


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 4 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
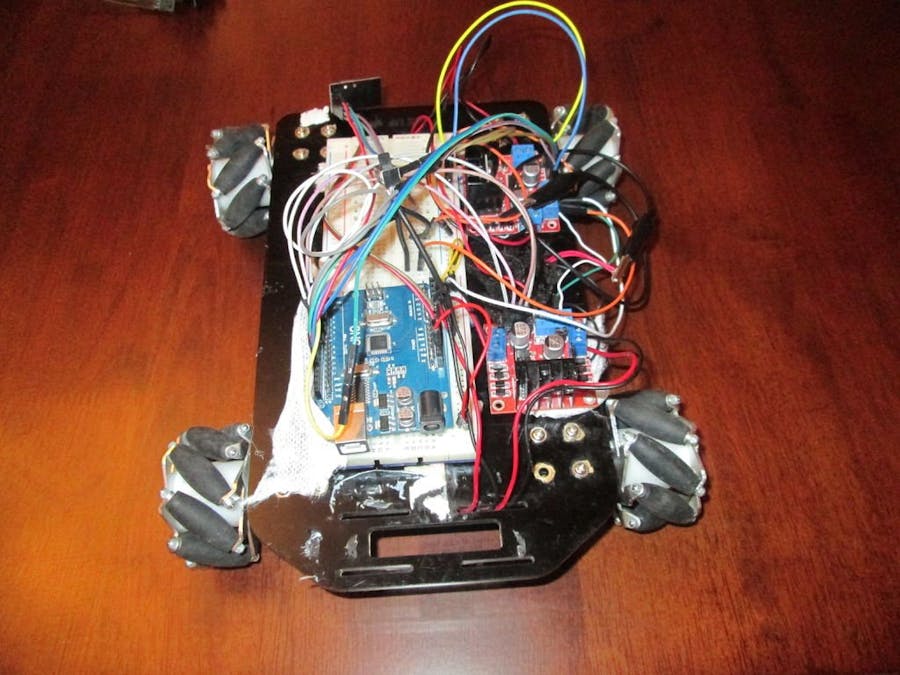
RC Rover is a robotics project that aims to improve rover control through the use of radio frequency and the interaction of rover movement with hand movement using the inertial unit (MPU6050), but also intends to control of this rover by using a joystick. All this is done remotely using the radio frequency Nrf24l01 (2.4Ghz).
This project is realized using open source development boards (Arduino): one for data transmitter (main command) which contains the joystick and the inertial unit, and one for the receiver (control of the engines). For the transmission I used Arduino Pro Mini Board and for the receiver I used Arduino Uno board.
I used the joystick and inertial unit (MPU6050) for the command, and the commande is with the RF (radio frequency) using the module Nrf24l01.
You can choose between two modes of control:
- Control the rover with the joystick
- Control the rover with the movement of your hand (gestures motions)
_i3tnFRx9D1.png)
#include <SPI.h>
#include <nRF24L01.h>
#include <RF24.h>
#include <Servo.h>
#include <Motor.h>
Motor Omega(2,3,1); // Gauche 1
Motor Delta(4,5,1); // Droite 1
Motor Teta(6,9,1); // gauche 2
Motor Zeta(10,5,1); // droite 2
int data[2];
char x[2];
//int Pos[2];
RF24 radio (7,8);
const byte address[6]="00001";
//const byte addr[6]="00002";
//int Led=10;
void setup() {
Omega.begin();
Delta.begin() ;
Teta.begin();
Zeta.begin();
//Alpha.attach(3);
//Beta.attach(5);
// pinMode(Led,OUTPUT);
Serial.begin(9600);
radio.begin();
radio.openReadingPipe(0,address);
radio.setPALevel(RF24_PA_MAX);
}
void loop() {
delay(5);
radio.startListening();
if(radio.available()) {
while (radio.available())
{
radio.read(x,sizeof(x));
Serial.print(x[0]); Serial.print("\t"); Serial.println(x[1]);
if (x[0]=='G' ) {
Omega.rearward(100);
Teta.rearward(100);
Delta.forward(100);
Zeta.forward(100);
}
else if (x[0] =='D' ) {
Delta.rearward(100);
Zeta.rearward(100);
Omega.forward(100);
Teta.forward(100);
}
else if (x[0]== 'S' && x[1]=='S'){
Delta.turnOff();
Zeta.turnOff();
Omega.turnOff();
Teta.turnOff();
}
if (x[1]=='F') {
Omega.forward(100);
Teta.forward(100);
Delta.forward(100);
Zeta.forward(100);
}
else if (x[1]=='R') {
Omega.rearward(100);
Teta.rearward(100);
Delta.rearward(100);
Zeta.rearward(100);
}
else if (x[1]=='S' && x[0]=='S') {
Delta.turnOff();
Zeta.turnOff();
Omega.turnOff();
Teta.turnOff();
}
}
}
}
// I2Cdev library collection - MPU6050 I2C device class
// Based on InvenSense MPU-6050 register map document rev. 2.0, 5/19/2011 (RM-MPU-6000A-00)
// 8/24/2011 by Jeff Rowberg <jeff@rowberg.net>
// Updates should (hopefully) always be available at https://github.com/jrowberg/i2cdevlib
//
// Changelog:
// ... - ongoing debug release
// NOTE: THIS IS ONLY A PARIAL RELEASE. THIS DEVICE CLASS IS CURRENTLY UNDERGOING ACTIVE
// DEVELOPMENT AND IS STILL MISSING SOME IMPORTANT FEATURES. PLEASE KEEP THIS IN MIND IF
// YOU DECIDE TO USE THIS PARTICULAR CODE FOR ANYTHING.
/* ============================================
I2Cdev device library code is placed under the MIT license
Copyright (c) 2012 Jeff Rowberg
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
THE SOFTWARE.
===============================================
*/
#include "MPU6050.h"
/** Default constructor, uses default I2C address.
* @see MPU6050_DEFAULT_ADDRESS
*/
MPU6050::MPU6050() {
devAddr = MPU6050_DEFAULT_ADDRESS;
}
/** Specific address constructor.
* @param address I2C address
* @see MPU6050_DEFAULT_ADDRESS
* @see MPU6050_ADDRESS_AD0_LOW
* @see MPU6050_ADDRESS_AD0_HIGH
*/
MPU6050::MPU6050(uint8_t address) {
devAddr = address;
}
/** Power on and prepare for general usage.
* This will activate the device and take it out of sleep mode (which must be done
* after start-up). This function also sets both the accelerometer and the gyroscope
* to their most sensitive settings, namely +/- 2g and +/- 250 degrees/sec, and sets
* the clock source to use the X Gyro for reference, which is slightly better than
* the default internal clock source.
*/
void MPU6050::initialize() {
setClockSource(MPU6050_CLOCK_PLL_XGYRO);
setFullScaleGyroRange(MPU6050_GYRO_FS_250);
setFullScaleAccelRange(MPU6050_ACCEL_FS_2);
setSleepEnabled(false); // thanks to Jack Elston for pointing this one out!
}
/** Verify the I2C connection.
* Make sure the device is connected and responds as expected.
* @return True if connection is valid, false otherwise
*/
bool MPU6050::testConnection() {
return getDeviceID() == 0x34;
}
// AUX_VDDIO register (InvenSense demo code calls this RA_*G_OFFS_TC)
/** Get the auxiliary I2C supply voltage level.
* When set to 1, the auxiliary I2C bus high logic level is VDD. When cleared to
* 0, the auxiliary I2C bus high logic level is VLOGIC. This does not apply to
* the MPU-6000, which does not have a VLOGIC pin.
* @return I2C supply voltage level (0=VLOGIC, 1=VDD)
*/
uint8_t MPU6050::getAuxVDDIOLevel() {
I2Cdev::readBit(devAddr, MPU6050_RA_YG_OFFS_TC, MPU6050_TC_PWR_MODE_BIT, buffer);
return buffer[0];
}
/** Set the auxiliary I2C supply voltage level.
* When set to 1, the auxiliary I2C bus high logic level is VDD. When cleared to
* 0, the auxiliary I2C bus high logic level is VLOGIC. This does not apply to
* the MPU-6000, which does not have a VLOGIC pin.
* @param level I2C supply voltage level (0=VLOGIC, 1=VDD)
*/
void MPU6050::setAuxVDDIOLevel(uint8_t level) {
I2Cdev::writeBit(devAddr, MPU6050_RA_YG_OFFS_TC, MPU6050_TC_PWR_MODE_BIT, level);
}
// SMPLRT_DIV register
/** Get gyroscope output rate divider.
* The sensor register output, FIFO output, DMP sampling, Motion detection, Zero
* Motion detection, and Free Fall detection are all based on the Sample Rate.
* The Sample Rate is generated by dividing the gyroscope output rate by
* SMPLRT_DIV:
*
* Sample Rate = Gyroscope Output Rate / (1 + SMPLRT_DIV)
*
* where Gyroscope Output Rate = 8kHz when the DLPF is disabled (DLPF_CFG = 0 or
* 7), and 1kHz when the DLPF is enabled (see Register 26).
*
* Note: The accelerometer output rate is 1kHz. This means that for a Sample
* Rate greater than 1kHz, the same accelerometer sample may be output to the
* FIFO, DMP, and sensor registers more than once.
*
* For a diagram of the gyroscope and accelerometer signal paths, see Section 8
* of the MPU-6000/MPU-6050 Product Specification document.
*
* @return Current sample rate
* @see MPU6050_RA_SMPLRT_DIV
*/
uint8_t MPU6050::getRate() {
I2Cdev::readByte(devAddr, MPU6050_RA_SMPLRT_DIV, buffer);
return buffer[0];
}
/** Set gyroscope sample rate divider.
* @param rate New sample rate divider
* @see getRate()
* @see MPU6050_RA_SMPLRT_DIV
*/
void MPU6050::setRate(uint8_t rate) {
I2Cdev::writeByte(devAddr, MPU6050_RA_SMPLRT_DIV, rate);
}
// CONFIG register
/** Get external FSYNC configuration.
* Configures the external Frame Synchronization (FSYNC) pin sampling. An
* external signal connected to the FSYNC pin can be sampled by configuring
* EXT_SYNC_SET. Signal changes to the FSYNC pin are latched so that short
* strobes may be captured. The latched FSYNC signal will be sampled at the
* Sampling Rate, as defined in register 25. After sampling, the latch will
* reset to the current FSYNC signal state.
*
* The sampled value will be reported in place of the least significant bit in
* a sensor data register determined by the value of EXT_SYNC_SET according to
* the following table.
*
* <pre>
* EXT_SYNC_SET | FSYNC Bit Location
* -------------+-------------------
* 0 | Input disabled
* 1 | TEMP_OUT_L[0]
* 2 | GYRO_XOUT_L[0]
* 3 | GYRO_YOUT_L[0]
* 4 | GYRO_ZOUT_L[0]
* 5 | ACCEL_XOUT_L[0]
* 6 | ACCEL_YOUT_L[0]
* 7 | ACCEL_ZOUT_L[0]
* </pre>
*
* @return FSYNC configuration value
*/
uint8_t MPU6050::getExternalFrameSync() {
I2Cdev::readBits(devAddr, MPU6050_RA_CONFIG, MPU6050_CFG_EXT_SYNC_SET_BIT, MPU6050_CFG_EXT_SYNC_SET_LENGTH, buffer);
return buffer[0];
}
/** Set external FSYNC configuration.
* @see getExternalFrameSync()
* @see MPU6050_RA_CONFIG
* @param sync New FSYNC configuration value
*/
void MPU6050::setExternalFrameSync(uint8_t sync) {
I2Cdev::writeBits(devAddr, MPU6050_RA_CONFIG, MPU6050_CFG_EXT_SYNC_SET_BIT, MPU6050_CFG_EXT_SYNC_SET_LENGTH, sync);
}
/** Get digital low-pass filter configuration.
* The DLPF_CFG parameter sets the digital low pass filter configuration. It
* also determines the internal sampling rate used by the device as shown in
* the table below.
*
* Note: The accelerometer output rate is 1kHz. This means that for a Sample
* Rate greater than 1kHz, the same accelerometer sample may be output to the
* FIFO, DMP, and sensor registers more than once.
*
* <pre>
* | ACCELEROMETER | GYROSCOPE
* DLPF_CFG | Bandwidth | Delay | Bandwidth | Delay | Sample Rate
* ---------+-----------+--------+-----------+--------+-------------
* 0 | 260Hz | 0ms | 256Hz | 0.98ms | 8kHz
* 1 | 184Hz | 2.0ms | 188Hz | 1.9ms | 1kHz
* 2 | 94Hz | 3.0ms | 98Hz | 2.8ms | 1kHz
* 3 | 44Hz | 4.9ms | 42Hz | 4.8ms | 1kHz
* 4 | 21Hz | 8.5ms | 20Hz | 8.3ms | 1kHz
* 5 | 10Hz | 13.8ms | 10Hz | 13.4ms | 1kHz
* 6 | 5Hz | 19.0ms | 5Hz | 18.6ms | 1kHz
* 7 | -- Reserved -- | -- Reserved -- | Reserved
* </pre>
*
* @return DLFP configuration
* @see MPU6050_RA_CONFIG
* @see MPU6050_CFG_DLPF_CFG_BIT
* @see MPU6050_CFG_DLPF_CFG_LENGTH
*/
uint8_t MPU6050::getDLPFMode() {
I2Cdev::readBits(devAddr, MPU6050_RA_CONFIG, MPU6050_CFG_DLPF_CFG_BIT, MPU6050_CFG_DLPF_CFG_LENGTH, buffer);
return buffer[0];
}
/** Set digital low-pass filter configuration.
* @param mode New DLFP configuration setting
* @see getDLPFBandwidth()
* @see MPU6050_DLPF_BW_256
* @see MPU6050_RA_CONFIG
* @see MPU6050_CFG_DLPF_CFG_BIT
* @see MPU6050_CFG_DLPF_CFG_LENGTH
*/
void MPU6050::setDLPFMode(uint8_t mode) {
I2Cdev::writeBits(devAddr, MPU6050_RA_CONFIG, MPU6050_CFG_DLPF_CFG_BIT, MPU6050_CFG_DLPF_CFG_LENGTH, mode);
}
// GYRO_CONFIG register
/** Get full-scale gyroscope range.
* The FS_SEL parameter allows setting the full-scale range of the gyro sensors,
* as described in the table below.
*
* <pre>
* 0 = +/- 250 degrees/sec
* 1 = +/- 500 degrees/sec
* 2 = +/- 1000 degrees/sec
* 3 = +/- 2000 degrees/sec
* </pre>
*
* @return Current full-scale gyroscope range setting
* @see MPU6050_GYRO_FS_250
* @see MPU6050_RA_GYRO_CONFIG
* @see MPU6050_GCONFIG_FS_SEL_BIT
* @see MPU6050_GCONFIG_FS_SEL_LENGTH
*/
uint8_t MPU6050::getFullScaleGyroRange() {
I2Cdev::readBits(devAddr, MPU6050_RA_GYRO_CONFIG, MPU6050_GCONFIG_FS_SEL_BIT, MPU6050_GCONFIG_FS_SEL_LENGTH, buffer);
return buffer[0];
}
/** Set full-scale gyroscope range.
* @param range New full-scale gyroscope range value
* @see getFullScaleRange()
* @see MPU6050_GYRO_FS_250
* @see MPU6050_RA_GYRO_CONFIG
* @see MPU6050_GCONFIG_FS_SEL_BIT
* @see MPU6050_GCONFIG_FS_SEL_LENGTH
*/
void MPU6050::setFullScaleGyroRange(uint8_t range) {
I2Cdev::writeBits(devAddr, MPU6050_RA_GYRO_CONFIG, MPU6050_GCONFIG_FS_SEL_BIT, MPU6050_GCONFIG_FS_SEL_LENGTH, range);
}
// ACCEL_CONFIG register
/** Get self-test enabled setting for accelerometer X axis.
* @return Self-test enabled value
* @see MPU6050_RA_ACCEL_CONFIG
*/
bool MPU6050::getAccelXSelfTest() {
I2Cdev::readBit(devAddr, MPU6050_RA_ACCEL_CONFIG, MPU6050_ACONFIG_XA_ST_BIT, buffer);
return buffer[0];
}
/** Get self-test enabled setting for accelerometer X axis.
* @param enabled Self-test enabled value
* @see MPU6050_RA_ACCEL_CONFIG
*/
void MPU6050::setAccelXSelfTest(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_ACCEL_CONFIG, MPU6050_ACONFIG_XA_ST_BIT, enabled);
}
/** Get self-test enabled value for accelerometer Y axis.
* @return Self-test enabled value
* @see MPU6050_RA_ACCEL_CONFIG
*/
bool MPU6050::getAccelYSelfTest() {
I2Cdev::readBit(devAddr, MPU6050_RA_ACCEL_CONFIG, MPU6050_ACONFIG_YA_ST_BIT, buffer);
return buffer[0];
}
/** Get self-test enabled value for accelerometer Y axis.
* @param enabled Self-test enabled value
* @see MPU6050_RA_ACCEL_CONFIG
*/
void MPU6050::setAccelYSelfTest(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_ACCEL_CONFIG, MPU6050_ACONFIG_YA_ST_BIT, enabled);
}
/** Get self-test enabled value for accelerometer Z axis.
* @return Self-test enabled value
* @see MPU6050_RA_ACCEL_CONFIG
*/
bool MPU6050::getAccelZSelfTest() {
I2Cdev::readBit(devAddr, MPU6050_RA_ACCEL_CONFIG, MPU6050_ACONFIG_ZA_ST_BIT, buffer);
return buffer[0];
}
/** Set self-test enabled value for accelerometer Z axis.
* @param enabled Self-test enabled value
* @see MPU6050_RA_ACCEL_CONFIG
*/
void MPU6050::setAccelZSelfTest(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_ACCEL_CONFIG, MPU6050_ACONFIG_ZA_ST_BIT, enabled);
}
/** Get full-scale accelerometer range.
* The FS_SEL parameter allows setting the full-scale range of the accelerometer
* sensors, as described in the table below.
*
* <pre>
* 0 = +/- 2g
* 1 = +/- 4g
* 2 = +/- 8g
* 3 = +/- 16g
* </pre>
*
* @return Current full-scale accelerometer range setting
* @see MPU6050_ACCEL_FS_2
* @see MPU6050_RA_ACCEL_CONFIG
* @see MPU6050_ACONFIG_AFS_SEL_BIT
* @see MPU6050_ACONFIG_AFS_SEL_LENGTH
*/
uint8_t MPU6050::getFullScaleAccelRange() {
I2Cdev::readBits(devAddr, MPU6050_RA_ACCEL_CONFIG, MPU6050_ACONFIG_AFS_SEL_BIT, MPU6050_ACONFIG_AFS_SEL_LENGTH, buffer);
return buffer[0];
}
/** Set full-scale accelerometer range.
* @param range New full-scale accelerometer range setting
* @see getFullScaleAccelRange()
*/
void MPU6050::setFullScaleAccelRange(uint8_t range) {
I2Cdev::writeBits(devAddr, MPU6050_RA_ACCEL_CONFIG, MPU6050_ACONFIG_AFS_SEL_BIT, MPU6050_ACONFIG_AFS_SEL_LENGTH, range);
}
/** Get the high-pass filter configuration.
* The DHPF is a filter module in the path leading to motion detectors (Free
* Fall, Motion threshold, and Zero Motion). The high pass filter output is not
* available to the data registers (see Figure in Section 8 of the MPU-6000/
* MPU-6050 Product Specification document).
*
* The high pass filter has three modes:
*
* <pre>
* Reset: The filter output settles to zero within one sample. This
* effectively disables the high pass filter. This mode may be toggled
* to quickly settle the filter.
*
* On: The high pass filter will pass signals above the cut off frequency.
*
* Hold: When triggered, the filter holds the present sample. The filter
* output will be the difference between the input sample and the held
* sample.
