


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Let's make a fully autonomous robot using Arduino and IR sensors. It can explore a table surface without falling. Watch video for more!
Components used:- Piece of cardboard
- Arduino Uno
- IR sensor
- BO motor
- Wheels
- Caster wheel
- L293d IC
- PCB
- Flexible wire
- LED
- 330R resistor
- Battery
- Connecters male/female
- PCB terminal
Take a piece of cardboard of dimension 135mm x120mm. mark all dimensions as per given layout and cut it.
Stick all cut part using hot glue. Stick both motors on their place. Fit wheels to both motors. Place IR sensors in frontside of the robot body. Also fit two LED’s in front side. This LED’s are just for improving the look of robot you can skip this led if not available. Stick caster wheel in back side on bottom of robot body. Now place battery inside it. Keep maxweight in back side of robot. Close the upper side of body by sticking upper pre cut cardboard piece.
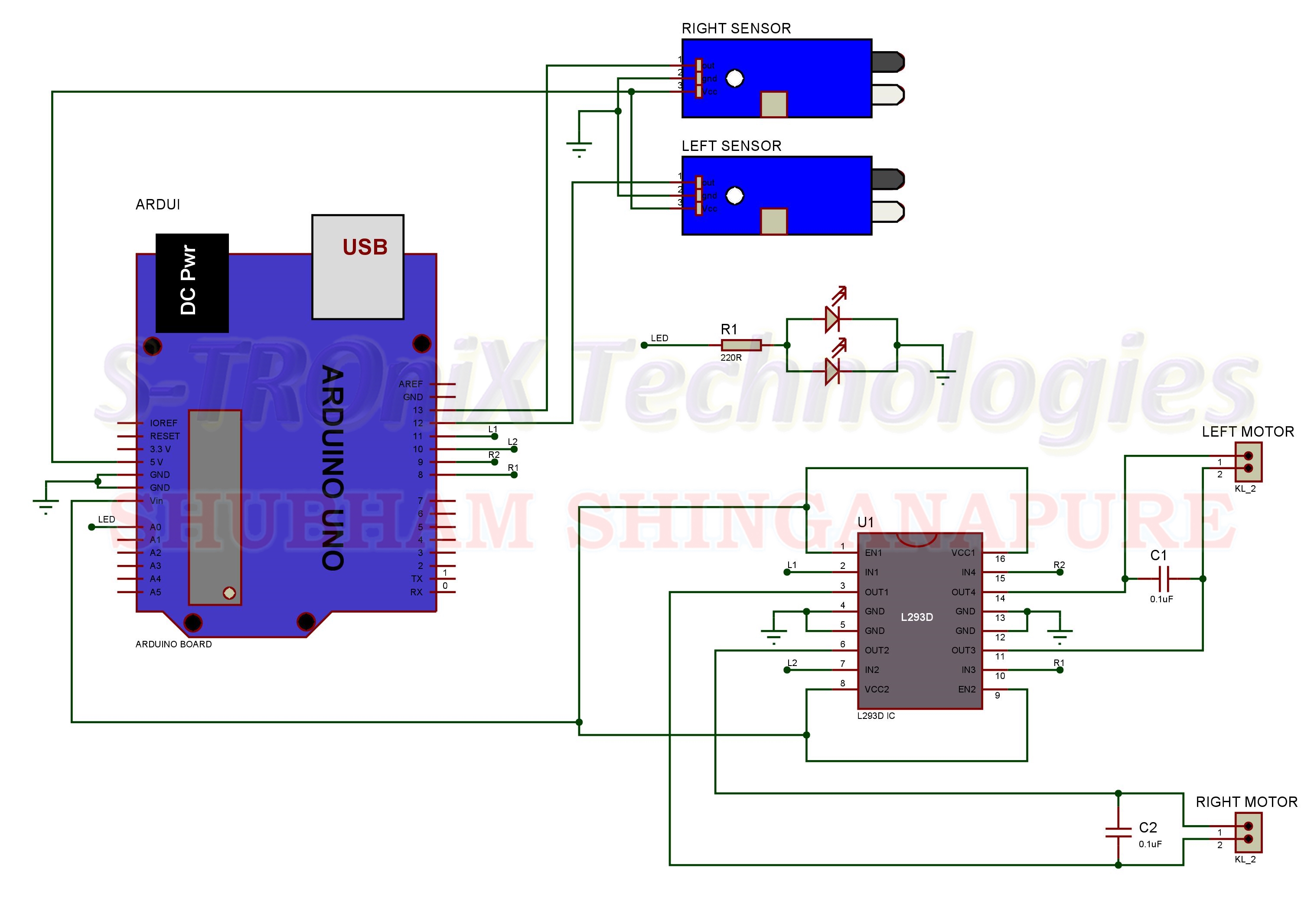
Now take PCB some male female connectors and H-Bridge L293D motor driver IC. Solder all components as per given circuit diagram. Connect both motor to motor driver Board which we recently soldered. Connect both sensors to the board. Now all connections are done.
