
Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
ALL THE INFORMATION IS PROVIDED IN THE VIDEO BELOW...
Below we have provided the link to GitHub Repositories...


Add the following snippet to your HTML:

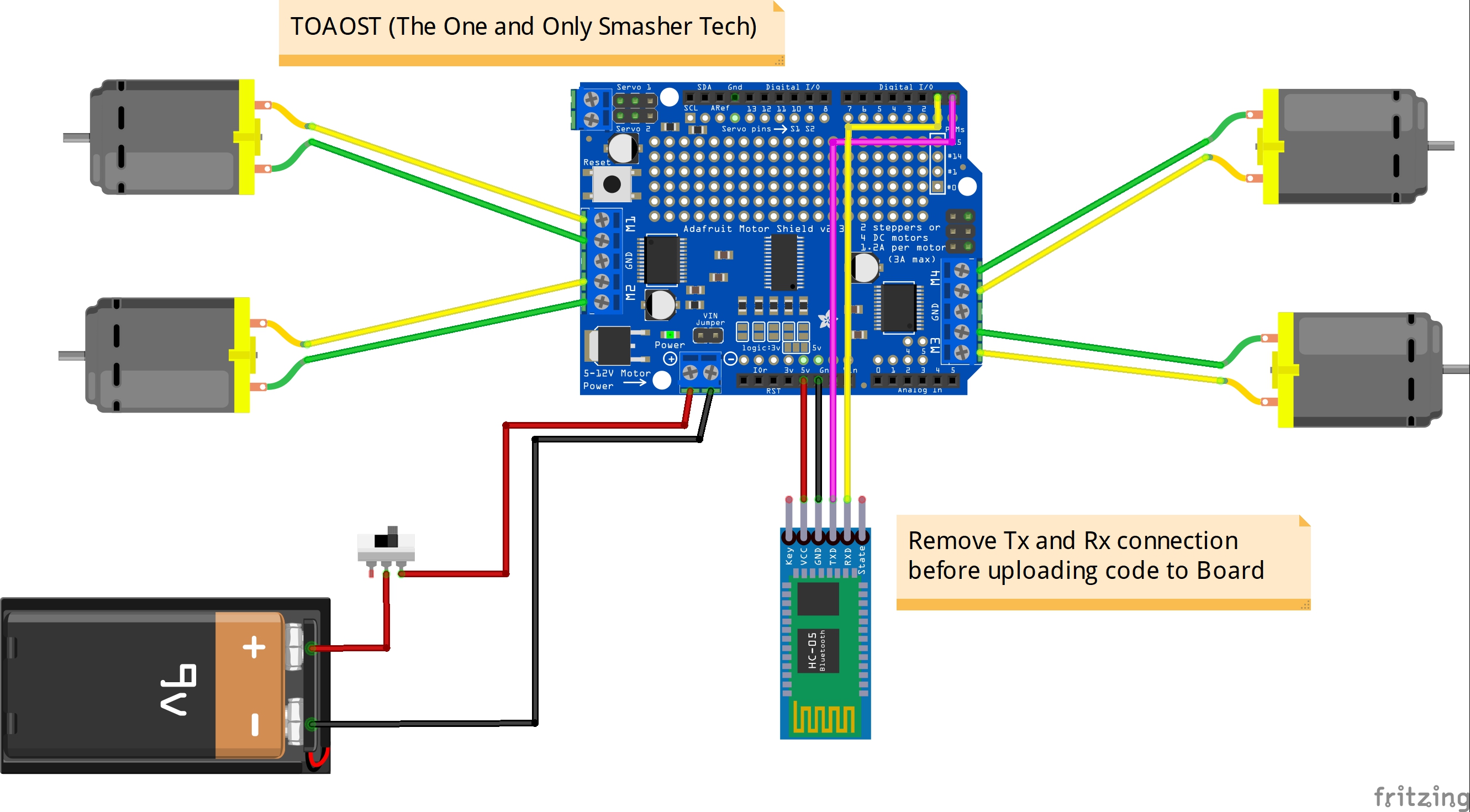
We can control this bot by Bluetooth with a secured connection

Hardware components | ||||||
|
| × | 1 | |||
| × | 1 | ||||
|
| × | 1 | |||
|
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
|
| |||||
|
| |||||
ALL THE INFORMATION IS PROVIDED IN THE VIDEO BELOW...
Below we have provided the link to GitHub Repositories...




{kind=link}
Comments