* </pre>
*
* <pre>
* ACCEL_HPF | Filter Mode | Cut-off Frequency
* ----------+-------------+------------------
* 0 | Reset | None
* 1 | On | 5Hz
* 2 | On | 2.5Hz
* 3 | On | 1.25Hz
* 4 | On | 0.63Hz
* 7 | Hold | None
* </pre>
*
* @return Current high-pass filter configuration
* @see MPU6050_DHPF_RESET
* @see MPU6050_RA_ACCEL_CONFIG
*/
uint8_t MPU6050::getDHPFMode() {
I2Cdev::readBits(devAddr, MPU6050_RA_ACCEL_CONFIG, MPU6050_ACONFIG_ACCEL_HPF_BIT, MPU6050_ACONFIG_ACCEL_HPF_LENGTH, buffer);
return buffer[0];
}
/** Set the high-pass filter configuration.
* @param bandwidth New high-pass filter configuration
* @see setDHPFMode()
* @see MPU6050_DHPF_RESET
* @see MPU6050_RA_ACCEL_CONFIG
*/
void MPU6050::setDHPFMode(uint8_t bandwidth) {
I2Cdev::writeBits(devAddr, MPU6050_RA_ACCEL_CONFIG, MPU6050_ACONFIG_ACCEL_HPF_BIT, MPU6050_ACONFIG_ACCEL_HPF_LENGTH, bandwidth);
}
// FF_THR register
/** Get free-fall event acceleration threshold.
* This register configures the detection threshold for Free Fall event
* detection. The unit of FF_THR is 1LSB = 2mg. Free Fall is detected when the
* absolute value of the accelerometer measurements for the three axes are each
* less than the detection threshold. This condition increments the Free Fall
* duration counter (Register 30). The Free Fall interrupt is triggered when the
* Free Fall duration counter reaches the time specified in FF_DUR.
*
* For more details on the Free Fall detection interrupt, see Section 8.2 of the
* MPU-6000/MPU-6050 Product Specification document as well as Registers 56 and
* 58 of this document.
*
* @return Current free-fall acceleration threshold value (LSB = 2mg)
* @see MPU6050_RA_FF_THR
*/
uint8_t MPU6050::getFreefallDetectionThreshold() {
I2Cdev::readByte(devAddr, MPU6050_RA_FF_THR, buffer);
return buffer[0];
}
/** Get free-fall event acceleration threshold.
* @param threshold New free-fall acceleration threshold value (LSB = 2mg)
* @see getFreefallDetectionThreshold()
* @see MPU6050_RA_FF_THR
*/
void MPU6050::setFreefallDetectionThreshold(uint8_t threshold) {
I2Cdev::writeByte(devAddr, MPU6050_RA_FF_THR, threshold);
}
// FF_DUR register
/** Get free-fall event duration threshold.
* This register configures the duration counter threshold for Free Fall event
* detection. The duration counter ticks at 1kHz, therefore FF_DUR has a unit
* of 1 LSB = 1 ms.
*
* The Free Fall duration counter increments while the absolute value of the
* accelerometer measurements are each less than the detection threshold
* (Register 29). The Free Fall interrupt is triggered when the Free Fall
* duration counter reaches the time specified in this register.
*
* For more details on the Free Fall detection interrupt, see Section 8.2 of
* the MPU-6000/MPU-6050 Product Specification document as well as Registers 56
* and 58 of this document.
*
* @return Current free-fall duration threshold value (LSB = 1ms)
* @see MPU6050_RA_FF_DUR
*/
uint8_t MPU6050::getFreefallDetectionDuration() {
I2Cdev::readByte(devAddr, MPU6050_RA_FF_DUR, buffer);
return buffer[0];
}
/** Get free-fall event duration threshold.
* @param duration New free-fall duration threshold value (LSB = 1ms)
* @see getFreefallDetectionDuration()
* @see MPU6050_RA_FF_DUR
*/
void MPU6050::setFreefallDetectionDuration(uint8_t duration) {
I2Cdev::writeByte(devAddr, MPU6050_RA_FF_DUR, duration);
}
// MOT_THR register
/** Get motion detection event acceleration threshold.
* This register configures the detection threshold for Motion interrupt
* generation. The unit of MOT_THR is 1LSB = 2mg. Motion is detected when the
* absolute value of any of the accelerometer measurements exceeds this Motion
* detection threshold. This condition increments the Motion detection duration
* counter (Register 32). The Motion detection interrupt is triggered when the
* Motion Detection counter reaches the time count specified in MOT_DUR
* (Register 32).
*
* The Motion interrupt will indicate the axis and polarity of detected motion
* in MOT_DETECT_STATUS (Register 97).
*
* For more details on the Motion detection interrupt, see Section 8.3 of the
* MPU-6000/MPU-6050 Product Specification document as well as Registers 56 and
* 58 of this document.
*
* @return Current motion detection acceleration threshold value (LSB = 2mg)
* @see MPU6050_RA_MOT_THR
*/
uint8_t MPU6050::getMotionDetectionThreshold() {
I2Cdev::readByte(devAddr, MPU6050_RA_MOT_THR, buffer);
return buffer[0];
}
/** Set free-fall event acceleration threshold.
* @param threshold New motion detection acceleration threshold value (LSB = 2mg)
* @see getMotionDetectionThreshold()
* @see MPU6050_RA_MOT_THR
*/
void MPU6050::setMotionDetectionThreshold(uint8_t threshold) {
I2Cdev::writeByte(devAddr, MPU6050_RA_MOT_THR, threshold);
}
// MOT_DUR register
/** Get motion detection event duration threshold.
* This register configures the duration counter threshold for Motion interrupt
* generation. The duration counter ticks at 1 kHz, therefore MOT_DUR has a unit
* of 1LSB = 1ms. The Motion detection duration counter increments when the
* absolute value of any of the accelerometer measurements exceeds the Motion
* detection threshold (Register 31). The Motion detection interrupt is
* triggered when the Motion detection counter reaches the time count specified
* in this register.
*
* For more details on the Motion detection interrupt, see Section 8.3 of the
* MPU-6000/MPU-6050 Product Specification document.
*
* @return Current motion detection duration threshold value (LSB = 1ms)
* @see MPU6050_RA_MOT_DUR
*/
uint8_t MPU6050::getMotionDetectionDuration() {
I2Cdev::readByte(devAddr, MPU6050_RA_MOT_DUR, buffer);
return buffer[0];
}
/** Set motion detection event duration threshold.
* @param duration New motion detection duration threshold value (LSB = 1ms)
* @see getMotionDetectionDuration()
* @see MPU6050_RA_MOT_DUR
*/
void MPU6050::setMotionDetectionDuration(uint8_t duration) {
I2Cdev::writeByte(devAddr, MPU6050_RA_MOT_DUR, duration);
}
// ZRMOT_THR register
/** Get zero motion detection event acceleration threshold.
* This register configures the detection threshold for Zero Motion interrupt
* generation. The unit of ZRMOT_THR is 1LSB = 2mg. Zero Motion is detected when
* the absolute value of the accelerometer measurements for the 3 axes are each
* less than the detection threshold. This condition increments the Zero Motion
* duration counter (Register 34). The Zero Motion interrupt is triggered when
* the Zero Motion duration counter reaches the time count specified in
* ZRMOT_DUR (Register 34).
*
* Unlike Free Fall or Motion detection, Zero Motion detection triggers an
* interrupt both when Zero Motion is first detected and when Zero Motion is no
* longer detected.
*
* When a zero motion event is detected, a Zero Motion Status will be indicated
* in the MOT_DETECT_STATUS register (Register 97). When a motion-to-zero-motion
* condition is detected, the status bit is set to 1. When a zero-motion-to-
* motion condition is detected, the status bit is set to 0.
*
* For more details on the Zero Motion detection interrupt, see Section 8.4 of
* the MPU-6000/MPU-6050 Product Specification document as well as Registers 56
* and 58 of this document.
*
* @return Current zero motion detection acceleration threshold value (LSB = 2mg)
* @see MPU6050_RA_ZRMOT_THR
*/
uint8_t MPU6050::getZeroMotionDetectionThreshold() {
I2Cdev::readByte(devAddr, MPU6050_RA_ZRMOT_THR, buffer);
return buffer[0];
}
/** Set zero motion detection event acceleration threshold.
* @param threshold New zero motion detection acceleration threshold value (LSB = 2mg)
* @see getZeroMotionDetectionThreshold()
* @see MPU6050_RA_ZRMOT_THR
*/
void MPU6050::setZeroMotionDetectionThreshold(uint8_t threshold) {
I2Cdev::writeByte(devAddr, MPU6050_RA_ZRMOT_THR, threshold);
}
// ZRMOT_DUR register
/** Get zero motion detection event duration threshold.
* This register configures the duration counter threshold for Zero Motion
* interrupt generation. The duration counter ticks at 16 Hz, therefore
* ZRMOT_DUR has a unit of 1 LSB = 64 ms. The Zero Motion duration counter
* increments while the absolute value of the accelerometer measurements are
* each less than the detection threshold (Register 33). The Zero Motion
* interrupt is triggered when the Zero Motion duration counter reaches the time
* count specified in this register.
*
* For more details on the Zero Motion detection interrupt, see Section 8.4 of
* the MPU-6000/MPU-6050 Product Specification document, as well as Registers 56
* and 58 of this document.
*
* @return Current zero motion detection duration threshold value (LSB = 64ms)
* @see MPU6050_RA_ZRMOT_DUR
*/
uint8_t MPU6050::getZeroMotionDetectionDuration() {
I2Cdev::readByte(devAddr, MPU6050_RA_ZRMOT_DUR, buffer);
return buffer[0];
}
/** Set zero motion detection event duration threshold.
* @param duration New zero motion detection duration threshold value (LSB = 1ms)
* @see getZeroMotionDetectionDuration()
* @see MPU6050_RA_ZRMOT_DUR
*/
void MPU6050::setZeroMotionDetectionDuration(uint8_t duration) {
I2Cdev::writeByte(devAddr, MPU6050_RA_ZRMOT_DUR, duration);
}
// FIFO_EN register
/** Get temperature FIFO enabled value.
* When set to 1, this bit enables TEMP_OUT_H and TEMP_OUT_L (Registers 65 and
* 66) to be written into the FIFO buffer.
* @return Current temperature FIFO enabled value
* @see MPU6050_RA_FIFO_EN
*/
bool MPU6050::getTempFIFOEnabled() {
I2Cdev::readBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_TEMP_FIFO_EN_BIT, buffer);
return buffer[0];
}
/** Set temperature FIFO enabled value.
* @param enabled New temperature FIFO enabled value
* @see getTempFIFOEnabled()
* @see MPU6050_RA_FIFO_EN
*/
void MPU6050::setTempFIFOEnabled(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_TEMP_FIFO_EN_BIT, enabled);
}
/** Get gyroscope X-axis FIFO enabled value.
* When set to 1, this bit enables GYRO_XOUT_H and GYRO_XOUT_L (Registers 67 and
* 68) to be written into the FIFO buffer.
* @return Current gyroscope X-axis FIFO enabled value
* @see MPU6050_RA_FIFO_EN
*/
bool MPU6050::getXGyroFIFOEnabled() {
I2Cdev::readBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_XG_FIFO_EN_BIT, buffer);
return buffer[0];
}
/** Set gyroscope X-axis FIFO enabled value.
* @param enabled New gyroscope X-axis FIFO enabled value
* @see getXGyroFIFOEnabled()
* @see MPU6050_RA_FIFO_EN
*/
void MPU6050::setXGyroFIFOEnabled(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_XG_FIFO_EN_BIT, enabled);
}
/** Get gyroscope Y-axis FIFO enabled value.
* When set to 1, this bit enables GYRO_YOUT_H and GYRO_YOUT_L (Registers 69 and
* 70) to be written into the FIFO buffer.
* @return Current gyroscope Y-axis FIFO enabled value
* @see MPU6050_RA_FIFO_EN
*/
bool MPU6050::getYGyroFIFOEnabled() {
I2Cdev::readBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_YG_FIFO_EN_BIT, buffer);
return buffer[0];
}
/** Set gyroscope Y-axis FIFO enabled value.
* @param enabled New gyroscope Y-axis FIFO enabled value
* @see getYGyroFIFOEnabled()
* @see MPU6050_RA_FIFO_EN
*/
void MPU6050::setYGyroFIFOEnabled(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_YG_FIFO_EN_BIT, enabled);
}
/** Get gyroscope Z-axis FIFO enabled value.
* When set to 1, this bit enables GYRO_ZOUT_H and GYRO_ZOUT_L (Registers 71 and
* 72) to be written into the FIFO buffer.
* @return Current gyroscope Z-axis FIFO enabled value
* @see MPU6050_RA_FIFO_EN
*/
bool MPU6050::getZGyroFIFOEnabled() {
I2Cdev::readBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_ZG_FIFO_EN_BIT, buffer);
return buffer[0];
}
/** Set gyroscope Z-axis FIFO enabled value.
* @param enabled New gyroscope Z-axis FIFO enabled value
* @see getZGyroFIFOEnabled()
* @see MPU6050_RA_FIFO_EN
*/
void MPU6050::setZGyroFIFOEnabled(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_ZG_FIFO_EN_BIT, enabled);
}
/** Get accelerometer FIFO enabled value.
* When set to 1, this bit enables ACCEL_XOUT_H, ACCEL_XOUT_L, ACCEL_YOUT_H,
* ACCEL_YOUT_L, ACCEL_ZOUT_H, and ACCEL_ZOUT_L (Registers 59 to 64) to be
* written into the FIFO buffer.
* @return Current accelerometer FIFO enabled value
* @see MPU6050_RA_FIFO_EN
*/
bool MPU6050::getAccelFIFOEnabled() {
I2Cdev::readBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_ACCEL_FIFO_EN_BIT, buffer);
return buffer[0];
}
/** Set accelerometer FIFO enabled value.
* @param enabled New accelerometer FIFO enabled value
* @see getAccelFIFOEnabled()
* @see MPU6050_RA_FIFO_EN
*/
void MPU6050::setAccelFIFOEnabled(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_ACCEL_FIFO_EN_BIT, enabled);
}
/** Get Slave 2 FIFO enabled value.
* When set to 1, this bit enables EXT_SENS_DATA registers (Registers 73 to 96)
* associated with Slave 2 to be written into the FIFO buffer.
* @return Current Slave 2 FIFO enabled value
* @see MPU6050_RA_FIFO_EN
*/
bool MPU6050::getSlave2FIFOEnabled() {
I2Cdev::readBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_SLV2_FIFO_EN_BIT, buffer);
return buffer[0];
}
/** Set Slave 2 FIFO enabled value.
* @param enabled New Slave 2 FIFO enabled value
* @see getSlave2FIFOEnabled()
* @see MPU6050_RA_FIFO_EN
*/
void MPU6050::setSlave2FIFOEnabled(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_SLV2_FIFO_EN_BIT, enabled);
}
/** Get Slave 1 FIFO enabled value.
* When set to 1, this bit enables EXT_SENS_DATA registers (Registers 73 to 96)
* associated with Slave 1 to be written into the FIFO buffer.
* @return Current Slave 1 FIFO enabled value
* @see MPU6050_RA_FIFO_EN
*/
bool MPU6050::getSlave1FIFOEnabled() {
I2Cdev::readBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_SLV1_FIFO_EN_BIT, buffer);
return buffer[0];
}
/** Set Slave 1 FIFO enabled value.
* @param enabled New Slave 1 FIFO enabled value
* @see getSlave1FIFOEnabled()
* @see MPU6050_RA_FIFO_EN
*/
void MPU6050::setSlave1FIFOEnabled(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_SLV1_FIFO_EN_BIT, enabled);
}
/** Get Slave 0 FIFO enabled value.
* When set to 1, this bit enables EXT_SENS_DATA registers (Registers 73 to 96)
* associated with Slave 0 to be written into the FIFO buffer.
* @return Current Slave 0 FIFO enabled value
* @see MPU6050_RA_FIFO_EN
*/
bool MPU6050::getSlave0FIFOEnabled() {
I2Cdev::readBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_SLV0_FIFO_EN_BIT, buffer);
return buffer[0];
}
/** Set Slave 0 FIFO enabled value.
* @param enabled New Slave 0 FIFO enabled value
* @see getSlave0FIFOEnabled()
* @see MPU6050_RA_FIFO_EN
*/
void MPU6050::setSlave0FIFOEnabled(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_FIFO_EN, MPU6050_SLV0_FIFO_EN_BIT, enabled);
}
// I2C_MST_CTRL register
/** Get multi-master enabled value.
* Multi-master capability allows multiple I2C masters to operate on the same
* bus. In circuits where multi-master capability is required, set MULT_MST_EN
* to 1. This will increase current drawn by approximately 30uA.
*
* In circuits where multi-master capability is required, the state of the I2C
* bus must always be monitored by each separate I2C Master. Before an I2C
* Master can assume arbitration of the bus, it must first confirm that no other
* I2C Master has arbitration of the bus. When MULT_MST_EN is set to 1, the
* MPU-60X0's bus arbitration detection logic is turned on, enabling it to
* detect when the bus is available.
*
* @return Current multi-master enabled value
* @see MPU6050_RA_I2C_MST_CTRL
*/
bool MPU6050::getMultiMasterEnabled() {
I2Cdev::readBit(devAddr, MPU6050_RA_I2C_MST_CTRL, MPU6050_MULT_MST_EN_BIT, buffer);
return buffer[0];
}
/** Set multi-master enabled value.
* @param enabled New multi-master enabled value
* @see getMultiMasterEnabled()
* @see MPU6050_RA_I2C_MST_CTRL
*/
void MPU6050::setMultiMasterEnabled(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_I2C_MST_CTRL, MPU6050_MULT_MST_EN_BIT, enabled);
}
/** Get wait-for-external-sensor-data enabled value.
* When the WAIT_FOR_ES bit is set to 1, the Data Ready interrupt will be
* delayed until External Sensor data from the Slave Devices are loaded into the
* EXT_SENS_DATA registers. This is used to ensure that both the internal sensor
* data (i.e. from gyro and accel) and external sensor data have been loaded to
* their respective data registers (i.e. the data is synced) when the Data Ready
* interrupt is triggered.
*
* @return Current wait-for-external-sensor-data enabled value
* @see MPU6050_RA_I2C_MST_CTRL
*/
bool MPU6050::getWaitForExternalSensorEnabled() {
I2Cdev::readBit(devAddr, MPU6050_RA_I2C_MST_CTRL, MPU6050_WAIT_FOR_ES_BIT, buffer);
return buffer[0];
}
/** Set wait-for-external-sensor-data enabled value.
* @param enabled New wait-for-external-sensor-data enabled value
* @see getWaitForExternalSensorEnabled()
* @see MPU6050_RA_I2C_MST_CTRL
*/
void MPU6050::setWaitForExternalSensorEnabled(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_I2C_MST_CTRL, MPU6050_WAIT_FOR_ES_BIT, enabled);
}
/** Get Slave 3 FIFO enabled value.
* When set to 1, this bit enables EXT_SENS_DATA registers (Registers 73 to 96)
* associated with Slave 3 to be written into the FIFO buffer.
* @return Current Slave 3 FIFO enabled value
* @see MPU6050_RA_MST_CTRL
*/
bool MPU6050::getSlave3FIFOEnabled() {
I2Cdev::readBit(devAddr, MPU6050_RA_I2C_MST_CTRL, MPU6050_SLV_3_FIFO_EN_BIT, buffer);
return buffer[0];
}
/** Set Slave 3 FIFO enabled value.
* @param enabled New Slave 3 FIFO enabled value
* @see getSlave3FIFOEnabled()
* @see MPU6050_RA_MST_CTRL
*/
void MPU6050::setSlave3FIFOEnabled(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_I2C_MST_CTRL, MPU6050_SLV_3_FIFO_EN_BIT, enabled);
}
/** Get slave read/write transition enabled value.
* The I2C_MST_P_NSR bit configures the I2C Master's transition from one slave
* read to the next slave read. If the bit equals 0, there will be a restart
* between reads. If the bit equals 1, there will be a stop followed by a start
* of the following read. When a write transaction follows a read transaction,
* the stop followed by a start of the successive write will be always used.
*
* @return Current slave read/write transition enabled value
* @see MPU6050_RA_I2C_MST_CTRL
*/
bool MPU6050::getSlaveReadWriteTransitionEnabled() {
I2Cdev::readBit(devAddr, MPU6050_RA_I2C_MST_CTRL, MPU6050_I2C_MST_P_NSR_BIT, buffer);
return buffer[0];
}
/** Set slave read/write transition enabled value.