Let’s upload the
//program by Shubham Shinganapure on 14-06-2019
//
//for Table Edge Avoiding Robot using IR sensors
int lm1=8; //left motor output 1
int lm2=9; //left motor output 2
int rm1=10; //right motor output 1
int rm2=11; //right motor output 2
int sl=13; //sensor 1 input (left)
int sr=12; //sensor 2 input (right)
int SlV=0;
int SrV=0;
int led=A0;
void setup()
{
pinMode(lm1,OUTPUT);
pinMode(lm2,OUTPUT);
pinMode(rm1,OUTPUT);
pinMode(rm2,OUTPUT);
pinMode(led,OUTPUT);
pinMode(sl,INPUT);
pinMode(sr,INPUT);
sTOP();
}
void loop()
{
SlV=digitalRead(sl);
SrV=digitalRead(sr);
if(SrV==LOW && SlV== LOW)
{
digitalWrite(led,LOW);
ForWard();
}
if(SrV==HIGH && SlV== HIGH)
{
digitalWrite(led,HIGH);
BackWard();
delay(400);
Right();
delay(550);
ForWard();
delay(200);
}
if(SrV==LOW && SlV== HIGH)
{
digitalWrite(led,HIGH);
BackWard();
delay(400);
Right();
delay(550);
ForWard();
delay(200);
}
if(SrV==HIGH && SlV== LOW)
{
digitalWrite(led,HIGH);
BackWard();
delay(400);
Left();
delay(550);
ForWard();
delay(200);
}
}
void ForWard()
{
digitalWrite(lm1,HIGH);
digitalWrite(lm2,LOW);
digitalWrite(rm1,HIGH);
digitalWrite(rm2,LOW);
}
void BackWard()
{
digitalWrite(lm1,LOW);
digitalWrite(lm2,HIGH);
digitalWrite(rm1,LOW);
digitalWrite(rm2,HIGH);
}
void Left()
{
digitalWrite(lm1,LOW);
digitalWrite(lm2,HIGH);
digitalWrite(rm1,HIGH);
digitalWrite(rm2,LOW);
}
void Right()
{
digitalWrite(lm1,HIGH);
digitalWrite(lm2,LOW);
digitalWrite(rm1,LOW);
digitalWrite(rm2,HIGH);
}
void sTOP()
{
digitalWrite(lm1,LOW);
digitalWrite(lm2,LOW);
digitalWrite(rm1,LOW);
digitalWrite(rm2,LOW);
}Copy and pest code from here to Arduino IDE, connect Arduino board to your pc. SelectCOM port and board type from tool menu. And click upload.
After uploading program to Arduino, we all done, now let’s test it. Connect battery to Arduino. Here I’m using 2 lithium ion cell connected in series and wrap them together by using insulation tape, so the voltage of this battery is 7.4 volt. you can use 2s 7.4Volt lipo battery. Use supply voltage in between 6 to 9 volt.If you used higher voltage battery the speed of robot is higher and when it comes to edge it instantly apply break i.e. it revers it’s wheel rotation since it moving in higher speed the chance of falling is increases due to it’s forward inertia.
Hope you find this useful. if yes, like it, share it, comment your doubt. For more such projects, follow me! Support my Work and Subscribe to My Channel on YouTube.
Thank you!






{kind=link}
Comments
Please log in or sign up to comment.