// Saikat Chakraborty
// Roll : 1803005
// Dept. of EEE, KUET
#include <Servo.h>
const int numReadings = 10;
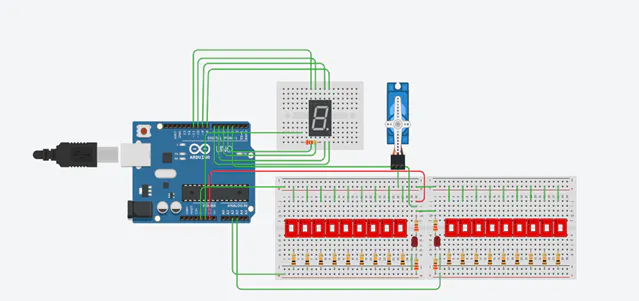
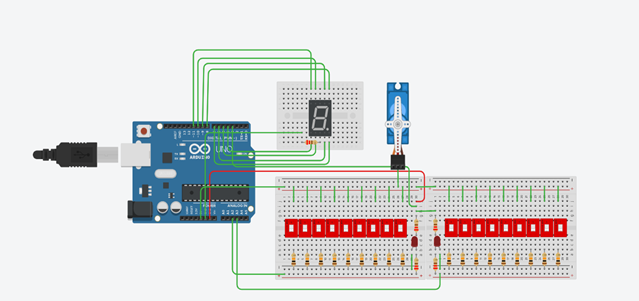
byte pin[] = {4, 5, 6, 7, 8, 9, 10, 11};//arduino pin array
Servo myservo;
int number[10][8] = {//number array
{1, 1, 1, 0, 1, 1, 1, 0},//0
{0, 0, 1, 0, 1, 0, 0, 0},//1
{1, 1, 0, 0, 1, 1, 0, 1},//2
{0, 1, 1, 0, 1, 1, 0, 1},//3
{0, 0, 1, 0, 1, 0, 1, 1},//4
{0, 1, 1, 0, 0, 1, 1, 1},//5
{1, 1, 1, 0, 0, 1, 1, 1},//6
{0, 0, 1, 0, 1, 1, 1, 0},//7
{1, 1, 1, 0, 1, 1, 1, 1},//8
{0, 1, 1, 0, 1, 1, 1, 1},//9
};
//11-12, 24-25, 35-36, 47-48, 55-56, 65-66, 74-75, 81-82, 89-90
//5-6, 12-13, 19-20,25-26, 32-33, 38-39, 44-45, 50-51, 55-56
//14, 27, 38, 49, 58, 67, 76, 84, 91, 98
int levels[11] = {12, 27, 37, 50, 61, 75, 85, 98, 109, 130};
int index = -1;
void setup() {
for (byte a = 0; a < 8; a++) {
pinMode(pin[a], OUTPUT);//define output pins
}
myservo.attach(3, 600, 2300);
myservo.write(90);
Serial.begin(9600);
}
void loop() {
int A0 = analogRead(A4); // Read analog outputs
int A1 = analogRead(A5);
int value = (A0 >= A1)?A0:A1; // Compare to get the largest value
int dir = (A0 >= A1)?1:-1; // Calculate the direction of servo
Serial.println(value);
int temp = 0;
for (int i = 0; i < 10; i++)
{
if (value >= levels[i] && value < levels[i + 1])
{
temp = i + 1;
break;
}
}
if (temp != index)
{
index = temp;
for (int b = 0; b < 8; b++) {
digitalWrite(pin[b], number[temp][b]);//display numbers
}
myservo.write(90 + temp * dir * 10);
}
delay(100); // delay in between reads for stability
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)












{kind=link}
Comments