* @param enabled New slave read/write transition enabled value
* @see getSlaveReadWriteTransitionEnabled()
* @see MPU6050_RA_I2C_MST_CTRL
*/
void MPU6050::setSlaveReadWriteTransitionEnabled(bool enabled) {
I2Cdev::writeBit(devAddr, MPU6050_RA_I2C_MST_CTRL, MPU6050_I2C_MST_P_NSR_BIT, enabled);
}
/** Get I2C master clock speed.
* I2C_MST_CLK is a 4 bit unsigned value which configures a divider on the
* MPU-60X0 internal 8MHz clock. It sets the I2C master clock speed according to
* the following table:
*
* <pre>
* I2C_MST_CLK | I2C Master Clock Speed | 8MHz Clock Divider
* ------------+------------------------+-------------------
* 0 | 348kHz | 23
* 1 | 333kHz | 24
* 2 | 320kHz | 25
* 3 | 308kHz | 26
* 4 | 296kHz | 27
* 5 | 286kHz | 28
* 6 | 276kHz | 29
* 7 | 267kHz | 30
* 8 | 258kHz | 31
* 9 | 500kHz | 16
* 10 | 471kHz | 17
* 11 | 444kHz | 18
* 12 | 421kHz | 19
* 13 | 400kHz | 20
* 14 | 381kHz | 21
* 15 | 364kHz | 22
* </pre>
*
* @return Current I2C master clock speed
* @see MPU6050_RA_I2C_MST_CTRL
*/
uint8_t MPU6050::getMasterClockSpeed() {
I2Cdev::readBits(devAddr, MPU6050_RA_I2C_MST_CTRL, MPU6050_I2C_MST_CLK_BIT, MPU6050_I2C_MST_CLK_LENGTH, buffer);
return buffer[0];
}
/** Set I2C master clock speed.
* @reparam speed Current I2C master clock speed
* @see MPU6050_RA_I2C_MST_CTRL
*/
void MPU6050::setMasterClockSpeed(uint8_t speed) {
I2Cdev::writeBits(devAddr, MPU6050_RA_I2C_MST_CTRL, MPU6050_I2C_MST_CLK_BIT, MPU6050_I2C_MST_CLK_LENGTH, speed);
}
// I2C_SLV* registers (Slave 0-3)
/** Get the I2C address of the specified slave (0-3).
* Note that Bit 7 (MSB) controls read/write mode. If Bit 7 is set, it's a read
* operation, and if it is cleared, then it's a write operation. The remaining
* bits (6-0) are the 7-bit device address of the slave device.
*
* In read mode, the result of the read is placed in the lowest available
* EXT_SENS_DATA register. For further information regarding the allocation of
* read results, please refer to the EXT_SENS_DATA register description
* (Registers 73 - 96).
*
* The MPU-6050 supports a total of five slaves, but Slave 4 has unique
* characteristics, and so it has its own functions (getSlave4* and setSlave4*).
*
* I2C data transactions are performed at the Sample Rate, as defined in
* Register 25. The user is responsible for ensuring that I2C data transactions
* to and from each enabled Slave can be completed within a single period of the
* Sample Rate.
*
* The I2C slave access rate can be reduced relative to the Sample Rate. This
* reduced access rate is determined by I2C_MST_DLY (Register 52). Whether a
* slave's access rate is reduced relative to the Sample Rate is determined by
* I2C_MST_DELAY_CTRL (Register 103).
*
* The processing order for the slaves is fixed. The sequence followed for
* processing the slaves is Slave 0, Slave 1, Slave 2, Slave 3 and Slave 4. If a
* particular Slave is disabled it will be skipped.
*
* Each slave can either be accessed at the sample rate or at a reduced sample
* rate. In a case where some slaves are accessed at the Sample Rate and some
* slaves are accessed at the reduced rate, the sequence of accessing the slaves
* (Slave 0 to Slave 4) is still followed. However, the reduced rate slaves will
* be skipped if their access rate dictates that they should not be accessed
* during that particular cycle. For further information regarding the reduced
* access rate, please refer to Register 52. Whether a slave is accessed at the
* Sample Rate or at the reduced rate is determined by the Delay Enable bits in
* Register 103.
*
* @param num Slave number (0-3)
* @return Current address for specified slave
* @see MPU6050_RA_I2C_SLV0_ADDR
*/
uint8_t MPU6050::getSlaveAddress(uint8_t num) {
if (num > 3) return 0;
I2Cdev::readByte(devAddr, MPU6050_RA_I2C_SLV0_ADDR + num*3, buffer);
return buffer[0];
}
/** Set the I2C address of the specified slave (0-3).
* @param num Slave number (0-3)
* @param address New address for specified slave
* @see getSlaveAddress()
* @see MPU6050_RA_I2C_SLV0_ADDR
*/
void MPU6050::setSlaveAddress(uint8_t num, uint8_t address) {
if (num > 3) return;
I2Cdev::writeByte(devAddr, MPU6050_RA_I2C_SLV0_ADDR + num*3, address);
}
/** Get the active internal register for the specified slave (0-3).
* Read/write operations for this slave will be done to whatever internal
* register address is stored in this MPU register.
*
* The MPU-6050 supports a total of five slaves, but Slave 4 has unique
* characteristics, and so it has its own functions.
*
* @param num Slave number (0-3)
* @return Current active register for specified slave
* @see MPU6050_RA_I2C_SLV0_REG
*/
uint8_t MPU6050::getSlaveRegister(uint8_t num) {
if (num > 3) return 0;
I2Cdev::readByte(devAddr, MPU6050_RA_I2C_SLV0_REG + num*3, buffer);
return buffer[0];
}
/** Set the active internal register for the specified slave (0-3).
* @param num Slave number (0-3)
* @param reg New active register for specified slave
* @see getSlaveRegister()
* @see MPU6050_RA_I2C_SLV0_REG
*/
void MPU6050::setSlaveRegister(uint8_t num, uint8_t reg) {
if (num > 3) return;
I2Cdev::writeByte(devAddr, MPU6050_RA_I2C_SLV0_REG + num*3, reg);
}
/** Get the enabled value for the specified slave (0-3).
* When set to 1, this bit enables Slave 0 for data transfer operations. When
* cleared to 0, this bit disables Slave 0 from data transfer operations.
* @param num Slave number (0-3)
* @return Current enabled value for specified slave
* @see MPU6050_RA_I2C_SLV0_CTRL
*/
bool MPU6050::getSlaveEnabled(uint8_t num) {
if (num > 3) return 0;
I2Cdev::readBit(devAddr, MPU6050_RA_I2C_SLV0_CTRL + num*3, MPU6050_I2C_SLV_EN_BIT, buffer);
return buffer[0];
}
/** Set the enabled value for the specified slave (0-3).
* @param num Slave number (0-3)
* @param enabled New enabled value for specified slave
* @see getSlaveEnabled()
* @see MPU6050_RA_I2C_SLV0_CTRL
*/
void MPU6050::setSlaveEnabled(uint8_t num, bool enabled) {
if (num > 3) return;
I2Cdev::writeBit(devAddr, MPU6050_RA_I2C_SLV0_CTRL + num*3, MPU6050_I2C_SLV_EN_BIT, enabled);
}
/** Get word pair byte-swapping enabled for the specified slave (0-3).
* When set to 1, this bit enables byte swapping. When byte swapping is enabled,
* the high and low bytes of a word pair are swapped. Please refer to
* I2C_SLV0_GRP for the pairing convention of the word pairs. When cleared to 0,
* bytes transferred to and from Slave 0 will be written to EXT_SENS_DATA
* registers in the order they were transferred.
*
* @param num Slave number (0-3)
* @return Current word pair byte-swapping enabled value for specified slave
* @see MPU6050_RA_I2C_SLV0_CTRL
*/
bool MPU6050::getSlaveWordByteSwap(uint8_t num) {
if (num > 3) return 0;
I2Cdev::readBit(devAddr, MPU6050_RA_I2C_SLV0_CTRL + num*3, MPU6050_I2C_SLV_BYTE_SW_BIT, buffer);
return buffer[0];
}
/** Set word pair byte-swapping enabled for the specified slave (0-3).
* @param num Slave number (0-3)
* @param enabled New word pair byte-swapping enabled value for specified slave
* @see getSlaveWordByteSwap()
* @see MPU6050_RA_I2C_SLV0_CTRL
*/
void MPU6050::setSlaveWordByteSwap(uint8_t num, bool enabled) {
if (num > 3) return;
I2Cdev::writeBit(devAddr, MPU6050_RA_I2C_SLV0_CTRL + num*3, MPU6050_I2C_SLV_BYTE_SW_BIT, enabled);
}
/** Get write mode for the specified slave (0-3).
* When set to 1, the transaction will read or write data only. When cleared to
* 0, the transaction will write a register address prior to reading or writing
* data. This should equal 0 when specifying the register address within the
* Slave device to/from which the ensuing data transaction will take place.
*
* @param num Slave number (0-3)
* @return Current write mode for specified slave (0 = register address + data, 1 = data only)
* @see MPU6050_RA_I2C_SLV0_CTRL
*/
bool MPU6050::getSlaveWriteMode(uint8_t num) {
...
This file has been truncated, please download it to see its full contents.
#include <SPI.h>
#include <RF24.h>
#include <nRF24L01.h>
#include "I2Cdev.h"
#include "MPU6050_6Axis_MotionApps20.h"
RF24 radio(7,8);
const byte address[6]= "00001";
int posX=A2;
int posY=A3;
int Button=6;
boolean etat=0;
int Pos[2];
int data[2];
char x[2];
/*struct package
{
int pos;
int dir;
};
typedef struct package Package;
Package data; */
//Motor Alpha(8,12,9) ; // (pin1,pin2,pinP)
//Motor Beta(7,4,10); //(pin1,pin2,pinP)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
#include "Wire.h"
#endif
MPU6050 mpu;
#define OUTPUT_READABLE_YAWPITCHROLL
#define LED_PIN 13
bool blinkState = false;
// MPU control/status vars
bool dmpReady = false; // set true if DMP init was successful
uint8_t mpuIntStatus; // holds actual interrupt status byte from MPU
uint8_t devStatus; // return status after each device operation (0 = success, !0 = error)
uint16_t packetSize; // expected DMP packet size (default is 42 bytes)
uint16_t fifoCount; // count of all bytes currently in FIFO
uint8_t fifoBuffer[64]; // FIFO storage buffer
// orientation/motion vars
Quaternion q; // [w, x, y, z] quaternion container
VectorInt16 aa; // [x, y, z] accel sensor measurements
VectorInt16 aaReal; // [x, y, z] gravity-free accel sensor measurements
VectorInt16 aaWorld; // [x, y, z] world-frame accel sensor measurements
VectorFloat gravity; // [x, y, z] gravity vector
float euler[3]; // [psi, theta, phi] Euler angle container
float ypr[3]; // [yaw, pitch, roll] yaw/pitch/roll container and gravity vector
// packet structure for InvenSense teapot demo
uint8_t teapotPacket[14] = { '$', 0x02, 0,0, 0,0, 0,0, 0,0, 0x00, 0x00, '\r', '\n' };
// ================================================================
// === INTERRUPT DETECTION ROUTINE ===
// ================================================================
volatile bool mpuInterrupt = false; // indicates whether MPU interrupt pin has gone high
void dmpDataReady() {
mpuInterrupt = true;
}
// ================================================================
// === INITIAL SETUP ===
// ================================================================
void setup() {
// join I2C bus (I2Cdev library doesn't do this automatically)
#if I2CDEV_IMPLEMENTATION == I2CDEV_ARDUINO_WIRE
Wire.begin();
TWBR = 24; // 400kHz I2C clock (200kHz if CPU is 8MHz)
#elif I2CDEV_IMPLEMENTATION == I2CDEV_BUILTIN_FASTWIRE
Fastwire::setup(400, true);
#endif
//put on the output the pins of motors
// Alpha.begin();
// Beta.begin();
// vw_set_tx_pin(12);
//vw_setup(2000);
// initialize serial communication
// (115200 chosen because it is required for Teapot Demo output, but it's
// really up to you depending on your project)
Serial.begin(115200);
while (!Serial); // wait for Leonardo enumeration, others continue immediately
mpu.initialize();
devStatus = mpu.dmpInitialize();
// supply your own gyro offsets here, scaled for min sensitivity
mpu.setXGyroOffset(220);
mpu.setYGyroOffset(76);
mpu.setZGyroOffset(-85);
mpu.setZAccelOffset(1788); // 1688 factory default for my test chip
// make sure it worked (returns 0 if so)
if (devStatus == 0) {
mpu.setDMPEnabled(true);
// enable Arduino interrupt detection
//Serial.println(F("Enabling interrupt detection (Arduino external interrupt 0)..."));
attachInterrupt(0, dmpDataReady, RISING);
mpuIntStatus = mpu.getIntStatus();
// set our DMP Ready flag so the main loop() function knows it's okay to use it
//Serial.println(F("DMP ready! Waiting for first interrupt..."));
dmpReady = true;
// get expected DMP packet size for later comparison
packetSize = mpu.dmpGetFIFOPacketSize();
} else {
Serial.print(devStatus);
Serial.println(F(")"));
}
radio.begin();
radio.openWritingPipe(address);
radio.setPALevel(RF24_PA_MAX);
radio.stopListening();
pinMode(posX,INPUT);
pinMode(posY,INPUT);
pinMode(Button,INPUT_PULLUP);
// configure LED for output
}
// ================================================================
// === MAIN PROGRAM LOOP ===
// ================================================================
void loop() {
// if programming failed, don't try to do anything
if (!dmpReady) return;
// wait for MPU interrupt or extra packet(s) available
while (!mpuInterrupt && fifoCount < packetSize) {
}
// reset interrupt flag and get INT_STATUS byte
mpuInterrupt = false;
mpuIntStatus = mpu.getIntStatus();
// get current FIFO count
fifoCount = mpu.getFIFOCount();
// check for overflow (this should never happen unless our code is too inefficient)
if ((mpuIntStatus & 0x10) || fifoCount == 1024) {
// reset so we can continue cleanly
mpu.resetFIFO();
//Serial.println(F("FIFO overflow!"));
// otherwise, check for DMP data ready interrupt (this should happen frequently)
} else if (mpuIntStatus & 0x02) {
// wait for correct available data length, should be a VERY short wait
while (fifoCount < packetSize) fifoCount = mpu.getFIFOCount();
// read a packet from FIFO
mpu.getFIFOBytes(fifoBuffer, packetSize);
// track FIFO count here in case there is > 1 packet available
// (this lets us immediately read more without waiting for an interrupt)
fifoCount -= packetSize;
#ifdef OUTPUT_READABLE_YAWPITCHROLL
// display Euler angles in degrees
mpu.dmpGetQuaternion(&q, fifoBuffer);
mpu.dmpGetGravity(&gravity, &q);
mpu.dmpGetYawPitchRoll(ypr, &q, &gravity);
/*
Serial.print("Phi: ");
Serial.print(ypr[2] * 180/M_PI);
Serial.print("\t Theta: ");
Serial.print(" ");
Serial.print(ypr[1] * 180/M_PI);
Serial.print("\t Psi: ");
Serial.print(" ");
Serial.println(ypr[0] * 180/M_PI);
*/
//delay(100);
#endif
//int valeurSW=!digitalRead(Button);
//if(valeurSW==1) {delay(250); etat=!etat;}
if (!digitalRead(Button)) {delay(250); etat=!etat; delay(200);}
if (etat==1) {
delay(150);
int X = ypr[1] * 180/M_PI;
int Y = ypr[2] * 180/M_PI;
//int Z= ypr[0] * 180/M_PI;
data[0]=map(X,-85,85,0,180);
data[1]=map(Y,-90,90,0,180);
//data[2]=map(Z,-90,90,0,255);
// if(data[2]<0) {data[2]=0;}
// else if (data[2]>255) {data[2]=255;}
if (data[1]<0) {data[1]=0;}
else if (data[1]>180) {data[1]=180; }
if (data[0]<0) {data[0]=0;}
else if (data[0]>180) {data[0]=180;}
if (data[0]<60) {
x[1]='F';
radio.write(x,sizeof(x));
}
else if(data[0]>103){
x[1]='R';
radio.write(x,sizeof(x));
}
else if (data[0]>60 && data[0] <103) {
x[1]='S';
radio.write(x,sizeof(x));
}
if (data[1] > 103) {
x[0]='D';
radio.write(x,sizeof(x));
}
else if (data[1] <60) {
x[0]='G';
radio.write(x,sizeof(x));
}
else if (data[1]<103 && data[1] >60) {
x[0]='S';
radio.write(x,sizeof(x));
}
// radio.write(data,sizeof(data));
Serial.print("Axe X :") ; Serial.print("\t"); Serial.print(x[0]); Serial.print("\t");
Serial.print("Axe Y :") ; Serial.print("\t"); Serial.print(x[1]); Serial.println("\t");
// Serial.print("Axe Z :"); Serial.print("\t"); Serial.println(data[2]);
}
else if(etat ==0) {
delay(150);
char x[2];
data[0]=map(analogRead(posX),0,1023,0,180);
data[1]=map(analogRead(posY),0,1023,0,180);
if (data[0]>100) {
x[0]='D';
radio.write(x,sizeof(x));
}
else if (data[0]<80) {
x[0]='G';
radio.write(x,sizeof(x));
}
else if (data[0]==91) {
x[0]='S';
radio.write(x,sizeof(x));
}
if (data[1]>100) {
x[1]='F';
radio.write(x,sizeof(x));
}
else if (data[1]<80) {
x[1]='R';
radio.write(x,sizeof(x));
}
else if (data[1]>80 && data[1] <100 ) {
x[1]='S';
radio.write(x,sizeof(x));
}
// radio.write(data,sizeof(data));
Serial.print("Joy X :") ; Serial.print("\t"); Serial.print(data[0]); Serial.print("\t"); Serial.print(x[0]); Serial.print("\t");
Serial.print("Joy Y :") ; Serial.print("\t"); Serial.print(data[1]); Serial.print("\t"); Serial.println(x[1]);
}
}
}
// I2Cdev library collection - MPU6050 I2C device class
// Based on InvenSense MPU-6050 register map document rev. 2.0, 5/19/2011 (RM-MPU-6000A-00)
// 10/3/2011 by Jeff Rowberg <jeff@rowberg.net>
// Updates should (hopefully) always be available at https://github.com/jrowberg/i2cdevlib
//
// Changelog:
// ... - ongoing debug release
// NOTE: THIS IS ONLY A PARIAL RELEASE. THIS DEVICE CLASS IS CURRENTLY UNDERGOING ACTIVE
// DEVELOPMENT AND IS STILL MISSING SOME IMPORTANT FEATURES. PLEASE KEEP THIS IN MIND IF
// YOU DECIDE TO USE THIS PARTICULAR CODE FOR ANYTHING.
/* ============================================
I2Cdev device library code is placed under the MIT license
Copyright (c) 2012 Jeff Rowberg
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
THE SOFTWARE.
