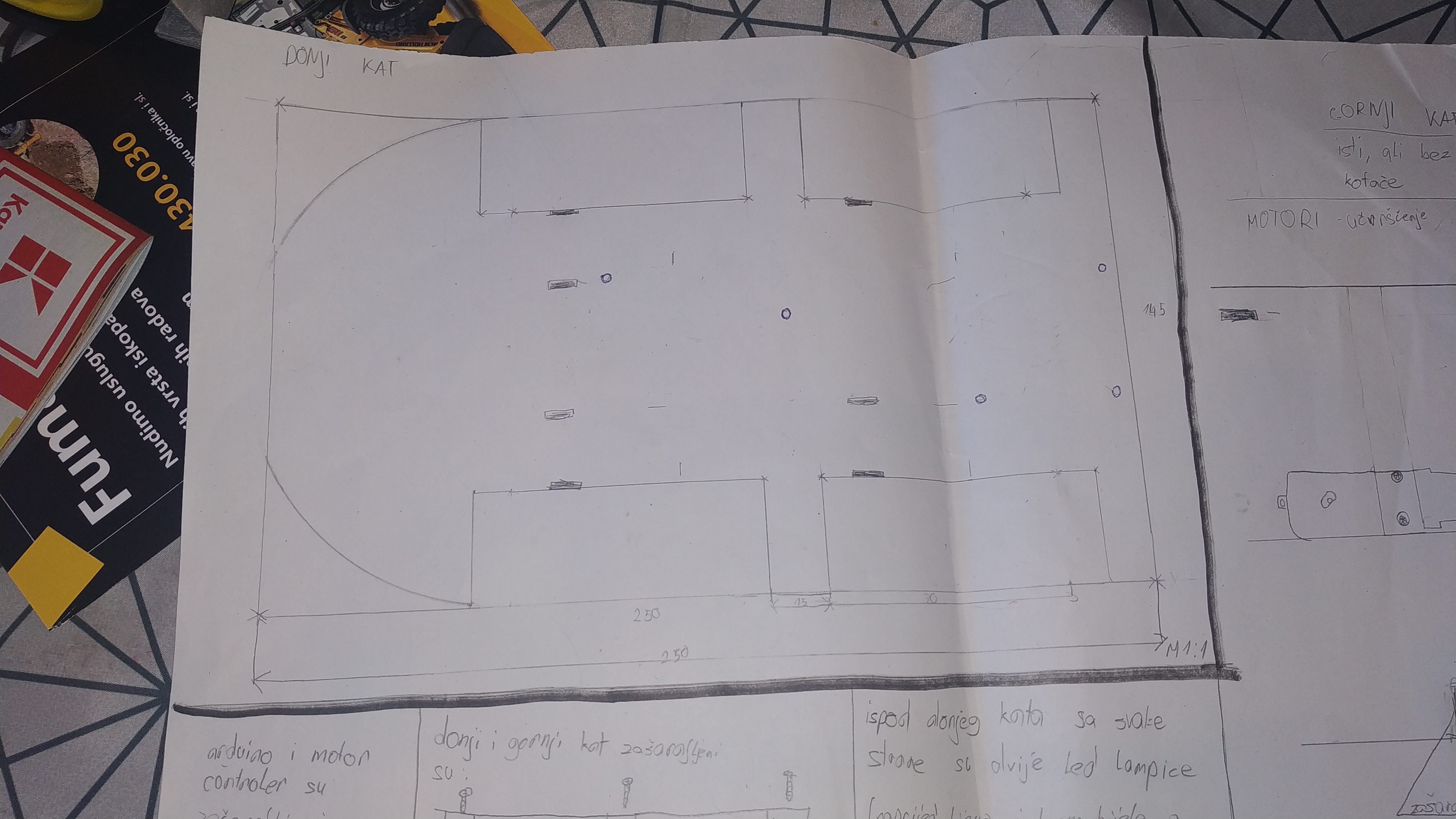
1. First cut the 2 pieces of wood for chassis. Top and bottom floor.
2. Drill the holes where you want to put arduino, L298n.
3. Stick two block sof wood on bottom chassis for motors
4. Drill holes in wooden sticks, and stick leds in the holes, than use soldering iron to put resistors and jumpers to leds. Do that for front and back.
