


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 5 | |||
Software apps and online services | ||||||
 |
| |||||
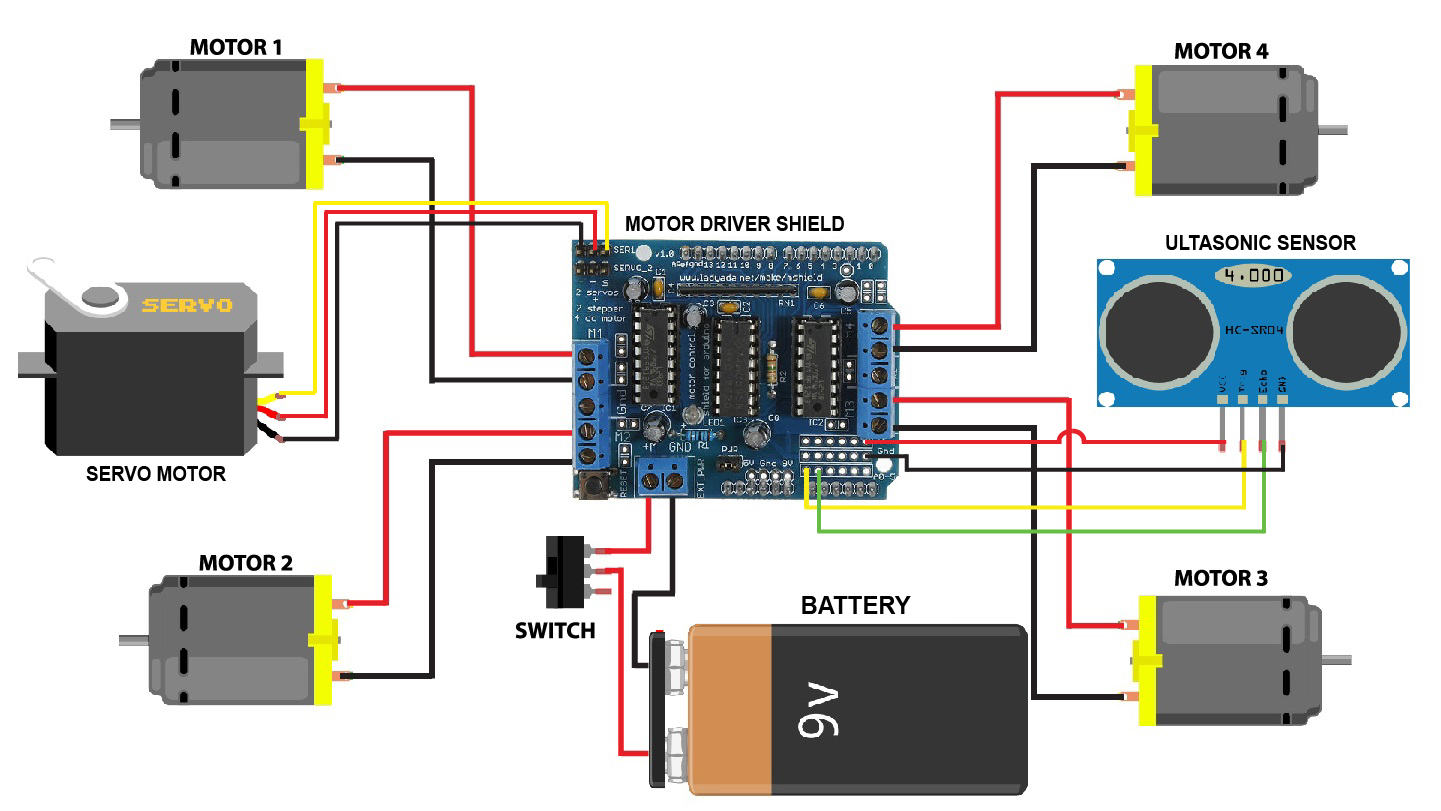
Obstacle detection and avoidance can be considered as the central issue in designing mobile robots. An Obstacle Avoidance Robot is an intelligent robot, which can automatically sense and overcome obstacles on its path. It contains of an Arduino UNO Microcontroller to process the data, and Ultrasonic sensor to detect the obstacles on its path. Without it robot movement would be very restrictive and fragile.



_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.