===============================================
*/
#ifndef _MPU6050_H_
#define _MPU6050_H_
#include "I2Cdev.h"
//#include <avr/pgmspace.h>
#define MPU6050_ADDRESS_AD0_LOW 0x68 // address pin low (GND), default for InvenSense evaluation board
#define MPU6050_ADDRESS_AD0_HIGH 0x69 // address pin high (VCC)
#define MPU6050_DEFAULT_ADDRESS MPU6050_ADDRESS_AD0_LOW
#define MPU6050_RA_XG_OFFS_TC 0x00 //[7] PWR_MODE, [6:1] XG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_YG_OFFS_TC 0x01 //[7] PWR_MODE, [6:1] YG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_ZG_OFFS_TC 0x02 //[7] PWR_MODE, [6:1] ZG_OFFS_TC, [0] OTP_BNK_VLD
#define MPU6050_RA_X_FINE_GAIN 0x03 //[7:0] X_FINE_GAIN
#define MPU6050_RA_Y_FINE_GAIN 0x04 //[7:0] Y_FINE_GAIN
#define MPU6050_RA_Z_FINE_GAIN 0x05 //[7:0] Z_FINE_GAIN
#define MPU6050_RA_XA_OFFS_H 0x06 //[15:0] XA_OFFS
#define MPU6050_RA_XA_OFFS_L_TC 0x07
#define MPU6050_RA_YA_OFFS_H 0x08 //[15:0] YA_OFFS
#define MPU6050_RA_YA_OFFS_L_TC 0x09
#define MPU6050_RA_ZA_OFFS_H 0x0A //[15:0] ZA_OFFS
#define MPU6050_RA_ZA_OFFS_L_TC 0x0B
#define MPU6050_RA_XG_OFFS_USRH 0x13 //[15:0] XG_OFFS_USR
#define MPU6050_RA_XG_OFFS_USRL 0x14
#define MPU6050_RA_YG_OFFS_USRH 0x15 //[15:0] YG_OFFS_USR
#define MPU6050_RA_YG_OFFS_USRL 0x16
#define MPU6050_RA_ZG_OFFS_USRH 0x17 //[15:0] ZG_OFFS_USR
#define MPU6050_RA_ZG_OFFS_USRL 0x18
#define MPU6050_RA_SMPLRT_DIV 0x19
#define MPU6050_RA_CONFIG 0x1A
#define MPU6050_RA_GYRO_CONFIG 0x1B
#define MPU6050_RA_ACCEL_CONFIG 0x1C
#define MPU6050_RA_FF_THR 0x1D
#define MPU6050_RA_FF_DUR 0x1E
#define MPU6050_RA_MOT_THR 0x1F
#define MPU6050_RA_MOT_DUR 0x20
#define MPU6050_RA_ZRMOT_THR 0x21
#define MPU6050_RA_ZRMOT_DUR 0x22
#define MPU6050_RA_FIFO_EN 0x23
#define MPU6050_RA_I2C_MST_CTRL 0x24
#define MPU6050_RA_I2C_SLV0_ADDR 0x25
#define MPU6050_RA_I2C_SLV0_REG 0x26
#define MPU6050_RA_I2C_SLV0_CTRL 0x27
#define MPU6050_RA_I2C_SLV1_ADDR 0x28
#define MPU6050_RA_I2C_SLV1_REG 0x29
#define MPU6050_RA_I2C_SLV1_CTRL 0x2A
#define MPU6050_RA_I2C_SLV2_ADDR 0x2B
#define MPU6050_RA_I2C_SLV2_REG 0x2C
#define MPU6050_RA_I2C_SLV2_CTRL 0x2D
#define MPU6050_RA_I2C_SLV3_ADDR 0x2E
#define MPU6050_RA_I2C_SLV3_REG 0x2F
#define MPU6050_RA_I2C_SLV3_CTRL 0x30
#define MPU6050_RA_I2C_SLV4_ADDR 0x31
#define MPU6050_RA_I2C_SLV4_REG 0x32
#define MPU6050_RA_I2C_SLV4_DO 0x33
#define MPU6050_RA_I2C_SLV4_CTRL 0x34
#define MPU6050_RA_I2C_SLV4_DI 0x35
#define MPU6050_RA_I2C_MST_STATUS 0x36
#define MPU6050_RA_INT_PIN_CFG 0x37
#define MPU6050_RA_INT_ENABLE 0x38
#define MPU6050_RA_DMP_INT_STATUS 0x39
#define MPU6050_RA_INT_STATUS 0x3A
#define MPU6050_RA_ACCEL_XOUT_H 0x3B
#define MPU6050_RA_ACCEL_XOUT_L 0x3C
#define MPU6050_RA_ACCEL_YOUT_H 0x3D
#define MPU6050_RA_ACCEL_YOUT_L 0x3E
#define MPU6050_RA_ACCEL_ZOUT_H 0x3F
#define MPU6050_RA_ACCEL_ZOUT_L 0x40
#define MPU6050_RA_TEMP_OUT_H 0x41
#define MPU6050_RA_TEMP_OUT_L 0x42
#define MPU6050_RA_GYRO_XOUT_H 0x43
#define MPU6050_RA_GYRO_XOUT_L 0x44
#define MPU6050_RA_GYRO_YOUT_H 0x45
#define MPU6050_RA_GYRO_YOUT_L 0x46
#define MPU6050_RA_GYRO_ZOUT_H 0x47
#define MPU6050_RA_GYRO_ZOUT_L 0x48
#define MPU6050_RA_EXT_SENS_DATA_00 0x49
#define MPU6050_RA_EXT_SENS_DATA_01 0x4A
#define MPU6050_RA_EXT_SENS_DATA_02 0x4B
#define MPU6050_RA_EXT_SENS_DATA_03 0x4C
#define MPU6050_RA_EXT_SENS_DATA_04 0x4D
#define MPU6050_RA_EXT_SENS_DATA_05 0x4E
#define MPU6050_RA_EXT_SENS_DATA_06 0x4F
#define MPU6050_RA_EXT_SENS_DATA_07 0x50
#define MPU6050_RA_EXT_SENS_DATA_08 0x51
#define MPU6050_RA_EXT_SENS_DATA_09 0x52
#define MPU6050_RA_EXT_SENS_DATA_10 0x53
#define MPU6050_RA_EXT_SENS_DATA_11 0x54
#define MPU6050_RA_EXT_SENS_DATA_12 0x55
#define MPU6050_RA_EXT_SENS_DATA_13 0x56
#define MPU6050_RA_EXT_SENS_DATA_14 0x57
#define MPU6050_RA_EXT_SENS_DATA_15 0x58
#define MPU6050_RA_EXT_SENS_DATA_16 0x59
#define MPU6050_RA_EXT_SENS_DATA_17 0x5A
#define MPU6050_RA_EXT_SENS_DATA_18 0x5B
#define MPU6050_RA_EXT_SENS_DATA_19 0x5C
#define MPU6050_RA_EXT_SENS_DATA_20 0x5D
#define MPU6050_RA_EXT_SENS_DATA_21 0x5E
#define MPU6050_RA_EXT_SENS_DATA_22 0x5F
#define MPU6050_RA_EXT_SENS_DATA_23 0x60
#define MPU6050_RA_MOT_DETECT_STATUS 0x61
#define MPU6050_RA_I2C_SLV0_DO 0x63
#define MPU6050_RA_I2C_SLV1_DO 0x64
#define MPU6050_RA_I2C_SLV2_DO 0x65
#define MPU6050_RA_I2C_SLV3_DO 0x66
#define MPU6050_RA_I2C_MST_DELAY_CTRL 0x67
#define MPU6050_RA_SIGNAL_PATH_RESET 0x68
#define MPU6050_RA_MOT_DETECT_CTRL 0x69
#define MPU6050_RA_USER_CTRL 0x6A
#define MPU6050_RA_PWR_MGMT_1 0x6B
#define MPU6050_RA_PWR_MGMT_2 0x6C
#define MPU6050_RA_BANK_SEL 0x6D
#define MPU6050_RA_MEM_START_ADDR 0x6E
#define MPU6050_RA_MEM_R_W 0x6F
#define MPU6050_RA_DMP_CFG_1 0x70
#define MPU6050_RA_DMP_CFG_2 0x71
#define MPU6050_RA_FIFO_COUNTH 0x72
#define MPU6050_RA_FIFO_COUNTL 0x73
#define MPU6050_RA_FIFO_R_W 0x74
#define MPU6050_RA_WHO_AM_I 0x75
#define MPU6050_TC_PWR_MODE_BIT 7
#define MPU6050_TC_OFFSET_BIT 6
#define MPU6050_TC_OFFSET_LENGTH 6
#define MPU6050_TC_OTP_BNK_VLD_BIT 0
#define MPU6050_VDDIO_LEVEL_VLOGIC 0
#define MPU6050_VDDIO_LEVEL_VDD 1
#define MPU6050_CFG_EXT_SYNC_SET_BIT 5
#define MPU6050_CFG_EXT_SYNC_SET_LENGTH 3
#define MPU6050_CFG_DLPF_CFG_BIT 2
#define MPU6050_CFG_DLPF_CFG_LENGTH 3
#define MPU6050_EXT_SYNC_DISABLED 0x0
#define MPU6050_EXT_SYNC_TEMP_OUT_L 0x1
#define MPU6050_EXT_SYNC_GYRO_XOUT_L 0x2
#define MPU6050_EXT_SYNC_GYRO_YOUT_L 0x3
#define MPU6050_EXT_SYNC_GYRO_ZOUT_L 0x4
#define MPU6050_EXT_SYNC_ACCEL_XOUT_L 0x5
#define MPU6050_EXT_SYNC_ACCEL_YOUT_L 0x6
#define MPU6050_EXT_SYNC_ACCEL_ZOUT_L 0x7
#define MPU6050_DLPF_BW_256 0x00
#define MPU6050_DLPF_BW_188 0x01
#define MPU6050_DLPF_BW_98 0x02
#define MPU6050_DLPF_BW_42 0x03
#define MPU6050_DLPF_BW_20 0x04
#define MPU6050_DLPF_BW_10 0x05
#define MPU6050_DLPF_BW_5 0x06
#define MPU6050_GCONFIG_FS_SEL_BIT 4
#define MPU6050_GCONFIG_FS_SEL_LENGTH 2
#define MPU6050_GYRO_FS_250 0x00
#define MPU6050_GYRO_FS_500 0x01
#define MPU6050_GYRO_FS_1000 0x02
#define MPU6050_GYRO_FS_2000 0x03
#define MPU6050_ACONFIG_XA_ST_BIT 7
#define MPU6050_ACONFIG_YA_ST_BIT 6
#define MPU6050_ACONFIG_ZA_ST_BIT 5
#define MPU6050_ACONFIG_AFS_SEL_BIT 4
#define MPU6050_ACONFIG_AFS_SEL_LENGTH 2
#define MPU6050_ACONFIG_ACCEL_HPF_BIT 2
#define MPU6050_ACONFIG_ACCEL_HPF_LENGTH 3
#define MPU6050_ACCEL_FS_2 0x00
#define MPU6050_ACCEL_FS_4 0x01
#define MPU6050_ACCEL_FS_8 0x02
#define MPU6050_ACCEL_FS_16 0x03
#define MPU6050_DHPF_RESET 0x00
#define MPU6050_DHPF_5 0x01
#define MPU6050_DHPF_2P5 0x02
#define MPU6050_DHPF_1P25 0x03
#define MPU6050_DHPF_0P63 0x04
#define MPU6050_DHPF_HOLD 0x07
#define MPU6050_TEMP_FIFO_EN_BIT 7
#define MPU6050_XG_FIFO_EN_BIT 6
#define MPU6050_YG_FIFO_EN_BIT 5
#define MPU6050_ZG_FIFO_EN_BIT 4
#define MPU6050_ACCEL_FIFO_EN_BIT 3
#define MPU6050_SLV2_FIFO_EN_BIT 2
#define MPU6050_SLV1_FIFO_EN_BIT 1
#define MPU6050_SLV0_FIFO_EN_BIT 0
#define MPU6050_MULT_MST_EN_BIT 7
#define MPU6050_WAIT_FOR_ES_BIT 6
#define MPU6050_SLV_3_FIFO_EN_BIT 5
#define MPU6050_I2C_MST_P_NSR_BIT 4
#define MPU6050_I2C_MST_CLK_BIT 3
#define MPU6050_I2C_MST_CLK_LENGTH 4
#define MPU6050_CLOCK_DIV_348 0x0
#define MPU6050_CLOCK_DIV_333 0x1
#define MPU6050_CLOCK_DIV_320 0x2
#define MPU6050_CLOCK_DIV_308 0x3
#define MPU6050_CLOCK_DIV_296 0x4
#define MPU6050_CLOCK_DIV_286 0x5
#define MPU6050_CLOCK_DIV_276 0x6
#define MPU6050_CLOCK_DIV_267 0x7
#define MPU6050_CLOCK_DIV_258 0x8
#define MPU6050_CLOCK_DIV_500 0x9
#define MPU6050_CLOCK_DIV_471 0xA
#define MPU6050_CLOCK_DIV_444 0xB
#define MPU6050_CLOCK_DIV_421 0xC
#define MPU6050_CLOCK_DIV_400 0xD
#define MPU6050_CLOCK_DIV_381 0xE
#define MPU6050_CLOCK_DIV_364 0xF
#define MPU6050_I2C_SLV_RW_BIT 7
#define MPU6050_I2C_SLV_ADDR_BIT 6
#define MPU6050_I2C_SLV_ADDR_LENGTH 7
#define MPU6050_I2C_SLV_EN_BIT 7
#define MPU6050_I2C_SLV_BYTE_SW_BIT 6
#define MPU6050_I2C_SLV_REG_DIS_BIT 5
#define MPU6050_I2C_SLV_GRP_BIT 4
#define MPU6050_I2C_SLV_LEN_BIT 3
#define MPU6050_I2C_SLV_LEN_LENGTH 4
#define MPU6050_I2C_SLV4_RW_BIT 7
#define MPU6050_I2C_SLV4_ADDR_BIT 6
#define MPU6050_I2C_SLV4_ADDR_LENGTH 7
#define MPU6050_I2C_SLV4_EN_BIT 7
#define MPU6050_I2C_SLV4_INT_EN_BIT 6
#define MPU6050_I2C_SLV4_REG_DIS_BIT 5
#define MPU6050_I2C_SLV4_MST_DLY_BIT 4
#define MPU6050_I2C_SLV4_MST_DLY_LENGTH 5
#define MPU6050_MST_PASS_THROUGH_BIT 7
#define MPU6050_MST_I2C_SLV4_DONE_BIT 6
#define MPU6050_MST_I2C_LOST_ARB_BIT 5
#define MPU6050_MST_I2C_SLV4_NACK_BIT 4
#define MPU6050_MST_I2C_SLV3_NACK_BIT 3
#define MPU6050_MST_I2C_SLV2_NACK_BIT 2
#define MPU6050_MST_I2C_SLV1_NACK_BIT 1
#define MPU6050_MST_I2C_SLV0_NACK_BIT 0
#define MPU6050_INTCFG_INT_LEVEL_BIT 7
#define MPU6050_INTCFG_INT_OPEN_BIT 6
#define MPU6050_INTCFG_LATCH_INT_EN_BIT 5
#define MPU6050_INTCFG_INT_RD_CLEAR_BIT 4
#define MPU6050_INTCFG_FSYNC_INT_LEVEL_BIT 3
#define MPU6050_INTCFG_FSYNC_INT_EN_BIT 2
#define MPU6050_INTCFG_I2C_BYPASS_EN_BIT 1
#define MPU6050_INTCFG_CLKOUT_EN_BIT 0
#define MPU6050_INTMODE_ACTIVEHIGH 0x00
#define MPU6050_INTMODE_ACTIVELOW 0x01
#define MPU6050_INTDRV_PUSHPULL 0x00
#define MPU6050_INTDRV_OPENDRAIN 0x01
#define MPU6050_INTLATCH_50USPULSE 0x00
#define MPU6050_INTLATCH_WAITCLEAR 0x01
#define MPU6050_INTCLEAR_STATUSREAD 0x00
#define MPU6050_INTCLEAR_ANYREAD 0x01
#define MPU6050_INTERRUPT_FF_BIT 7
#define MPU6050_INTERRUPT_MOT_BIT 6
#define MPU6050_INTERRUPT_ZMOT_BIT 5
#define MPU6050_INTERRUPT_FIFO_OFLOW_BIT 4
#define MPU6050_INTERRUPT_I2C_MST_INT_BIT 3
#define MPU6050_INTERRUPT_PLL_RDY_INT_BIT 2
#define MPU6050_INTERRUPT_DMP_INT_BIT 1
#define MPU6050_INTERRUPT_DATA_RDY_BIT 0
// TODO: figure out what these actually do
// UMPL source code is not very obivous
#define MPU6050_DMPINT_5_BIT 5
#define MPU6050_DMPINT_4_BIT 4
#define MPU6050_DMPINT_3_BIT 3
#define MPU6050_DMPINT_2_BIT 2
#define MPU6050_DMPINT_1_BIT 1
#define MPU6050_DMPINT_0_BIT 0
#define MPU6050_MOTION_MOT_XNEG_BIT 7
#define MPU6050_MOTION_MOT_XPOS_BIT 6
#define MPU6050_MOTION_MOT_YNEG_BIT 5
#define MPU6050_MOTION_MOT_YPOS_BIT 4
#define MPU6050_MOTION_MOT_ZNEG_BIT 3
#define MPU6050_MOTION_MOT_ZPOS_BIT 2
#define MPU6050_MOTION_MOT_ZRMOT_BIT 0
#define MPU6050_DELAYCTRL_DELAY_ES_SHADOW_BIT 7
#define MPU6050_DELAYCTRL_I2C_SLV4_DLY_EN_BIT 4
#define MPU6050_DELAYCTRL_I2C_SLV3_DLY_EN_BIT 3
#define MPU6050_DELAYCTRL_I2C_SLV2_DLY_EN_BIT 2
#define MPU6050_DELAYCTRL_I2C_SLV1_DLY_EN_BIT 1
#define MPU6050_DELAYCTRL_I2C_SLV0_DLY_EN_BIT 0
#define MPU6050_PATHRESET_GYRO_RESET_BIT 2
#define MPU6050_PATHRESET_ACCEL_RESET_BIT 1
#define MPU6050_PATHRESET_TEMP_RESET_BIT 0
#define MPU6050_DETECT_ACCEL_ON_DELAY_BIT 5
#define MPU6050_DETECT_ACCEL_ON_DELAY_LENGTH 2
#define MPU6050_DETECT_FF_COUNT_BIT 3
#define MPU6050_DETECT_FF_COUNT_LENGTH 2
#define MPU6050_DETECT_MOT_COUNT_BIT 1
#define MPU6050_DETECT_MOT_COUNT_LENGTH 2
#define MPU6050_DETECT_DECREMENT_RESET 0x0
#define MPU6050_DETECT_DECREMENT_1 0x1
#define MPU6050_DETECT_DECREMENT_2 0x2
#define MPU6050_DETECT_DECREMENT_4 0x3
#define MPU6050_USERCTRL_DMP_EN_BIT 7
#define MPU6050_USERCTRL_FIFO_EN_BIT 6
#define MPU6050_USERCTRL_I2C_MST_EN_BIT 5
#define MPU6050_USERCTRL_I2C_IF_DIS_BIT 4
#define MPU6050_USERCTRL_DMP_RESET_BIT 3
#define MPU6050_USERCTRL_FIFO_RESET_BIT 2
#define MPU6050_USERCTRL_I2C_MST_RESET_BIT 1
#define MPU6050_USERCTRL_SIG_COND_RESET_BIT 0
#define MPU6050_PWR1_DEVICE_RESET_BIT 7
#define MPU6050_PWR1_SLEEP_BIT 6
#define MPU6050_PWR1_CYCLE_BIT 5
#define MPU6050_PWR1_TEMP_DIS_BIT 3
#define MPU6050_PWR1_CLKSEL_BIT 2
#define MPU6050_PWR1_CLKSEL_LENGTH 3
#define MPU6050_CLOCK_INTERNAL 0x00
#define MPU6050_CLOCK_PLL_XGYRO 0x01
#define MPU6050_CLOCK_PLL_YGYRO 0x02
#define MPU6050_CLOCK_PLL_ZGYRO 0x03
#define MPU6050_CLOCK_PLL_EXT32K 0x04
#define MPU6050_CLOCK_PLL_EXT19M 0x05
#define MPU6050_CLOCK_KEEP_RESET 0x07
#define MPU6050_PWR2_LP_WAKE_CTRL_BIT 7
#define MPU6050_PWR2_LP_WAKE_CTRL_LENGTH 2
#define MPU6050_PWR2_STBY_XA_BIT 5
#define MPU6050_PWR2_STBY_YA_BIT 4
#define MPU6050_PWR2_STBY_ZA_BIT 3
#define MPU6050_PWR2_STBY_XG_BIT 2
#define MPU6050_PWR2_STBY_YG_BIT 1
#define MPU6050_PWR2_STBY_ZG_BIT 0
#define MPU6050_WAKE_FREQ_1P25 0x0
#define MPU6050_WAKE_FREQ_2P5 0x1
#define MPU6050_WAKE_FREQ_5 0x2
#define MPU6050_WAKE_FREQ_10 0x3
#define MPU6050_BANKSEL_PRFTCH_EN_BIT 6
#define MPU6050_BANKSEL_CFG_USER_BANK_BIT 5
#define MPU6050_BANKSEL_MEM_SEL_BIT 4
#define MPU6050_BANKSEL_MEM_SEL_LENGTH 5
#define MPU6050_WHO_AM_I_BIT 6
#define MPU6050_WHO_AM_I_LENGTH 6
#define MPU6050_DMP_MEMORY_BANKS 8
#define MPU6050_DMP_MEMORY_BANK_SIZE 256
#define MPU6050_DMP_MEMORY_CHUNK_SIZE 16
// note: DMP code memory blocks defined at end of header file
class MPU6050 {
public:
MPU6050();
MPU6050(uint8_t address);
void initialize();
bool testConnection();
// AUX_VDDIO register
uint8_t getAuxVDDIOLevel();
void setAuxVDDIOLevel(uint8_t level);
// SMPLRT_DIV register
uint8_t getRate();
void setRate(uint8_t rate);
// CONFIG register
uint8_t getExternalFrameSync();
void setExternalFrameSync(uint8_t sync);
uint8_t getDLPFMode();
void setDLPFMode(uint8_t bandwidth);
// GYRO_CONFIG register
uint8_t getFullScaleGyroRange();
void setFullScaleGyroRange(uint8_t range);
// ACCEL_CONFIG register
bool getAccelXSelfTest();
void setAccelXSelfTest(bool enabled);
bool getAccelYSelfTest();
void setAccelYSelfTest(bool enabled);
bool getAccelZSelfTest();
void setAccelZSelfTest(bool enabled);
uint8_t getFullScaleAccelRange();
void setFullScaleAccelRange(uint8_t range);
uint8_t getDHPFMode();
void setDHPFMode(uint8_t mode);
// FF_THR register
uint8_t getFreefallDetectionThreshold();
void setFreefallDetectionThreshold(uint8_t threshold);
// FF_DUR register
uint8_t getFreefallDetectionDuration();
void setFreefallDetectionDuration(uint8_t duration);
// MOT_THR register
uint8_t getMotionDetectionThreshold();
void setMotionDetectionThreshold(uint8_t threshold);
// MOT_DUR register
uint8_t getMotionDetectionDuration();
void setMotionDetectionDuration(uint8_t duration);
// ZRMOT_THR register
uint8_t getZeroMotionDetectionThreshold();
void setZeroMotionDetectionThreshold(uint8_t threshold);
// ZRMOT_DUR register
uint8_t getZeroMotionDetectionDuration();
void setZeroMotionDetectionDuration(uint8_t duration);
// FIFO_EN register
bool getTempFIFOEnabled();
void setTempFIFOEnabled(bool enabled);
bool getXGyroFIFOEnabled();
void setXGyroFIFOEnabled(bool enabled);
bool getYGyroFIFOEnabled();
void setYGyroFIFOEnabled(bool enabled);
bool getZGyroFIFOEnabled();
void setZGyroFIFOEnabled(bool enabled);
bool getAccelFIFOEnabled();
void setAccelFIFOEnabled(bool enabled);
bool getSlave2FIFOEnabled();
void setSlave2FIFOEnabled(bool enabled);
bool getSlave1FIFOEnabled();
void setSlave1FIFOEnabled(bool enabled);
bool getSlave0FIFOEnabled();
void setSlave0FIFOEnabled(bool enabled);
// I2C_MST_CTRL register
bool getMultiMasterEnabled();
void setMultiMasterEnabled(bool enabled);
bool getWaitForExternalSensorEnabled();
void setWaitForExternalSensorEnabled(bool enabled);
bool getSlave3FIFOEnabled();
void setSlave3FIFOEnabled(bool enabled);
bool getSlaveReadWriteTransitionEnabled();
void setSlaveReadWriteTransitionEnabled(bool enabled);
uint8_t getMasterClockSpeed();
void setMasterClockSpeed(uint8_t speed);
// I2C_SLV* registers (Slave 0-3)
uint8_t getSlaveAddress(uint8_t num);
void setSlaveAddress(uint8_t num, uint8_t address);
uint8_t getSlaveRegister(uint8_t num);
void setSlaveRegister(uint8_t num, uint8_t reg);
bool getSlaveEnabled(uint8_t num);
void setSlaveEnabled(uint8_t num, bool enabled);
bool getSlaveWordByteSwap(uint8_t num);
void setSlaveWordByteSwap(uint8_t num, bool enabled);
bool getSlaveWriteMode(uint8_t num);
void setSlaveWriteMode(uint8_t num, bool mode);
bool getSlaveWordGroupOffset(uint8_t num);
void setSlaveWordGroupOffset(uint8_t num, bool enabled);
uint8_t getSlaveDataLength(uint8_t num);
void setSlaveDataLength(uint8_t num, uint8_t length);
// I2C_SLV* registers (Slave 4)
uint8_t getSlave4Address();
void setSlave4Address(uint8_t address);
uint8_t getSlave4Register();
void setSlave4Register(uint8_t reg);
void setSlave4OutputByte(uint8_t data);
bool getSlave4Enabled();
void setSlave4Enabled(bool enabled);
bool getSlave4InterruptEnabled();
void setSlave4InterruptEnabled(bool enabled);
bool getSlave4WriteMode();
void setSlave4WriteMode(bool mode);
uint8_t getSlave4MasterDelay();
void setSlave4MasterDelay(uint8_t delay);
uint8_t getSlate4InputByte();
// I2C_MST_STATUS register
bool getPassthroughStatus();
bool getSlave4IsDone();
bool getLostArbitration();
bool getSlave4Nack();
bool getSlave3Nack();
bool getSlave2Nack();
bool getSlave1Nack();
bool getSlave0Nack();
// INT_PIN_CFG register
bool getInterruptMode();
void setInterruptMode(bool mode);
bool getInterruptDrive();
void setInterruptDrive(bool drive);
bool getInterruptLatch();
void setInterruptLatch(bool latch);
bool getInterruptLatchClear();
void setInterruptLatchClear(bool clear);
bool getFSyncInterruptLevel();
void setFSyncInterruptLevel(bool level);
bool getFSyncInterruptEnabled();
void setFSyncInterruptEnabled(bool enabled);
bool getI2CBypassEnabled();
void setI2CBypassEnabled(bool enabled);
bool getClockOutputEnabled();
void setClockOutputEnabled(bool enabled);
// INT_ENABLE register
uint8_t getIntEnabled();
void setIntEnabled(uint8_t enabled);
bool getIntFreefallEnabled();
void setIntFreefallEnabled(bool enabled);
bool getIntMotionEnabled();
void setIntMotionEnabled(bool enabled);
bool getIntZeroMotionEnabled();
void setIntZeroMotionEnabled(bool enabled);
bool getIntFIFOBufferOverflowEnabled();
void setIntFIFOBufferOverflowEnabled(bool enabled);