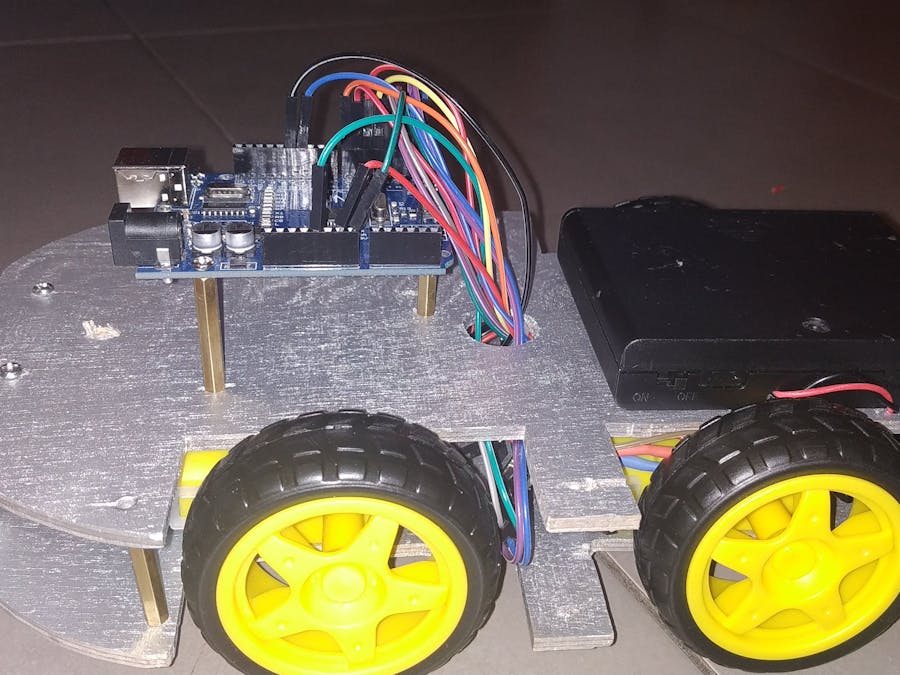
5. Montage arduino uno with distancers and the rest of the parts without distancers.
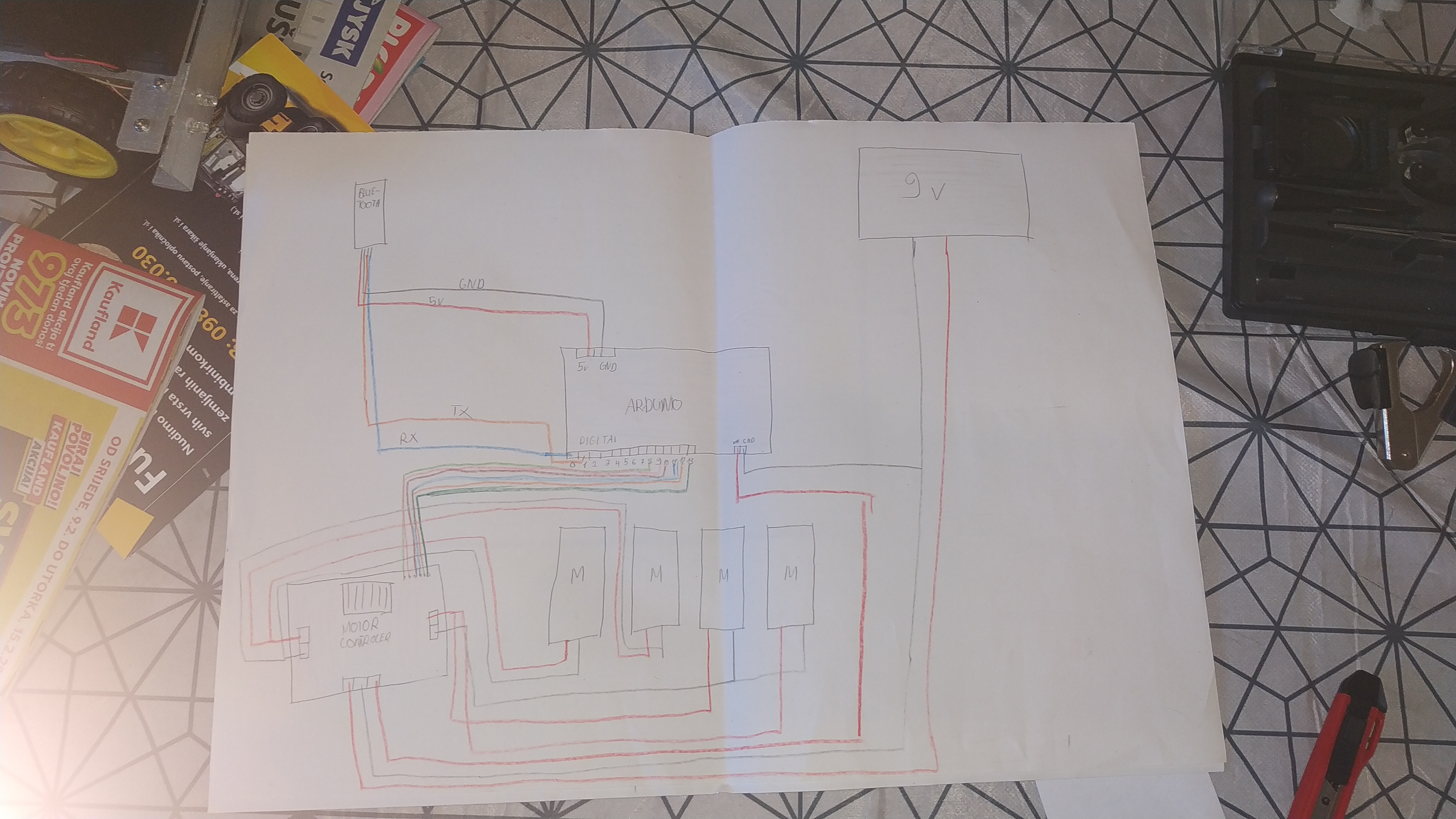
6. Unplug the bluetooth from the 0(RX), 1(TX) Digital pins, than upload the code.
7. Put the batteries in the holder, and the wheels on the motors, and that's it.


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)


















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.