1. INTRODUCTIONThe field of security systems is a rapidly developing.New and improved types of security systems are always coming into the market and the choice between the different types seems quite difficult.Despite the bemusing selection, we should understand that all the security systems have similar basic structure and work in accordance to the same principals.In the field of security systems sensors play a very important role.The different type of sensors which are most commonly used are ultrasonic sensor, microwave sensor, photoelectric sensor, Passive Infrared (PIR) Sensor, noise detector etc.Nowadays Wireless security system are becoming popular because of its nature of being very user-friendly, simple and fast.The main disadvantage of using wired systems is that it uses the telephone line for its working.However, If the Wireless security system have proper battery backup, with internet they will work even during power outages.
The idea of making an Ultrasonic intruder alert system is used in defense, be it Army, Navy, Air Force and automatic/driverless parking systems, accident prevention during driving etc.The project made by us can be used in any systems you may want to use like in automobiles, homes, remote areas, restricted areas, etc.
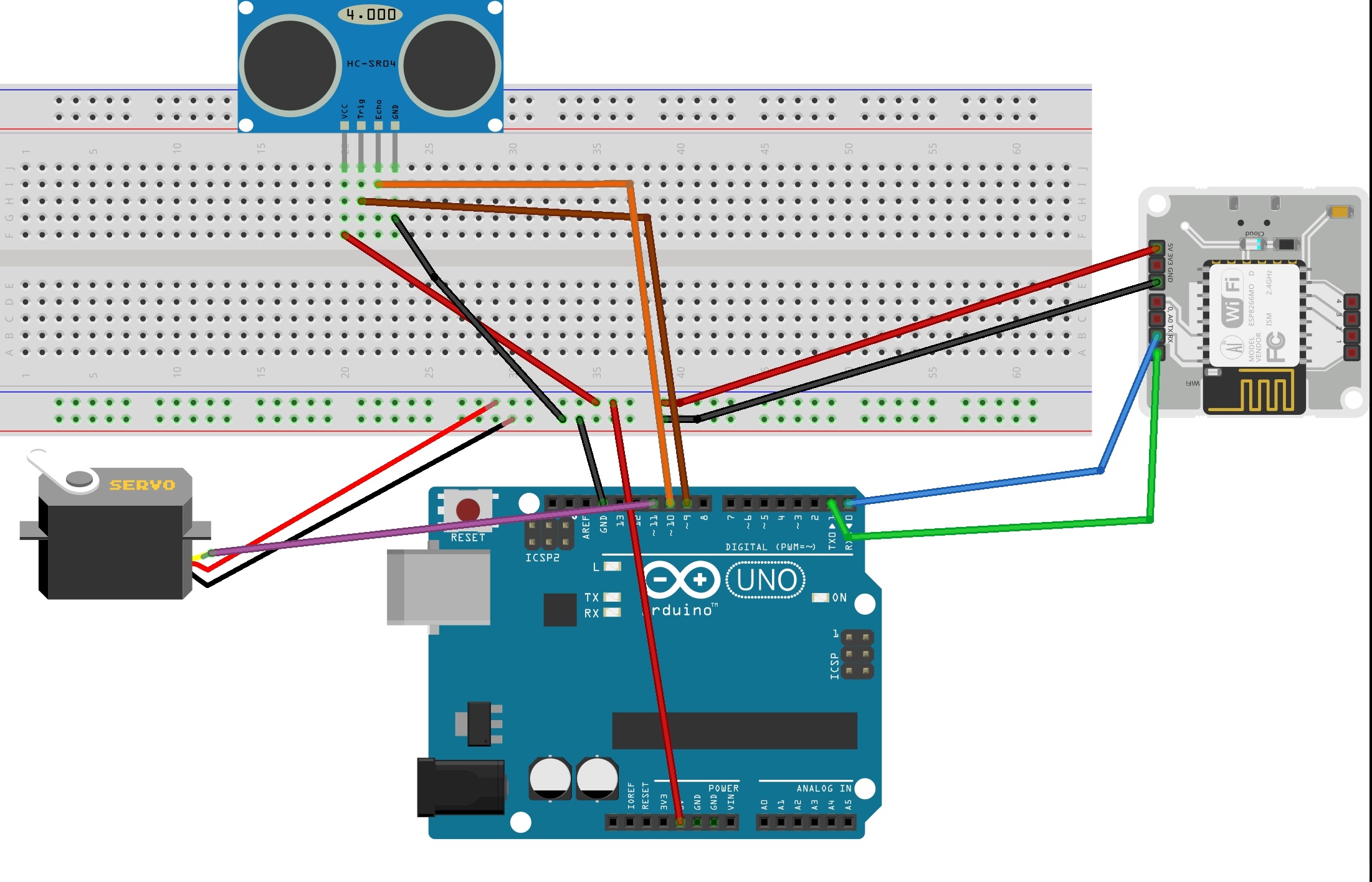
2. DEMONSTRATIONHARDWARE SETUPIntruder Alert system Circuit
I have used two libraries from arduino IDE which are in-built
#include <Servo.h>
#include <SoftwareSerial.h>
#include <Servo.h> is the library used for the working of the servo motor
#include <SoftwareSerial.h> is used to connect the Bolt Iot device to the arduino Uno.
I have given the code for both arduino uno and Python in the code section.
Along with Arduino Uno you have to also create a bot and a Channel in Telegram, which can be learnt in the BOLT Online Course.
Final result you get when there is any disturbance


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










{kind=link}
Comments
Please log in or sign up to comment.