bool getIntI2CMasterEnabled();
void setIntI2CMasterEnabled(bool enabled);
bool getIntDataReadyEnabled();
void setIntDataReadyEnabled(bool enabled);
// INT_STATUS register
uint8_t getIntStatus();
bool getIntFreefallStatus();
bool getIntMotionStatus();
bool getIntZeroMotionStatus();
bool getIntFIFOBufferOverflowStatus();
bool getIntI2CMasterStatus();
bool getIntDataReadyStatus();
// ACCEL_*OUT_* registers
void getMotion9(int16_t* ax, int16_t* ay, int16_t* az, int16_t* gx, int16_t* gy, int16_t* gz, int16_t* mx, int16_t* my, int16_t* mz);
void getMotion6(int16_t* ax, int16_t* ay, int16_t* az, int16_t* gx, int16_t* gy, int16_t* gz);
void getAcceleration(int16_t* x, int16_t* y, int16_t* z);
int16_t getAccelerationX();
int16_t getAccelerationY();
int16_t getAccelerationZ();
// TEMP_OUT_* registers
int16_t getTemperature();
// GYRO_*OUT_* registers
void getRotation(int16_t* x, int16_t* y, int16_t* z);
int16_t getRotationX();
int16_t getRotationY();
int16_t getRotationZ();
// EXT_SENS_DATA_* registers
uint8_t getExternalSensorByte(int position);
uint16_t getExternalSensorWord(int position);
uint32_t getExternalSensorDWord(int position);
// MOT_DETECT_STATUS register
bool getXNegMotionDetected();
bool getXPosMotionDetected();
bool getYNegMotionDetected();
bool getYPosMotionDetected();
bool getZNegMotionDetected();
bool getZPosMotionDetected();
bool getZeroMotionDetected();
// I2C_SLV*_DO register
void setSlaveOutputByte(uint8_t num, uint8_t data);
// I2C_MST_DELAY_CTRL register
bool getExternalShadowDelayEnabled();
void setExternalShadowDelayEnabled(bool enabled);
bool getSlaveDelayEnabled(uint8_t num);
void setSlaveDelayEnabled(uint8_t num, bool enabled);
// SIGNAL_PATH_RESET register
void resetGyroscopePath();
void resetAccelerometerPath();
void resetTemperaturePath();
// MOT_DETECT_CTRL register
uint8_t getAccelerometerPowerOnDelay();
void setAccelerometerPowerOnDelay(uint8_t delay);
uint8_t getFreefallDetectionCounterDecrement();
void setFreefallDetectionCounterDecrement(uint8_t decrement);
uint8_t getMotionDetectionCounterDecrement();
void setMotionDetectionCounterDecrement(uint8_t decrement);
// USER_CTRL register
bool getFIFOEnabled();
void setFIFOEnabled(bool enabled);
bool getI2CMasterModeEnabled();
void setI2CMasterModeEnabled(bool enabled);
void switchSPIEnabled(bool enabled);
void resetFIFO();
void resetI2CMaster();
void resetSensors();
// PWR_MGMT_1 register
void reset();
bool getSleepEnabled();
void setSleepEnabled(bool enabled);
bool getWakeCycleEnabled();
void setWakeCycleEnabled(bool enabled);
bool getTempSensorEnabled();
void setTempSensorEnabled(bool enabled);
uint8_t getClockSource();
void setClockSource(uint8_t source);
// PWR_MGMT_2 register
uint8_t getWakeFrequency();
void setWakeFrequency(uint8_t frequency);
bool getStandbyXAccelEnabled();
void setStandbyXAccelEnabled(bool enabled);
bool getStandbyYAccelEnabled();
void setStandbyYAccelEnabled(bool enabled);
bool getStandbyZAccelEnabled();
void setStandbyZAccelEnabled(bool enabled);
bool getStandbyXGyroEnabled();
void setStandbyXGyroEnabled(bool enabled);
bool getStandbyYGyroEnabled();
void setStandbyYGyroEnabled(bool enabled);
bool getStandbyZGyroEnabled();
void setStandbyZGyroEnabled(bool enabled);
// FIFO_COUNT_* registers
uint16_t getFIFOCount();
// FIFO_R_W register
uint8_t getFIFOByte();
void setFIFOByte(uint8_t data);
void getFIFOBytes(uint8_t *data, uint8_t length);
// WHO_AM_I register
uint8_t getDeviceID();
void setDeviceID(uint8_t id);
// ======== UNDOCUMENTED/DMP REGISTERS/METHODS ========
// XG_OFFS_TC register
uint8_t getOTPBankValid();
void setOTPBankValid(bool enabled);
int8_t getXGyroOffsetTC();
void setXGyroOffsetTC(int8_t offset);
// YG_OFFS_TC register
int8_t getYGyroOffsetTC();
void setYGyroOffsetTC(int8_t offset);
// ZG_OFFS_TC register
int8_t getZGyroOffsetTC();
void setZGyroOffsetTC(int8_t offset);
// X_FINE_GAIN register
int8_t getXFineGain();
void setXFineGain(int8_t gain);
// Y_FINE_GAIN register
int8_t getYFineGain();
void setYFineGain(int8_t gain);
// Z_FINE_GAIN register
int8_t getZFineGain();
void setZFineGain(int8_t gain);
// XA_OFFS_* registers
int16_t getXAccelOffset();
void setXAccelOffset(int16_t offset);
// YA_OFFS_* register
int16_t getYAccelOffset();
void setYAccelOffset(int16_t offset);
// ZA_OFFS_* register
int16_t getZAccelOffset();
void setZAccelOffset(int16_t offset);
// XG_OFFS_USR* registers
int16_t getXGyroOffset();
void setXGyroOffset(int16_t offset);
// YG_OFFS_USR* register
int16_t getYGyroOffset();
void setYGyroOffset(int16_t offset);
// ZG_OFFS_USR* register
int16_t getZGyroOffset();
void setZGyroOffset(int16_t offset);
// INT_ENABLE register (DMP functions)
bool getIntPLLReadyEnabled();
void setIntPLLReadyEnabled(bool enabled);
bool getIntDMPEnabled();
void setIntDMPEnabled(bool enabled);
// DMP_INT_STATUS
bool getDMPInt5Status();
bool getDMPInt4Status();
bool getDMPInt3Status();
bool getDMPInt2Status();
bool getDMPInt1Status();
bool getDMPInt0Status();
// INT_STATUS register (DMP functions)
bool getIntPLLReadyStatus();
bool getIntDMPStatus();
// USER_CTRL register (DMP functions)
bool getDMPEnabled();
void setDMPEnabled(bool enabled);
void resetDMP();
// BANK_SEL register
void setMemoryBank(uint8_t bank, bool prefetchEnabled=false, bool userBank=false);
// MEM_START_ADDR register
void setMemoryStartAddress(uint8_t address);
// MEM_R_W register
uint8_t readMemoryByte();
void writeMemoryByte(uint8_t data);
void readMemoryBlock(uint8_t *data, uint16_t dataSize, uint8_t bank=0, uint8_t address=0);
bool writeMemoryBlock(const uint8_t *data, uint16_t dataSize, uint8_t bank=0, uint8_t address=0, bool verify=true, bool useProgMem=false);
bool writeProgMemoryBlock(const uint8_t *data, uint16_t dataSize, uint8_t bank=0, uint8_t address=0, bool verify=true);
bool writeDMPConfigurationSet(const uint8_t *data, uint16_t dataSize, bool useProgMem=false);
bool writeProgDMPConfigurationSet(const uint8_t *data, uint16_t dataSize);
// DMP_CFG_1 register
uint8_t getDMPConfig1();
void setDMPConfig1(uint8_t config);
// DMP_CFG_2 register
uint8_t getDMPConfig2();
void setDMPConfig2(uint8_t config);
// special methods for MotionApps 2.0 implementation
#ifdef MPU6050_INCLUDE_DMP_MOTIONAPPS20
uint8_t *dmpPacketBuffer;
uint16_t dmpPacketSize;
uint8_t dmpInitialize();
bool dmpPacketAvailable();
uint8_t dmpSetFIFORate(uint8_t fifoRate);
uint8_t dmpGetFIFORate();
uint8_t dmpGetSampleStepSizeMS();
uint8_t dmpGetSampleFrequency();
int32_t dmpDecodeTemperature(int8_t tempReg);
// Register callbacks after a packet of FIFO data is processed
//uint8_t dmpRegisterFIFORateProcess(inv_obj_func func, int16_t priority);
//uint8_t dmpUnregisterFIFORateProcess(inv_obj_func func);
uint8_t dmpRunFIFORateProcesses();
// Setup FIFO for various output
uint8_t dmpSendQuaternion(uint_fast16_t accuracy);
uint8_t dmpSendGyro(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendAccel(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendLinearAccel(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendLinearAccelInWorld(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendControlData(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendSensorData(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendExternalSensorData(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendGravity(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendPacketNumber(uint_fast16_t accuracy);
uint8_t dmpSendQuantizedAccel(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendEIS(uint_fast16_t elements, uint_fast16_t accuracy);
// Get Fixed Point data from FIFO
uint8_t dmpGetAccel(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetAccel(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetAccel(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetQuaternion(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetQuaternion(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetQuaternion(Quaternion *q, const uint8_t* packet=0);
uint8_t dmpGet6AxisQuaternion(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGet6AxisQuaternion(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGet6AxisQuaternion(Quaternion *q, const uint8_t* packet=0);
uint8_t dmpGetRelativeQuaternion(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetRelativeQuaternion(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetRelativeQuaternion(Quaternion *data, const uint8_t* packet=0);
uint8_t dmpGetGyro(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyro(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyro(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpSetLinearAccelFilterCoefficient(float coef);
uint8_t dmpGetLinearAccel(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetLinearAccel(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetLinearAccel(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetLinearAccel(VectorInt16 *v, VectorInt16 *vRaw, VectorFloat *gravity);
uint8_t dmpGetLinearAccelInWorld(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetLinearAccelInWorld(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetLinearAccelInWorld(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetLinearAccelInWorld(VectorInt16 *v, VectorInt16 *vReal, Quaternion *q);
uint8_t dmpGetGyroAndAccelSensor(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyroAndAccelSensor(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyroAndAccelSensor(VectorInt16 *g, VectorInt16 *a, const uint8_t* packet=0);
uint8_t dmpGetGyroSensor(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyroSensor(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyroSensor(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetControlData(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetTemperature(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGravity(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGravity(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetGravity(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetGravity(VectorFloat *v, Quaternion *q);
uint8_t dmpGetUnquantizedAccel(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetUnquantizedAccel(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetUnquantizedAccel(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetQuantizedAccel(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetQuantizedAccel(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetQuantizedAccel(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetExternalSensorData(int32_t *data, uint16_t size, const uint8_t* packet=0);
uint8_t dmpGetEIS(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetEuler(float *data, Quaternion *q);
uint8_t dmpGetYawPitchRoll(float *data, Quaternion *q, VectorFloat *gravity);
// Get Floating Point data from FIFO
uint8_t dmpGetAccelFloat(float *data, const uint8_t* packet=0);
uint8_t dmpGetQuaternionFloat(float *data, const uint8_t* packet=0);
uint8_t dmpProcessFIFOPacket(const unsigned char *dmpData);
uint8_t dmpReadAndProcessFIFOPacket(uint8_t numPackets, uint8_t *processed=NULL);
uint8_t dmpSetFIFOProcessedCallback(void (*func) (void));
uint8_t dmpInitFIFOParam();
uint8_t dmpCloseFIFO();
uint8_t dmpSetGyroDataSource(uint8_t source);
uint8_t dmpDecodeQuantizedAccel();
uint32_t dmpGetGyroSumOfSquare();
uint32_t dmpGetAccelSumOfSquare();
void dmpOverrideQuaternion(long *q);
uint16_t dmpGetFIFOPacketSize();
#endif
// special methods for MotionApps 4.1 implementation
#ifdef MPU6050_INCLUDE_DMP_MOTIONAPPS41
uint8_t *dmpPacketBuffer;
uint16_t dmpPacketSize;
uint8_t dmpInitialize();
bool dmpPacketAvailable();
uint8_t dmpSetFIFORate(uint8_t fifoRate);
uint8_t dmpGetFIFORate();
uint8_t dmpGetSampleStepSizeMS();
uint8_t dmpGetSampleFrequency();
int32_t dmpDecodeTemperature(int8_t tempReg);
// Register callbacks after a packet of FIFO data is processed
//uint8_t dmpRegisterFIFORateProcess(inv_obj_func func, int16_t priority);
//uint8_t dmpUnregisterFIFORateProcess(inv_obj_func func);
uint8_t dmpRunFIFORateProcesses();
// Setup FIFO for various output
uint8_t dmpSendQuaternion(uint_fast16_t accuracy);
uint8_t dmpSendGyro(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendAccel(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendLinearAccel(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendLinearAccelInWorld(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendControlData(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendSensorData(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendExternalSensorData(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendGravity(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendPacketNumber(uint_fast16_t accuracy);
uint8_t dmpSendQuantizedAccel(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t dmpSendEIS(uint_fast16_t elements, uint_fast16_t accuracy);
// Get Fixed Point data from FIFO
uint8_t dmpGetAccel(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetAccel(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetAccel(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetQuaternion(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetQuaternion(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetQuaternion(Quaternion *q, const uint8_t* packet=0);
uint8_t dmpGet6AxisQuaternion(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGet6AxisQuaternion(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGet6AxisQuaternion(Quaternion *q, const uint8_t* packet=0);
uint8_t dmpGetRelativeQuaternion(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetRelativeQuaternion(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetRelativeQuaternion(Quaternion *data, const uint8_t* packet=0);
uint8_t dmpGetGyro(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyro(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyro(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetMag(int16_t *data, const uint8_t* packet=0);
uint8_t dmpSetLinearAccelFilterCoefficient(float coef);
uint8_t dmpGetLinearAccel(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetLinearAccel(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetLinearAccel(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetLinearAccel(VectorInt16 *v, VectorInt16 *vRaw, VectorFloat *gravity);
uint8_t dmpGetLinearAccelInWorld(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetLinearAccelInWorld(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetLinearAccelInWorld(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetLinearAccelInWorld(VectorInt16 *v, VectorInt16 *vReal, Quaternion *q);
uint8_t dmpGetGyroAndAccelSensor(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyroAndAccelSensor(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyroAndAccelSensor(VectorInt16 *g, VectorInt16 *a, const uint8_t* packet=0);
uint8_t dmpGetGyroSensor(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyroSensor(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetGyroSensor(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetControlData(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetTemperature(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGravity(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetGravity(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetGravity(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetGravity(VectorFloat *v, Quaternion *q);
uint8_t dmpGetUnquantizedAccel(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetUnquantizedAccel(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetUnquantizedAccel(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetQuantizedAccel(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetQuantizedAccel(int16_t *data, const uint8_t* packet=0);
uint8_t dmpGetQuantizedAccel(VectorInt16 *v, const uint8_t* packet=0);
uint8_t dmpGetExternalSensorData(int32_t *data, uint16_t size, const uint8_t* packet=0);
uint8_t dmpGetEIS(int32_t *data, const uint8_t* packet=0);
uint8_t dmpGetEuler(float *data, Quaternion *q);
uint8_t dmpGetYawPitchRoll(float *data, Quaternion *q, VectorFloat *gravity);
// Get Floating Point data from FIFO
uint8_t dmpGetAccelFloat(float *data, const uint8_t* packet=0);
uint8_t dmpGetQuaternionFloat(float *data, const uint8_t* packet=0);
uint8_t dmpProcessFIFOPacket(const unsigned char *dmpData);
uint8_t dmpReadAndProcessFIFOPacket(uint8_t numPackets, uint8_t *processed=NULL);
uint8_t dmpSetFIFOProcessedCallback(void (*func) (void));
uint8_t dmpInitFIFOParam();
uint8_t dmpCloseFIFO();
uint8_t dmpSetGyroDataSource(uint8_t source);
uint8_t dmpDecodeQuantizedAccel();
uint32_t dmpGetGyroSumOfSquare();
uint32_t dmpGetAccelSumOfSquare();
void dmpOverrideQuaternion(long *q);
uint16_t dmpGetFIFOPacketSize();
#endif
private:
uint8_t devAddr;
uint8_t buffer[14];
};
#endif /* _MPU6050_H_ */
// I2Cdev library collection - MPU6050 I2C device class, 6-axis MotionApps 2.0 implementation
// Based on InvenSense MPU-6050 register map document rev. 2.0, 5/19/2011 (RM-MPU-6000A-00)
// 5/20/2013 by Jeff Rowberg <jeff@rowberg.net>
// Updates should (hopefully) always be available at https://github.com/jrowberg/i2cdevlib
//
// Changelog:
// ... - ongoing debug release
/* ============================================
I2Cdev device library code is placed under the MIT license
Copyright (c) 2012 Jeff Rowberg
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
THE SOFTWARE.
