



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
I have a Raspberry Pi 4 that I don't use at home...
I was thinking about what to use it for, and I came across a YouTube video.
I was trying to make an RC Tank with Raspberry Pi, but
The YouTube video is controlled using a wireless keyboard, but it is judged that it is difficult to make delicate movements due to the difficulty in speed control.
So I decided to make it with Arduino.
I am trying to make it possible to fine-tune it with Bluetooth & Android app.
1 / 6 • Interior photo
//==========================================================================
// Name : ARDUINO NANO EVERY TANK with BLUETOOTH CONTROL
// Created : 2021-11-15
// Author : Darseon. Park (shunnys@naver.com)
// ---------------------------------------------------------------------------------
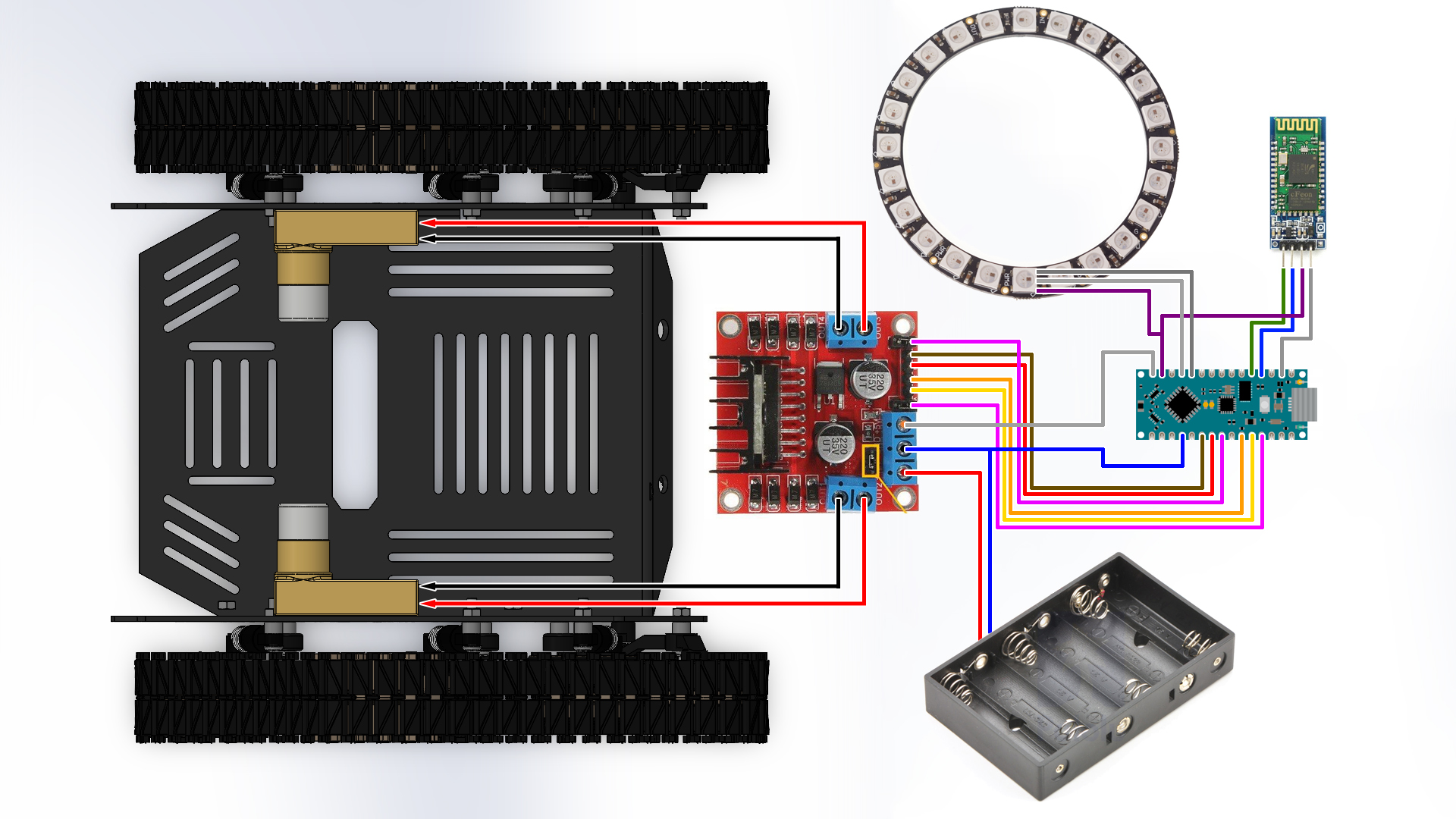
// Arduino Nano Every
// HC-06 Bluetooth Slave
// A2 L298N Motor Driver
//==========================================================================
#include <SoftwareSerial.h>
#include <LiquidCrystal_I2C.h>
#include <Adafruit_NeoPixel.h>
#define ENA 9
#define IN1 8
#define IN2 7
#define ENB 5
#define IN3 4
#define IN4 3
#define BL_TX 14
#define BL_RX 15
#define NEOPIXEL_PIN 21
#define NEOPIXEL_BRIGHT 200
SoftwareSerial bluetooth(BL_TX, BL_RX);
LiquidCrystal_I2C lcd(0x27,20,4);
int right_speed = 0;
int left_speed = 0;
String recv_data = "";
Adafruit_NeoPixel strip = Adafruit_NeoPixel(24, NEOPIXEL_PIN, NEO_GRBW + NEO_KHZ800);
int neo_pixel_position = 0;
int neo_pixel_nextstep = 0;
//==========================================================================
void setup() {
pinMode(ENA, OUTPUT);
pinMode(IN1, OUTPUT);
pinMode(IN2, OUTPUT);
pinMode(ENB, OUTPUT);
pinMode(IN3, OUTPUT);
pinMode(IN4, OUTPUT);
Serial.begin(9600);
bluetooth.begin(9600);
strip.begin();
strip.setBrightness(NEOPIXEL_BRIGHT);
whiteOverRainbow(75, 5);
colorWipe(strip.Color(0, 0, 0), 0);
strip.show();
lcd.init();
lcd.backlight();
lcd.setCursor(0, 0), lcd.print("Program START");
}
//==========================================================================
void loop() {
//AF000R000E0Z
//012345678901
//F000R000E0
//012345678901
recv_data = bluetooth.readStringUntil('*');
if (recv_data.charAt(0) == 'A' && recv_data.charAt(11) == 'Z') {
tankRun();
}
}
void tankRun() {
Serial.println(recv_data);
char recv_leftway = recv_data.charAt(1);
int left_speed = recv_data.substring(2,5).toInt();
char recv_rightway = recv_data.charAt(5);
int right_speed = recv_data.substring(6,9).toInt();
char recv_led = recv_data.charAt(10);
int led_gage = left_speed + right_speed;
analogWrite(ENA, right_speed);
analogWrite(ENB, left_speed);
if (recv_leftway == 'F') {
digitalWrite(IN3, LOW);
digitalWrite(IN4, HIGH);
} else if (recv_leftway == 'R') {
digitalWrite(IN3, HIGH);
digitalWrite(IN4, LOW);
} else {