===============================================
*/
#ifndef _MPU6050_6AXIS_MOTIONAPPS20_H_
#define _MPU6050_6AXIS_MOTIONAPPS20_H_
#include "I2Cdev.h"
#include "helper_3dmath.h"
// MotionApps 2.0 DMP implementation, built using the MPU-6050EVB evaluation board
#define MPU6050_INCLUDE_DMP_MOTIONAPPS20
#include "MPU6050.h"
// Tom Carpenter's conditional PROGMEM code
// http://forum.arduino.cc/index.php?topic=129407.0
#ifndef __arm__
#include <avr/pgmspace.h>
#else
// Teensy 3.0 library conditional PROGMEM code from Paul Stoffregen
#ifndef __PGMSPACE_H_
#define __PGMSPACE_H_ 1
#include <inttypes.h>
#define PROGMEM
#define PGM_P const char *
#define PSTR(str) (str)
#define F(x) x
typedef void prog_void;
typedef char prog_char;
typedef unsigned char prog_uchar;
typedef int8_t prog_int8_t;
typedef uint8_t prog_uint8_t;
typedef int16_t prog_int16_t;
typedef uint16_t prog_uint16_t;
typedef int32_t prog_int32_t;
typedef uint32_t prog_uint32_t;
#define strcpy_P(dest, src) strcpy((dest), (src))
#define strcat_P(dest, src) strcat((dest), (src))
#define strcmp_P(a, b) strcmp((a), (b))
#define pgm_read_byte(addr) (*(const unsigned char *)(addr))
#define pgm_read_word(addr) (*(const unsigned short *)(addr))
#define pgm_read_dword(addr) (*(const unsigned long *)(addr))
#define pgm_read_float(addr) (*(const float *)(addr))
#define pgm_read_byte_near(addr) pgm_read_byte(addr)
#define pgm_read_word_near(addr) pgm_read_word(addr)
#define pgm_read_dword_near(addr) pgm_read_dword(addr)
#define pgm_read_float_near(addr) pgm_read_float(addr)
#define pgm_read_byte_far(addr) pgm_read_byte(addr)
#define pgm_read_word_far(addr) pgm_read_word(addr)
#define pgm_read_dword_far(addr) pgm_read_dword(addr)
#define pgm_read_float_far(addr) pgm_read_float(addr)
#endif
#endif
/* Source is from the InvenSense MotionApps v2 demo code. Original source is
* unavailable, unless you happen to be amazing as decompiling binary by
* hand (in which case, please contact me, and I'm totally serious).
*
* Also, I'd like to offer many, many thanks to Noah Zerkin for all of the
* DMP reverse-engineering he did to help make this bit of wizardry
* possible.
*/
// NOTE! Enabling DEBUG adds about 3.3kB to the flash program size.
// Debug output is now working even on ATMega328P MCUs (e.g. Arduino Uno)
// after moving string constants to flash memory storage using the F()
// compiler macro (Arduino IDE 1.0+ required).
//#define DEBUG
#ifdef DEBUG
#define DEBUG_PRINT(x) Serial.print(x)
#define DEBUG_PRINTF(x, y) Serial.print(x, y)
#define DEBUG_PRINTLN(x) Serial.println(x)
#define DEBUG_PRINTLNF(x, y) Serial.println(x, y)
#else
#define DEBUG_PRINT(x)
#define DEBUG_PRINTF(x, y)
#define DEBUG_PRINTLN(x)
#define DEBUG_PRINTLNF(x, y)
#endif
#define MPU6050_DMP_CODE_SIZE 1929 // dmpMemory[]
#define MPU6050_DMP_CONFIG_SIZE 192 // dmpConfig[]
#define MPU6050_DMP_UPDATES_SIZE 47 // dmpUpdates[]
/* ================================================================================================ *
| Default MotionApps v2.0 42-byte FIFO packet structure: |
| |
| [QUAT W][ ][QUAT X][ ][QUAT Y][ ][QUAT Z][ ][GYRO X][ ][GYRO Y][ ] |
| 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 |
| |
| [GYRO Z][ ][ACC X ][ ][ACC Y ][ ][ACC Z ][ ][ ] |
| 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 |
* ================================================================================================ */
// this block of memory gets written to the MPU on start-up, and it seems
// to be volatile memory, so it has to be done each time (it only takes ~1
// second though)
const unsigned char dmpMemory[MPU6050_DMP_CODE_SIZE] PROGMEM = {
// bank 0, 256 bytes
0xFB, 0x00, 0x00, 0x3E, 0x00, 0x0B, 0x00, 0x36, 0x00, 0x01, 0x00, 0x02, 0x00, 0x03, 0x00, 0x00,
0x00, 0x65, 0x00, 0x54, 0xFF, 0xEF, 0x00, 0x00, 0xFA, 0x80, 0x00, 0x0B, 0x12, 0x82, 0x00, 0x01,
0x00, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x28, 0x00, 0x00, 0xFF, 0xFF, 0x45, 0x81, 0xFF, 0xFF, 0xFA, 0x72, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x03, 0xE8, 0x00, 0x00, 0x00, 0x01, 0x00, 0x01, 0x7F, 0xFF, 0xFF, 0xFE, 0x80, 0x01,
0x00, 0x1B, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x3E, 0x03, 0x30, 0x40, 0x00, 0x00, 0x00, 0x02, 0xCA, 0xE3, 0x09, 0x3E, 0x80, 0x00, 0x00,
0x20, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x60, 0x00, 0x00, 0x00,
0x41, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x0B, 0x2A, 0x00, 0x00, 0x16, 0x55, 0x00, 0x00, 0x21, 0x82,
0xFD, 0x87, 0x26, 0x50, 0xFD, 0x80, 0x00, 0x00, 0x00, 0x1F, 0x00, 0x00, 0x00, 0x05, 0x80, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x02, 0x00, 0x00, 0x00, 0x03, 0x00, 0x00,
0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x04, 0x6F, 0x00, 0x02, 0x65, 0x32, 0x00, 0x00, 0x5E, 0xC0,
0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0xFB, 0x8C, 0x6F, 0x5D, 0xFD, 0x5D, 0x08, 0xD9, 0x00, 0x7C, 0x73, 0x3B, 0x00, 0x6C, 0x12, 0xCC,
0x32, 0x00, 0x13, 0x9D, 0x32, 0x00, 0xD0, 0xD6, 0x32, 0x00, 0x08, 0x00, 0x40, 0x00, 0x01, 0xF4,
0xFF, 0xE6, 0x80, 0x79, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0xD0, 0xD6, 0x00, 0x00, 0x27, 0x10,
// bank 1, 256 bytes
0xFB, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x01, 0x00, 0x00, 0x00,
0x00, 0x00, 0xFA, 0x36, 0xFF, 0xBC, 0x30, 0x8E, 0x00, 0x05, 0xFB, 0xF0, 0xFF, 0xD9, 0x5B, 0xC8,
0xFF, 0xD0, 0x9A, 0xBE, 0x00, 0x00, 0x10, 0xA9, 0xFF, 0xF4, 0x1E, 0xB2, 0x00, 0xCE, 0xBB, 0xF7,
0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x04, 0x00, 0x02, 0x00, 0x02, 0x02, 0x00, 0x00, 0x0C,
0xFF, 0xC2, 0x80, 0x00, 0x00, 0x01, 0x80, 0x00, 0x00, 0xCF, 0x80, 0x00, 0x40, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x06, 0x00, 0x00, 0x00, 0x00, 0x14,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x03, 0x3F, 0x68, 0xB6, 0x79, 0x35, 0x28, 0xBC, 0xC6, 0x7E, 0xD1, 0x6C,
0x80, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0xB2, 0x6A, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F, 0xF0, 0x00, 0x00, 0x00, 0x30,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x25, 0x4D, 0x00, 0x2F, 0x70, 0x6D, 0x00, 0x00, 0x05, 0xAE, 0x00, 0x0C, 0x02, 0xD0,
// bank 2, 256 bytes
0x00, 0x00, 0x00, 0x00, 0x00, 0x65, 0x00, 0x54, 0xFF, 0xEF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x01, 0x00, 0x00, 0x44, 0x00, 0x00, 0x00, 0x00, 0x0C, 0x00, 0x00, 0x00, 0x01, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x65, 0x00, 0x00, 0x00, 0x54, 0x00, 0x00, 0xFF, 0xEF, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x40, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x02, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x1B, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x00,
0x00, 0x1B, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
// bank 3, 256 bytes
0xD8, 0xDC, 0xBA, 0xA2, 0xF1, 0xDE, 0xB2, 0xB8, 0xB4, 0xA8, 0x81, 0x91, 0xF7, 0x4A, 0x90, 0x7F,
0x91, 0x6A, 0xF3, 0xF9, 0xDB, 0xA8, 0xF9, 0xB0, 0xBA, 0xA0, 0x80, 0xF2, 0xCE, 0x81, 0xF3, 0xC2,
0xF1, 0xC1, 0xF2, 0xC3, 0xF3, 0xCC, 0xA2, 0xB2, 0x80, 0xF1, 0xC6, 0xD8, 0x80, 0xBA, 0xA7, 0xDF,
0xDF, 0xDF, 0xF2, 0xA7, 0xC3, 0xCB, 0xC5, 0xB6, 0xF0, 0x87, 0xA2, 0x94, 0x24, 0x48, 0x70, 0x3C,
0x95, 0x40, 0x68, 0x34, 0x58, 0x9B, 0x78, 0xA2, 0xF1, 0x83, 0x92, 0x2D, 0x55, 0x7D, 0xD8, 0xB1,
0xB4, 0xB8, 0xA1, 0xD0, 0x91, 0x80, 0xF2, 0x70, 0xF3, 0x70, 0xF2, 0x7C, 0x80, 0xA8, 0xF1, 0x01,
0xB0, 0x98, 0x87, 0xD9, 0x43, 0xD8, 0x86, 0xC9, 0x88, 0xBA, 0xA1, 0xF2, 0x0E, 0xB8, 0x97, 0x80,
0xF1, 0xA9, 0xDF, 0xDF, 0xDF, 0xAA, 0xDF, 0xDF, 0xDF, 0xF2, 0xAA, 0xC5, 0xCD, 0xC7, 0xA9, 0x0C,
0xC9, 0x2C, 0x97, 0x97, 0x97, 0x97, 0xF1, 0xA9, 0x89, 0x26, 0x46, 0x66, 0xB0, 0xB4, 0xBA, 0x80,
0xAC, 0xDE, 0xF2, 0xCA, 0xF1, 0xB2, 0x8C, 0x02, 0xA9, 0xB6, 0x98, 0x00, 0x89, 0x0E, 0x16, 0x1E,
0xB8, 0xA9, 0xB4, 0x99, 0x2C, 0x54, 0x7C, 0xB0, 0x8A, 0xA8, 0x96, 0x36, 0x56, 0x76, 0xF1, 0xB9,
0xAF, 0xB4, 0xB0, 0x83, 0xC0, 0xB8, 0xA8, 0x97, 0x11, 0xB1, 0x8F, 0x98, 0xB9, 0xAF, 0xF0, 0x24,
0x08, 0x44, 0x10, 0x64, 0x18, 0xF1, 0xA3, 0x29, 0x55, 0x7D, 0xAF, 0x83, 0xB5, 0x93, 0xAF, 0xF0,
0x00, 0x28, 0x50, 0xF1, 0xA3, 0x86, 0x9F, 0x61, 0xA6, 0xDA, 0xDE, 0xDF, 0xD9, 0xFA, 0xA3, 0x86,
0x96, 0xDB, 0x31, 0xA6, 0xD9, 0xF8, 0xDF, 0xBA, 0xA6, 0x8F, 0xC2, 0xC5, 0xC7, 0xB2, 0x8C, 0xC1,
0xB8, 0xA2, 0xDF, 0xDF, 0xDF, 0xA3, 0xDF, 0xDF, 0xDF, 0xD8, 0xD8, 0xF1, 0xB8, 0xA8, 0xB2, 0x86,
// bank 4, 256 bytes
0xB4, 0x98, 0x0D, 0x35, 0x5D, 0xB8, 0xAA, 0x98, 0xB0, 0x87, 0x2D, 0x35, 0x3D, 0xB2, 0xB6, 0xBA,
0xAF, 0x8C, 0x96, 0x19, 0x8F, 0x9F, 0xA7, 0x0E, 0x16, 0x1E, 0xB4, 0x9A, 0xB8, 0xAA, 0x87, 0x2C,
0x54, 0x7C, 0xB9, 0xA3, 0xDE, 0xDF, 0xDF, 0xA3, 0xB1, 0x80, 0xF2, 0xC4, 0xCD, 0xC9, 0xF1, 0xB8,
0xA9, 0xB4, 0x99, 0x83, 0x0D, 0x35, 0x5D, 0x89, 0xB9, 0xA3, 0x2D, 0x55, 0x7D, 0xB5, 0x93, 0xA3,
0x0E, 0x16, 0x1E, 0xA9, 0x2C, 0x54, 0x7C, 0xB8, 0xB4, 0xB0, 0xF1, 0x97, 0x83, 0xA8, 0x11, 0x84,
0xA5, 0x09, 0x98, 0xA3, 0x83, 0xF0, 0xDA, 0x24, 0x08, 0x44, 0x10, 0x64, 0x18, 0xD8, 0xF1, 0xA5,
0x29, 0x55, 0x7D, 0xA5, 0x85, 0x95, 0x02, 0x1A, 0x2E, 0x3A, 0x56, 0x5A, 0x40, 0x48, 0xF9, 0xF3,
0xA3, 0xD9, 0xF8, 0xF0, 0x98, 0x83, 0x24, 0x08, 0x44, 0x10, 0x64, 0x18, 0x97, 0x82, 0xA8, 0xF1,
0x11, 0xF0, 0x98, 0xA2, 0x24, 0x08, 0x44, 0x10, 0x64, 0x18, 0xDA, 0xF3, 0xDE, 0xD8, 0x83, 0xA5,
0x94, 0x01, 0xD9, 0xA3, 0x02, 0xF1, 0xA2, 0xC3, 0xC5, 0xC7, 0xD8, 0xF1, 0x84, 0x92, 0xA2, 0x4D,
0xDA, 0x2A, 0xD8, 0x48, 0x69, 0xD9, 0x2A, 0xD8, 0x68, 0x55, 0xDA, 0x32, 0xD8, 0x50, 0x71, 0xD9,
0x32, 0xD8, 0x70, 0x5D, 0xDA, 0x3A, 0xD8, 0x58, 0x79, 0xD9, 0x3A, 0xD8, 0x78, 0x93, 0xA3, 0x4D,
0xDA, 0x2A, 0xD8, 0x48, 0x69, 0xD9, 0x2A, 0xD8, 0x68, 0x55, 0xDA, 0x32, 0xD8, 0x50, 0x71, 0xD9,
0x32, 0xD8, 0x70, 0x5D, 0xDA, 0x3A, 0xD8, 0x58, 0x79, 0xD9, 0x3A, 0xD8, 0x78, 0xA8, 0x8A, 0x9A,
0xF0, 0x28, 0x50, 0x78, 0x9E, 0xF3, 0x88, 0x18, 0xF1, 0x9F, 0x1D, 0x98, 0xA8, 0xD9, 0x08, 0xD8,
0xC8, 0x9F, 0x12, 0x9E, 0xF3, 0x15, 0xA8, 0xDA, 0x12, 0x10, 0xD8, 0xF1, 0xAF, 0xC8, 0x97, 0x87,
// bank 5, 256 bytes
0x34, 0xB5, 0xB9, 0x94, 0xA4, 0x21, 0xF3, 0xD9, 0x22, 0xD8, 0xF2, 0x2D, 0xF3, 0xD9, 0x2A, 0xD8,
0xF2, 0x35, 0xF3, 0xD9, 0x32, 0xD8, 0x81, 0xA4, 0x60, 0x60, 0x61, 0xD9, 0x61, 0xD8, 0x6C, 0x68,
0x69, 0xD9, 0x69, 0xD8, 0x74, 0x70, 0x71, 0xD9, 0x71, 0xD8, 0xB1, 0xA3, 0x84, 0x19, 0x3D, 0x5D,
0xA3, 0x83, 0x1A, 0x3E, 0x5E, 0x93, 0x10, 0x30, 0x81, 0x10, 0x11, 0xB8, 0xB0, 0xAF, 0x8F, 0x94,
0xF2, 0xDA, 0x3E, 0xD8, 0xB4, 0x9A, 0xA8, 0x87, 0x29, 0xDA, 0xF8, 0xD8, 0x87, 0x9A, 0x35, 0xDA,
0xF8, 0xD8, 0x87, 0x9A, 0x3D, 0xDA, 0xF8, 0xD8, 0xB1, 0xB9, 0xA4, 0x98, 0x85, 0x02, 0x2E, 0x56,
0xA5, 0x81, 0x00, 0x0C, 0x14, 0xA3, 0x97, 0xB0, 0x8A, 0xF1, 0x2D, 0xD9, 0x28, 0xD8, 0x4D, 0xD9,
0x48, 0xD8, 0x6D, 0xD9, 0x68, 0xD8, 0xB1, 0x84, 0x0D, 0xDA, 0x0E, 0xD8, 0xA3, 0x29, 0x83, 0xDA,
0x2C, 0x0E, 0xD8, 0xA3, 0x84, 0x49, 0x83, 0xDA, 0x2C, 0x4C, 0x0E, 0xD8, 0xB8, 0xB0, 0xA8, 0x8A,
0x9A, 0xF5, 0x20, 0xAA, 0xDA, 0xDF, 0xD8, 0xA8, 0x40, 0xAA, 0xD0, 0xDA, 0xDE, 0xD8, 0xA8, 0x60,
0xAA, 0xDA, 0xD0, 0xDF, 0xD8, 0xF1, 0x97, 0x86, 0xA8, 0x31, 0x9B, 0x06, 0x99, 0x07, 0xAB, 0x97,
0x28, 0x88, 0x9B, 0xF0, 0x0C, 0x20, 0x14, 0x40, 0xB8, 0xB0, 0xB4, 0xA8, 0x8C, 0x9C, 0xF0, 0x04,
0x28, 0x51, 0x79, 0x1D, 0x30, 0x14, 0x38, 0xB2, 0x82, 0xAB, 0xD0, 0x98, 0x2C, 0x50, 0x50, 0x78,
0x78, 0x9B, 0xF1, 0x1A, 0xB0, 0xF0, 0x8A, 0x9C, 0xA8, 0x29, 0x51, 0x79, 0x8B, 0x29, 0x51, 0x79,
0x8A, 0x24, 0x70, 0x59, 0x8B, 0x20, 0x58, 0x71, 0x8A, 0x44, 0x69, 0x38, 0x8B, 0x39, 0x40, 0x68,
0x8A, 0x64, 0x48, 0x31, 0x8B, 0x30, 0x49, 0x60, 0xA5, 0x88, 0x20, 0x09, 0x71, 0x58, 0x44, 0x68,
// bank 6, 256 bytes
0x11, 0x39, 0x64, 0x49, 0x30, 0x19, 0xF1, 0xAC, 0x00, 0x2C, 0x54, 0x7C, 0xF0, 0x8C, 0xA8, 0x04,
0x28, 0x50, 0x78, 0xF1, 0x88, 0x97, 0x26, 0xA8, 0x59, 0x98, 0xAC, 0x8C, 0x02, 0x26, 0x46, 0x66,
0xF0, 0x89, 0x9C, 0xA8, 0x29, 0x51, 0x79, 0x24, 0x70, 0x59, 0x44, 0x69, 0x38, 0x64, 0x48, 0x31,
0xA9, 0x88, 0x09, 0x20, 0x59, 0x70, 0xAB, 0x11, 0x38, 0x40, 0x69, 0xA8, 0x19, 0x31, 0x48, 0x60,
0x8C, 0xA8, 0x3C, 0x41, 0x5C, 0x20, 0x7C, 0x00, 0xF1, 0x87, 0x98, 0x19, 0x86, 0xA8, 0x6E, 0x76,
0x7E, 0xA9, 0x99, 0x88, 0x2D, 0x55, 0x7D, 0x9E, 0xB9, 0xA3, 0x8A, 0x22, 0x8A, 0x6E, 0x8A, 0x56,
0x8A, 0x5E, 0x9F, 0xB1, 0x83, 0x06, 0x26, 0x46, 0x66, 0x0E, 0x2E, 0x4E, 0x6E, 0x9D, 0xB8, 0xAD,
0x00, 0x2C, 0x54, 0x7C, 0xF2, 0xB1, 0x8C, 0xB4, 0x99, 0xB9, 0xA3, 0x2D, 0x55, 0x7D, 0x81, 0x91,
0xAC, 0x38, 0xAD, 0x3A, 0xB5, 0x83, 0x91, 0xAC, 0x2D, 0xD9, 0x28, 0xD8, 0x4D, 0xD9, 0x48, 0xD8,
0x6D, 0xD9, 0x68, 0xD8, 0x8C, 0x9D, 0xAE, 0x29, 0xD9, 0x04, 0xAE, 0xD8, 0x51, 0xD9, 0x04, 0xAE,
0xD8, 0x79, 0xD9, 0x04, 0xD8, 0x81, 0xF3, 0x9D, 0xAD, 0x00, 0x8D, 0xAE, 0x19, 0x81, 0xAD, 0xD9,
0x01, 0xD8, 0xF2, 0xAE, 0xDA, 0x26, 0xD8, 0x8E, 0x91, 0x29, 0x83, 0xA7, 0xD9, 0xAD, 0xAD, 0xAD,
0xAD, 0xF3, 0x2A, 0xD8, 0xD8, 0xF1, 0xB0, 0xAC, 0x89, 0x91, 0x3E, 0x5E, 0x76, 0xF3, 0xAC, 0x2E,
0x2E, 0xF1, 0xB1, 0x8C, 0x5A, 0x9C, 0xAC, 0x2C, 0x28, 0x28, 0x28, 0x9C, 0xAC, 0x30, 0x18, 0xA8,
0x98, 0x81, 0x28, 0x34, 0x3C, 0x97, 0x24, 0xA7, 0x28, 0x34, 0x3C, 0x9C, 0x24, 0xF2, 0xB0, 0x89,