digitalWrite(IN3, LOW);
digitalWrite(IN4, LOW);
}
if (recv_rightway == 'F') {
digitalWrite(IN1, LOW);
digitalWrite(IN2, HIGH);
} else if (recv_rightway == 'R') {
digitalWrite(IN1, HIGH);
digitalWrite(IN2, LOW);
} else {
digitalWrite(IN1, LOW);
digitalWrite(IN2, LOW);
}
if (recv_led == '1') {
if (led_gage >= 400) {
colorWipe(strip.Color(255, 0, 0), 0);
} else if (led_gage >= 300) {
colorWipe(strip.Color(255, 255, 0), 0);
} else if (led_gage > 0) {
colorWipe(strip.Color(0, 255, 0), 0);
} else {
colorWipe(strip.Color(0, 0, 0), 0);
}
}
}
//==========================================================================
void neo_pixel_normal()
{
if (neo_pixel_position >= 256 * 5) neo_pixel_position = 0;
else neo_pixel_position++;
for (neo_pixel_nextstep = 0; neo_pixel_nextstep < strip.numPixels(); neo_pixel_nextstep++)
{
strip.setPixelColor(neo_pixel_nextstep, Wheel(((neo_pixel_nextstep * 256 / strip.numPixels()) + neo_pixel_position) & 255));
}
strip.show();
}
void disconnect_led()
{
colorWipe(strip.Color(0, 0, 0, 255), 30);
delay(100);
}
void colorWipe(uint32_t c, uint8_t wait)
{
for (uint16_t i = 0; i < strip.numPixels(); i++) {
strip.setPixelColor(i, c);
strip.show();
delay(wait);
}
}
void whiteOverRainbow(int whiteSpeed, int whiteLength)
{
if (whiteLength >= strip.numPixels()) whiteLength = strip.numPixels() - 1;
int head = whiteLength - 1;
int tail = 0;
int loops = 1;
int loopNum = 0;
uint32_t lastTime = millis();
uint32_t firstPixelHue = 0;
for (;;) { // Repeat forever (or until a 'break' or 'return')
for (int i = 0; i < strip.numPixels(); i++) { // For each pixel in strip...
if (((i >= tail) && (i <= head)) || // If between head & tail...
((tail > head) && ((i >= tail) || (i <= head)))) {
strip.setPixelColor(i, strip.Color(0, 0, 0, 255)); // Set white
}
else { // else set rainbow
int pixelHue = firstPixelHue + (i * 65536L / strip.numPixels());
strip.setPixelColor(i, strip.gamma32(strip.ColorHSV(pixelHue)));
}
}
strip.show(); // Update strip with new contents
// There's no delay here, it just runs full-tilt until the timer and
// counter combination below runs out.
firstPixelHue += 40; // Advance just a little along the color wheel
if ((millis() - lastTime) > whiteSpeed) { // Time to update head/tail?
if (++head >= strip.numPixels()) { // Advance head, wrap around
head = 0;
if (++loopNum >= loops) return;
}
if (++tail >= strip.numPixels()) { // Advance tail, wrap around
tail = 0;
}
lastTime = millis(); // Save time of last movement
}
}
}
uint32_t Wheel(byte WheelPos)
{
WheelPos = 255 - WheelPos;
if (WheelPos < 85) {
return strip.Color(255 - WheelPos * 3, 0, WheelPos * 3);
}
if (WheelPos < 170) {
WheelPos -= 85;
return strip.Color(0, WheelPos * 3, 255 - WheelPos * 3);
}
WheelPos -= 170;
return strip.Color(WheelPos * 3, 255 - WheelPos * 3, 0);
}



_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.