0xAC, 0x91, 0x2C, 0x4C, 0x6C, 0x8A, 0x9B, 0x2D, 0xD9, 0xD8, 0xD8, 0x51, 0xD9, 0xD8, 0xD8, 0x79,
// bank 7, 138 bytes (remainder)
0xD9, 0xD8, 0xD8, 0xF1, 0x9E, 0x88, 0xA3, 0x31, 0xDA, 0xD8, 0xD8, 0x91, 0x2D, 0xD9, 0x28, 0xD8,
0x4D, 0xD9, 0x48, 0xD8, 0x6D, 0xD9, 0x68, 0xD8, 0xB1, 0x83, 0x93, 0x35, 0x3D, 0x80, 0x25, 0xDA,
0xD8, 0xD8, 0x85, 0x69, 0xDA, 0xD8, 0xD8, 0xB4, 0x93, 0x81, 0xA3, 0x28, 0x34, 0x3C, 0xF3, 0xAB,
0x8B, 0xF8, 0xA3, 0x91, 0xB6, 0x09, 0xB4, 0xD9, 0xAB, 0xDE, 0xFA, 0xB0, 0x87, 0x9C, 0xB9, 0xA3,
0xDD, 0xF1, 0xA3, 0xA3, 0xA3, 0xA3, 0x95, 0xF1, 0xA3, 0xA3, 0xA3, 0x9D, 0xF1, 0xA3, 0xA3, 0xA3,
0xA3, 0xF2, 0xA3, 0xB4, 0x90, 0x80, 0xF2, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3,
0xA3, 0xB2, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xA3, 0xB0, 0x87, 0xB5, 0x99, 0xF1, 0xA3, 0xA3, 0xA3,
0x98, 0xF1, 0xA3, 0xA3, 0xA3, 0xA3, 0x97, 0xA3, 0xA3, 0xA3, 0xA3, 0xF3, 0x9B, 0xA3, 0xA3, 0xDC,
0xB9, 0xA7, 0xF1, 0x26, 0x26, 0x26, 0xD8, 0xD8, 0xFF
};
// thanks to Noah Zerkin for piecing this stuff together!
const unsigned char dmpConfig[MPU6050_DMP_CONFIG_SIZE] PROGMEM = {
// BANK OFFSET LENGTH [DATA]
0x03, 0x7B, 0x03, 0x4C, 0xCD, 0x6C, // FCFG_1 inv_set_gyro_calibration
0x03, 0xAB, 0x03, 0x36, 0x56, 0x76, // FCFG_3 inv_set_gyro_calibration
0x00, 0x68, 0x04, 0x02, 0xCB, 0x47, 0xA2, // D_0_104 inv_set_gyro_calibration
0x02, 0x18, 0x04, 0x00, 0x05, 0x8B, 0xC1, // D_0_24 inv_set_gyro_calibration
0x01, 0x0C, 0x04, 0x00, 0x00, 0x00, 0x00, // D_1_152 inv_set_accel_calibration
0x03, 0x7F, 0x06, 0x0C, 0xC9, 0x2C, 0x97, 0x97, 0x97, // FCFG_2 inv_set_accel_calibration
0x03, 0x89, 0x03, 0x26, 0x46, 0x66, // FCFG_7 inv_set_accel_calibration
0x00, 0x6C, 0x02, 0x20, 0x00, // D_0_108 inv_set_accel_calibration
0x02, 0x40, 0x04, 0x00, 0x00, 0x00, 0x00, // CPASS_MTX_00 inv_set_compass_calibration
0x02, 0x44, 0x04, 0x00, 0x00, 0x00, 0x00, // CPASS_MTX_01
0x02, 0x48, 0x04, 0x00, 0x00, 0x00, 0x00, // CPASS_MTX_02
0x02, 0x4C, 0x04, 0x00, 0x00, 0x00, 0x00, // CPASS_MTX_10
0x02, 0x50, 0x04, 0x00, 0x00, 0x00, 0x00, // CPASS_MTX_11
0x02, 0x54, 0x04, 0x00, 0x00, 0x00, 0x00, // CPASS_MTX_12
0x02, 0x58, 0x04, 0x00, 0x00, 0x00, 0x00, // CPASS_MTX_20
0x02, 0x5C, 0x04, 0x00, 0x00, 0x00, 0x00, // CPASS_MTX_21
0x02, 0xBC, 0x04, 0x00, 0x00, 0x00, 0x00, // CPASS_MTX_22
0x01, 0xEC, 0x04, 0x00, 0x00, 0x40, 0x00, // D_1_236 inv_apply_endian_accel
0x03, 0x7F, 0x06, 0x0C, 0xC9, 0x2C, 0x97, 0x97, 0x97, // FCFG_2 inv_set_mpu_sensors
0x04, 0x02, 0x03, 0x0D, 0x35, 0x5D, // CFG_MOTION_BIAS inv_turn_on_bias_from_no_motion
0x04, 0x09, 0x04, 0x87, 0x2D, 0x35, 0x3D, // FCFG_5 inv_set_bias_update
0x00, 0xA3, 0x01, 0x00, // D_0_163 inv_set_dead_zone
// SPECIAL 0x01 = enable interrupts
0x00, 0x00, 0x00, 0x01, // SET INT_ENABLE at i=22, SPECIAL INSTRUCTION
0x07, 0x86, 0x01, 0xFE, // CFG_6 inv_set_fifo_interupt
0x07, 0x41, 0x05, 0xF1, 0x20, 0x28, 0x30, 0x38, // CFG_8 inv_send_quaternion
0x07, 0x7E, 0x01, 0x30, // CFG_16 inv_set_footer
0x07, 0x46, 0x01, 0x9A, // CFG_GYRO_SOURCE inv_send_gyro
0x07, 0x47, 0x04, 0xF1, 0x28, 0x30, 0x38, // CFG_9 inv_send_gyro -> inv_construct3_fifo
0x07, 0x6C, 0x04, 0xF1, 0x28, 0x30, 0x38, // CFG_12 inv_send_accel -> inv_construct3_fifo
0x02, 0x16, 0x02, 0x00, 0x02 //(0x07 -> 16Mhz) D_0_22 inv_set_fifo_rate (0x06 for first 8mhz board) (0x09 for 8Mhz board from Binoy)
// This very last 0x01 WAS a 0x09, which drops the FIFO rate down to 20 Hz. 0x07 is 25 Hz,
// 0x01 is 100Hz. Going faster than 100Hz (0x00=200Hz) tends to result in very noisy data.
// DMP output frequency is calculated easily using this equation: (200Hz / (1 + value))
// It is important to make sure the host processor can keep up with reading and processing
// the FIFO output at the desired rate. Handling FIFO overflow cleanly is also a good idea.
};
const unsigned char dmpUpdates[MPU6050_DMP_UPDATES_SIZE] PROGMEM = {
0x01, 0xB2, 0x02, 0xFF, 0xFF,
0x01, 0x90, 0x04, 0x09, 0x23, 0xA1, 0x35,
0x01, 0x6A, 0x02, 0x06, 0x00,
0x01, 0x60, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x60, 0x04, 0x40, 0x00, 0x00, 0x00,
0x01, 0x62, 0x02, 0x00, 0x00,
0x00, 0x60, 0x04, 0x00, 0x40, 0x00, 0x00
};
uint8_t MPU6050::dmpInitialize() {
// reset device
DEBUG_PRINTLN(F("\n\nResetting MPU6050..."));
reset();
delay(30); // wait after reset
// enable sleep mode and wake cycle
/*Serial.println(F("Enabling sleep mode..."));
setSleepEnabled(true);
Serial.println(F("Enabling wake cycle..."));
setWakeCycleEnabled(true);*/
// disable sleep mode
DEBUG_PRINTLN(F("Disabling sleep mode..."));
setSleepEnabled(false);
// get MPU hardware revision
DEBUG_PRINTLN(F("Selecting user bank 16..."));
setMemoryBank(0x10, true, true);
DEBUG_PRINTLN(F("Selecting memory byte 6..."));
setMemoryStartAddress(0x06);
DEBUG_PRINTLN(F("Checking hardware revision..."));
uint8_t hwRevision = readMemoryByte();
DEBUG_PRINT(F("Revision @ user[16][6] = "));
DEBUG_PRINTLNF(hwRevision, HEX);
DEBUG_PRINTLN(F("Resetting memory bank selection to 0..."));
setMemoryBank(0, false, false);
// check OTP bank valid
DEBUG_PRINTLN(F("Reading OTP bank valid flag..."));
uint8_t otpValid = getOTPBankValid();
DEBUG_PRINT(F("OTP bank is "));
DEBUG_PRINTLN(otpValid ? F("valid!") : F("invalid!"));
// get X/Y/Z gyro offsets
DEBUG_PRINTLN(F("Reading gyro offset TC values..."));
int8_t xgOffsetTC = getXGyroOffsetTC();
int8_t ygOffsetTC = getYGyroOffsetTC();
int8_t zgOffsetTC = getZGyroOffsetTC();
DEBUG_PRINT(F("X gyro offset = "));
DEBUG_PRINTLN(xgOffset);
DEBUG_PRINT(F("Y gyro offset = "));
DEBUG_PRINTLN(ygOffset);
DEBUG_PRINT(F("Z gyro offset = "));
DEBUG_PRINTLN(zgOffset);
// setup weird slave stuff (?)
DEBUG_PRINTLN(F("Setting slave 0 address to 0x7F..."));
setSlaveAddress(0, 0x7F);
DEBUG_PRINTLN(F("Disabling I2C Master mode..."));
setI2CMasterModeEnabled(false);
DEBUG_PRINTLN(F("Setting slave 0 address to 0x68 (self)..."));
setSlaveAddress(0, 0x68);
DEBUG_PRINTLN(F("Resetting I2C Master control..."));
resetI2CMaster();
delay(20);
// load DMP code into memory banks
DEBUG_PRINT(F("Writing DMP code to MPU memory banks ("));
DEBUG_PRINT(MPU6050_DMP_CODE_SIZE);
DEBUG_PRINTLN(F(" bytes)"));
if (writeProgMemoryBlock(dmpMemory, MPU6050_DMP_CODE_SIZE)) {
DEBUG_PRINTLN(F("Success! DMP code written and verified."));
// write DMP configuration
DEBUG_PRINT(F("Writing DMP configuration to MPU memory banks ("));
DEBUG_PRINT(MPU6050_DMP_CONFIG_SIZE);
DEBUG_PRINTLN(F(" bytes in config def)"));
if (writeProgDMPConfigurationSet(dmpConfig, MPU6050_DMP_CONFIG_SIZE)) {
DEBUG_PRINTLN(F("Success! DMP configuration written and verified."));
DEBUG_PRINTLN(F("Setting clock source to Z Gyro..."));
setClockSource(MPU6050_CLOCK_PLL_ZGYRO);
DEBUG_PRINTLN(F("Setting DMP and FIFO_OFLOW interrupts enabled..."));
setIntEnabled(0x12);
DEBUG_PRINTLN(F("Setting sample rate to 200Hz..."));
setRate(4); // 1khz / (1 + 4) = 200 Hz
DEBUG_PRINTLN(F("Setting external frame sync to TEMP_OUT_L[0]..."));
setExternalFrameSync(MPU6050_EXT_SYNC_TEMP_OUT_L);
DEBUG_PRINTLN(F("Setting DLPF bandwidth to 42Hz..."));
setDLPFMode(MPU6050_DLPF_BW_42);
DEBUG_PRINTLN(F("Setting gyro sensitivity to +/- 2000 deg/sec..."));
setFullScaleGyroRange(MPU6050_GYRO_FS_2000);
DEBUG_PRINTLN(F("Setting DMP configuration bytes (function unknown)..."));
setDMPConfig1(0x03);
setDMPConfig2(0x00);
DEBUG_PRINTLN(F("Clearing OTP Bank flag..."));
setOTPBankValid(false);
DEBUG_PRINTLN(F("Setting X/Y/Z gyro offset TCs to previous values..."));
setXGyroOffsetTC(xgOffsetTC);
setYGyroOffsetTC(ygOffsetTC);
setZGyroOffsetTC(zgOffsetTC);
//DEBUG_PRINTLN(F("Setting X/Y/Z gyro user offsets to zero..."));
//setXGyroOffset(0);
//setYGyroOffset(0);
//setZGyroOffset(0);
DEBUG_PRINTLN(F("Writing final memory update 1/7 (function unknown)..."));
uint8_t dmpUpdate[16], j;
uint16_t pos = 0;
for (j = 0; j < 4 || j < dmpUpdate[2] + 3; j++, pos++) dmpUpdate[j] = pgm_read_byte(&dmpUpdates[pos]);
writeMemoryBlock(dmpUpdate + 3, dmpUpdate[2], dmpUpdate[0], dmpUpdate[1]);
DEBUG_PRINTLN(F("Writing final memory update 2/7 (function unknown)..."));
for (j = 0; j < 4 || j < dmpUpdate[2] + 3; j++, pos++) dmpUpdate[j] = pgm_read_byte(&dmpUpdates[pos]);
writeMemoryBlock(dmpUpdate + 3, dmpUpdate[2], dmpUpdate[0], dmpUpdate[1]);
DEBUG_PRINTLN(F("Resetting FIFO..."));
resetFIFO();
DEBUG_PRINTLN(F("Reading FIFO count..."));
uint16_t fifoCount = getFIFOCount();
uint8_t fifoBuffer[128];
DEBUG_PRINT(F("Current FIFO count="));
DEBUG_PRINTLN(fifoCount);
getFIFOBytes(fifoBuffer, fifoCount);
DEBUG_PRINTLN(F("Setting motion detection threshold to 2..."));
setMotionDetectionThreshold(2);
DEBUG_PRINTLN(F("Setting zero-motion detection threshold to 156..."));
setZeroMotionDetectionThreshold(156);
DEBUG_PRINTLN(F("Setting motion detection duration to 80..."));
setMotionDetectionDuration(80);
DEBUG_PRINTLN(F("Setting zero-motion detection duration to 0..."));
setZeroMotionDetectionDuration(0);
DEBUG_PRINTLN(F("Resetting FIFO..."));
resetFIFO();
DEBUG_PRINTLN(F("Enabling FIFO..."));
setFIFOEnabled(true);
DEBUG_PRINTLN(F("Enabling DMP..."));
setDMPEnabled(true);
DEBUG_PRINTLN(F("Resetting DMP..."));
resetDMP();
DEBUG_PRINTLN(F("Writing final memory update 3/7 (function unknown)..."));
for (j = 0; j < 4 || j < dmpUpdate[2] + 3; j++, pos++) dmpUpdate[j] = pgm_read_byte(&dmpUpdates[pos]);
writeMemoryBlock(dmpUpdate + 3, dmpUpdate[2], dmpUpdate[0], dmpUpdate[1]);
DEBUG_PRINTLN(F("Writing final memory update 4/7 (function unknown)..."));
for (j = 0; j < 4 || j < dmpUpdate[2] + 3; j++, pos++) dmpUpdate[j] = pgm_read_byte(&dmpUpdates[pos]);
writeMemoryBlock(dmpUpdate + 3, dmpUpdate[2], dmpUpdate[0], dmpUpdate[1]);
DEBUG_PRINTLN(F("Writing final memory update 5/7 (function unknown)..."));
for (j = 0; j < 4 || j < dmpUpdate[2] + 3; j++, pos++) dmpUpdate[j] = pgm_read_byte(&dmpUpdates[pos]);
writeMemoryBlock(dmpUpdate + 3, dmpUpdate[2], dmpUpdate[0], dmpUpdate[1]);
DEBUG_PRINTLN(F("Waiting for FIFO count > 2..."));
while ((fifoCount = getFIFOCount()) < 3);
DEBUG_PRINT(F("Current FIFO count="));
DEBUG_PRINTLN(fifoCount);
DEBUG_PRINTLN(F("Reading FIFO data..."));
getFIFOBytes(fifoBuffer, fifoCount);
DEBUG_PRINTLN(F("Reading interrupt status..."));
uint8_t mpuIntStatus = getIntStatus();
DEBUG_PRINT(F("Current interrupt status="));
DEBUG_PRINTLNF(mpuIntStatus, HEX);
DEBUG_PRINTLN(F("Reading final memory update 6/7 (function unknown)..."));
for (j = 0; j < 4 || j < dmpUpdate[2] + 3; j++, pos++) dmpUpdate[j] = pgm_read_byte(&dmpUpdates[pos]);
readMemoryBlock(dmpUpdate + 3, dmpUpdate[2], dmpUpdate[0], dmpUpdate[1]);
DEBUG_PRINTLN(F("Waiting for FIFO count > 2..."));
while ((fifoCount = getFIFOCount()) < 3);
DEBUG_PRINT(F("Current FIFO count="));
DEBUG_PRINTLN(fifoCount);
DEBUG_PRINTLN(F("Reading FIFO data..."));
getFIFOBytes(fifoBuffer, fifoCount);
DEBUG_PRINTLN(F("Reading interrupt status..."));
mpuIntStatus = getIntStatus();
DEBUG_PRINT(F("Current interrupt status="));
DEBUG_PRINTLNF(mpuIntStatus, HEX);
DEBUG_PRINTLN(F("Writing final memory update 7/7 (function unknown)..."));
for (j = 0; j < 4 || j < dmpUpdate[2] + 3; j++, pos++) dmpUpdate[j] = pgm_read_byte(&dmpUpdates[pos]);
writeMemoryBlock(dmpUpdate + 3, dmpUpdate[2], dmpUpdate[0], dmpUpdate[1]);
DEBUG_PRINTLN(F("DMP is good to go! Finally."));
DEBUG_PRINTLN(F("Disabling DMP (you turn it on later)..."));
setDMPEnabled(false);
DEBUG_PRINTLN(F("Setting up internal 42-byte (default) DMP packet buffer..."));
dmpPacketSize = 42;
/*if ((dmpPacketBuffer = (uint8_t *)malloc(42)) == 0) {
return 3; // TODO: proper error code for no memory
}*/
DEBUG_PRINTLN(F("Resetting FIFO and clearing INT status one last time..."));
resetFIFO();
getIntStatus();
} else {
DEBUG_PRINTLN(F("ERROR! DMP configuration verification failed."));
return 2; // configuration block loading failed
}
} else {
DEBUG_PRINTLN(F("ERROR! DMP code verification failed."));
return 1; // main binary block loading failed
}
return 0; // success
}
bool MPU6050::dmpPacketAvailable() {
return getFIFOCount() >= dmpGetFIFOPacketSize();
}
// uint8_t MPU6050::dmpSetFIFORate(uint8_t fifoRate);
// uint8_t MPU6050::dmpGetFIFORate();
// uint8_t MPU6050::dmpGetSampleStepSizeMS();
// uint8_t MPU6050::dmpGetSampleFrequency();
// int32_t MPU6050::dmpDecodeTemperature(int8_t tempReg);
//uint8_t MPU6050::dmpRegisterFIFORateProcess(inv_obj_func func, int16_t priority);
//uint8_t MPU6050::dmpUnregisterFIFORateProcess(inv_obj_func func);
//uint8_t MPU6050::dmpRunFIFORateProcesses();
// uint8_t MPU6050::dmpSendQuaternion(uint_fast16_t accuracy);
// uint8_t MPU6050::dmpSendGyro(uint_fast16_t elements, uint_fast16_t accuracy);
// uint8_t MPU6050::dmpSendAccel(uint_fast16_t elements, uint_fast16_t accuracy);
// uint8_t MPU6050::dmpSendLinearAccel(uint_fast16_t elements, uint_fast16_t accuracy);
// uint8_t MPU6050::dmpSendLinearAccelInWorld(uint_fast16_t elements, uint_fast16_t accuracy);
// uint8_t MPU6050::dmpSendControlData(uint_fast16_t elements, uint_fast16_t accuracy);
// uint8_t MPU6050::dmpSendSensorData(uint_fast16_t elements, uint_fast16_t accuracy);
// uint8_t MPU6050::dmpSendExternalSensorData(uint_fast16_t elements, uint_fast16_t accuracy);
// uint8_t MPU6050::dmpSendGravity(uint_fast16_t elements, uint_fast16_t accuracy);
// uint8_t MPU6050::dmpSendPacketNumber(uint_fast16_t accuracy);
// uint8_t MPU6050::dmpSendQuantizedAccel(uint_fast16_t elements, uint_fast16_t accuracy);
// uint8_t MPU6050::dmpSendEIS(uint_fast16_t elements, uint_fast16_t accuracy);
uint8_t MPU6050::dmpGetAccel(int32_t *data, const uint8_t* packet) {
// TODO: accommodate different arrangements of sent data (ONLY default supported now)
if (packet == 0) packet = dmpPacketBuffer;
data[0] = ((packet[28] << 24) + (packet[29] << 16) + (packet[30] << 8) + packet[31]);
data[1] = ((packet[32] << 24) + (packet[33] << 16) + (packet[34] << 8) + packet[35]);
data[2] = ((packet[36] << 24) + (packet[37] << 16) + (packet[38] << 8) + packet[39]);
return 0;
}
uint8_t MPU6050::dmpGetAccel(int16_t *data, const uint8_t* packet) {
// TODO: accommodate different arrangements of sent data (ONLY default supported now)
if (packet == 0) packet = dmpPacketBuffer;
data[0] = (packet[28] << 8) + packet[29];
data[1] = (packet[32] << 8) + packet[33];
data[2] = (packet[36] << 8) + packet[37];
return 0;
}
uint8_t MPU6050::dmpGetAccel(VectorInt16 *v, const uint8_t* packet) {
// TODO: accommodate different arrangements of sent data (ONLY default supported now)
if (packet == 0) packet = dmpPacketBuffer;
v -> x = (packet[28] << 8) + packet[29];
v -> y = (packet[32] << 8) + packet[33];
v -> z = (packet[36] << 8) + packet[37];
return 0;
}
uint8_t MPU6050::dmpGetQuaternion(int32_t *data, const uint8_t* packet) {
// TODO: accommodate different arrangements of sent data (ONLY default supported now)
if (packet == 0) packet = dmpPacketBuffer;
data[0] = ((packet[0] << 24) + (packet[1] << 16) + (packet[2] << 8) + packet[3]);
data[1] = ((packet[4] << 24) + (packet[5] << 16) + (packet[6] << 8) + packet[7]);
data[2] = ((packet[8] << 24) + (packet[9] << 16) + (packet[10] << 8) + packet[11]);
data[3] = ((packet[12] << 24) + (packet[13] << 16) + (packet[14] << 8) + packet[15]);
return 0;
}
uint8_t MPU6050::dmpGetQuaternion(int16_t *data, const uint8_t* packet) {
// TODO: accommodate different arrangements of sent data (ONLY default supported now)
if (packet == 0) packet = dmpPacketBuffer;
data[0] = ((packet[0] << 8) + packet[1]);
data[1] = ((packet[4] << 8) + packet[5]);
data[2] = ((packet[8] << 8) + packet[9]);
data[3] = ((packet[12] << 8) + packet[13]);
return 0;
}
uint8_t MPU6050::dmpGetQuaternion(Quaternion *q, const uint8_t* packet) {
// TODO: accommodate different arrangements of sent data (ONLY default supported now)
int16_t qI[4];
uint8_t status = dmpGetQuaternion(qI, packet);
if (status == 0) {
q -> w = (float)qI[0] / 16384.0f;
q -> x = (float)qI[1] / 16384.0f;
q -> y = (float)qI[2] / 16384.0f;
q -> z = (float)qI[3] / 16384.0f;
return 0;
}
return status; // int16 return value, indicates error if this line is reached
}
// uint8_t MPU6050::dmpGet6AxisQuaternion(long *data, const uint8_t* packet);
// uint8_t MPU6050::dmpGetRelativeQuaternion(long *data, const uint8_t* packet);
uint8_t MPU6050::dmpGetGyro(int32_t *data, const uint8_t* packet) {
// TODO: accommodate different arrangements of sent data (ONLY default supported now)
if (packet == 0) packet = dmpPacketBuffer;
data[0] = ((packet[16] << 24) + (packet[17] << 16) + (packet[18] << 8) + packet[19]);
data[1] = ((packet[20] << 24) + (packet[21] << 16) + (packet[22] << 8) + packet[23]);
data[2] = ((packet[24] << 24) + (packet[25] << 16) + (packet[26] << 8) + packet[27]);
return 0;
}
uint8_t MPU6050::dmpGetGyro(int16_t *data, const uint8_t* packet) {
// TODO: accommodate different arrangements of sent data (ONLY default supported now)
if (packet == 0) packet = dmpPacketBuffer;
data[0] = (packet[16] << 8) + packet[17];
data[1] = (packet[20] << 8) + packet[21];
data[2] = (packet[24] << 8) + packet[25];
return 0;
}
// uint8_t MPU6050::dmpSetLinearAccelFilterCoefficient(float coef);
// uint8_t MPU6050::dmpGetLinearAccel(long *data, const uint8_t* packet);
uint8_t MPU6050::dmpGetLinearAccel(VectorInt16 *v, VectorInt16 *vRaw, VectorFloat *gravity) {
// get rid of the gravity component (+1g = +8192 in standard DMP FIFO packet, sensitivity is 2g)
v -> x = vRaw -> x - gravity -> x*8192;
v -> y = vRaw -> y - gravity -> y*8192;
v -> z = vRaw -> z - gravity -> z*8192;
return 0;
}
// uint8_t MPU6050::dmpGetLinearAccelInWorld(long *data, const uint8_t* packet);
uint8_t MPU6050::dmpGetLinearAccelInWorld(VectorInt16 *v, VectorInt16 *vReal, Quaternion *q) {
// rotate measured 3D acceleration vector into original state
// frame of reference based on orientation quaternion
memcpy(v, vReal, sizeof(VectorInt16));
v -> rotate(q);
return 0;
}
// uint8_t MPU6050::dmpGetGyroAndAccelSensor(long *data, const uint8_t* packet);
// uint8_t MPU6050::dmpGetGyroSensor(long *data, const uint8_t* packet);
// uint8_t MPU6050::dmpGetControlData(long *data, const uint8_t* packet);
// uint8_t MPU6050::dmpGetTemperature(long *data, const uint8_t* packet);
// uint8_t MPU6050::dmpGetGravity(long *data, const uint8_t* packet);
uint8_t MPU6050::dmpGetGravity(VectorFloat *v, Quaternion *q) {
v -> x = 2 * (q -> x*q -> z - q -> w*q -> y);
v -> y = 2 * (q -> w*q -> x + q -> y*q -> z);
v -> z = q -> w*q -> w - q -> x*q -> x - q -> y*q -> y + q -> z*q -> z;
return 0;
}
// uint8_t MPU6050::dmpGetUnquantizedAccel(long *data, const uint8_t* packet);
// uint8_t MPU6050::dmpGetQuantizedAccel(long *data, const uint8_t* packet);
// uint8_t MPU6050::dmpGetExternalSensorData(long *data, int size, const uint8_t* packet);
// uint8_t MPU6050::dmpGetEIS(long *data, const uint8_t* packet);
uint8_t MPU6050::dmpGetEuler(float *data, Quaternion *q) {
data[0] = atan2(2*q -> x*q -> y - 2*q -> w*q -> z, 2*q -> w*q -> w + 2*q -> x*q -> x - 1); // psi
data[1] = -asin(2*q -> x*q -> z + 2*q -> w*q -> y); // theta
data[2] = atan2(2*q -> y*q -> z - 2*q -> w*q -> x, 2*q -> w*q -> w + 2*q -> z*q -> z - 1); // phi
return 0;
}
uint8_t MPU6050::dmpGetYawPitchRoll(float *data, Quaternion *q, VectorFloat *gravity) {
// yaw: (about Z axis)
data[0] = atan2(2*q -> x*q -> y - 2*q -> w*q -> z, 2*q -> w*q -> w + 2*q -> x*q -> x - 1);
// pitch: (nose up/down, about Y axis)
data[1] = atan(gravity -> x / sqrt(gravity -> y*gravity -> y + gravity -> z*gravity -> z));
// roll: (tilt left/right, about X axis)
data[2] = atan(gravity -> y / sqrt(gravity -> x*gravity -> x + gravity -> z*gravity -> z));
return 0;
}
// uint8_t MPU6050::dmpGetAccelFloat(float *data, const uint8_t* packet);
// uint8_t MPU6050::dmpGetQuaternionFloat(float *data, const uint8_t* packet);
uint8_t MPU6050::dmpProcessFIFOPacket(const unsigned char *dmpData) {
/*for (uint8_t k = 0; k < dmpPacketSize; k++) {
if (dmpData[k] < 0x10) Serial.print("0");
Serial.print(dmpData[k], HEX);
Serial.print(" ");
}
Serial.print("\n");*/
//Serial.println((uint16_t)dmpPacketBuffer);
return 0;
}
uint8_t MPU6050::dmpReadAndProcessFIFOPacket(uint8_t numPackets, uint8_t *processed) {
uint8_t status;
uint8_t buf[dmpPacketSize];
for (uint8_t i = 0; i < numPackets; i++) {
// read packet from FIFO
getFIFOBytes(buf, dmpPacketSize);
// process packet
if ((status = dmpProcessFIFOPacket(buf)) > 0) return status;
// increment external process count variable, if supplied
if (processed != 0) *processed++;
}
return 0;
}
// uint8_t MPU6050::dmpSetFIFOProcessedCallback(void (*func) (void));
// uint8_t MPU6050::dmpInitFIFOParam();
// uint8_t MPU6050::dmpCloseFIFO();
// uint8_t MPU6050::dmpSetGyroDataSource(uint_fast8_t source);
// uint8_t MPU6050::dmpDecodeQuantizedAccel();
// uint32_t MPU6050::dmpGetGyroSumOfSquare();
// uint32_t MPU6050::dmpGetAccelSumOfSquare();
// void MPU6050::dmpOverrideQuaternion(long *q);
uint16_t MPU6050::dmpGetFIFOPacketSize() {
return dmpPacketSize;
}
#endif /* _MPU6050_6AXIS_MOTIONAPPS20_H_ */
// I2C device class (I2Cdev) demonstration Arduino sketch for MPU6050 class, 3D math helper
// 6/5/2012 by Jeff Rowberg <jeff@rowberg.net>
// Updates should (hopefully) always be available at https://github.com/jrowberg/i2cdevlib
//
// Changelog:
// 2012-06-05 - add 3D math helper file to DMP6 example sketch
/* ============================================
I2Cdev device library code is placed under the MIT license
Copyright (c) 2012 Jeff Rowberg
Permission is hereby granted, free of charge, to any person obtaining a copy
of this software and associated documentation files (the "Software"), to deal
in the Software without restriction, including without limitation the rights
to use, copy, modify, merge, publish, distribute, sublicense, and/or sell
copies of the Software, and to permit persons to whom the Software is
furnished to do so, subject to the following conditions:
The above copyright notice and this permission notice shall be included in
all copies or substantial portions of the Software.
THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY,
FITNESS FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE
AUTHORS OR COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER
LIABILITY, WHETHER IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM,
OUT OF OR IN CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN
THE SOFTWARE.
===============================================
*/
#ifndef _HELPER_3DMATH_H_
#define _HELPER_3DMATH_H_
class Quaternion {
public:
float w;
float x;
float y;
float z;
Quaternion() {
w = 1.0f;
x = 0.0f;
y = 0.0f;
z = 0.0f;
}
Quaternion(float nw, float nx, float ny, float nz) {
w = nw;
x = nx;
y = ny;
z = nz;
}
Quaternion getProduct(Quaternion q) {
// Quaternion multiplication is defined by:
// (Q1 * Q2).w = (w1w2 - x1x2 - y1y2 - z1z2)
// (Q1 * Q2).x = (w1x2 + x1w2 + y1z2 - z1y2)
// (Q1 * Q2).y = (w1y2 - x1z2 + y1w2 + z1x2)
// (Q1 * Q2).z = (w1z2 + x1y2 - y1x2 + z1w2
return Quaternion(
w*q.w - x*q.x - y*q.y - z*q.z, // new w
w*q.x + x*q.w + y*q.z - z*q.y, // new x
w*q.y - x*q.z + y*q.w + z*q.x, // new y
w*q.z + x*q.y - y*q.x + z*q.w); // new z
}
Quaternion getConjugate() {
return Quaternion(w, -x, -y, -z);
}
float getMagnitude() {
return sqrt(w*w + x*x + y*y + z*z);
}
void normalize() {
float m = getMagnitude();
w /= m;
x /= m;
y /= m;
z /= m;
}
Quaternion getNormalized() {
Quaternion r(w, x, y, z);
r.normalize();
return r;
}
};
class VectorInt16 {
public:
int16_t x;
int16_t y;
int16_t z;
VectorInt16() {
x = 0;
y = 0;
z = 0;
}
VectorInt16(int16_t nx, int16_t ny, int16_t nz) {
x = nx;
y = ny;
z = nz;
}
float getMagnitude() {
return sqrt(x*x + y*y + z*z);
}
void normalize() {
float m = getMagnitude();
x /= m;
y /= m;
z /= m;
}
VectorInt16 getNormalized() {
VectorInt16 r(x, y, z);
r.normalize();
return r;
}
void rotate(Quaternion *q) {
// http://www.cprogramming.com/tutorial/3d/quaternions.html
// http://www.euclideanspace.com/maths/algebra/realNormedAlgebra/quaternions/transforms/index.htm
// http://content.gpwiki.org/index.php/OpenGL:Tutorials:Using_Quaternions_to_represent_rotation
// ^ or: http://webcache.googleusercontent.com/search?q=cache:xgJAp3bDNhQJ:content.gpwiki.org/index.php/OpenGL:Tutorials:Using_Quaternions_to_represent_rotation&hl=en&gl=us&strip=1
// P_out = q * P_in * conj(q)
// - P_out is the output vector
// - q is the orientation quaternion
// - P_in is the input vector (a*aReal)
// - conj(q) is the conjugate of the orientation quaternion (q=[w,x,y,z], q*=[w,-x,-y,-z])
Quaternion p(0, x, y, z);
// quaternion multiplication: q * p, stored back in p
p = q -> getProduct(p);
// quaternion multiplication: p * conj(q), stored back in p
p = p.getProduct(q -> getConjugate());
// p quaternion is now [0, x', y', z']
x = p.x;
y = p.y;
z = p.z;
}
VectorInt16 getRotated(Quaternion *q) {
VectorInt16 r(x, y, z);
r.rotate(q);
return r;
}
};
class VectorFloat {
public:
float x;
float y;
float z;
VectorFloat() {
x = 0;
y = 0;
z = 0;
}
VectorFloat(float nx, float ny, float nz) {
x = nx;
y = ny;
z = nz;
}
float getMagnitude() {
return sqrt(x*x + y*y + z*z);
}
void normalize() {
float m = getMagnitude();
x /= m;
y /= m;
z /= m;
}
VectorFloat getNormalized() {
VectorFloat r(x, y, z);
r.normalize();
return r;
}
void rotate(Quaternion *q) {
Quaternion p(0, x, y, z);
// quaternion multiplication: q * p, stored back in p
p = q -> getProduct(p);
// quaternion multiplication: p * conj(q), stored back in p
p = p.getProduct(q -> getConjugate());
// p quaternion is now [0, x', y', z']
x = p.x;
y = p.y;
z = p.z;
}
VectorFloat getRotated(Quaternion *q) {
VectorFloat r(x, y, z);
r.rotate(q);
return r;
}
};
#endif /* _HELPER_3DMATH_H_ */




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
_i3tnFRx9D1.png){kind=link}
_349dfgIz1U.png){kind=link}
Comments
Please log in or sign up to comment.