


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 2 | ||||
Bill of Materials
Read more- PHPoC Blue (P4S-342)
- Ultrasonic sensor (HC-SRO4) X 2
- Bi-color LED (green, red) x 2
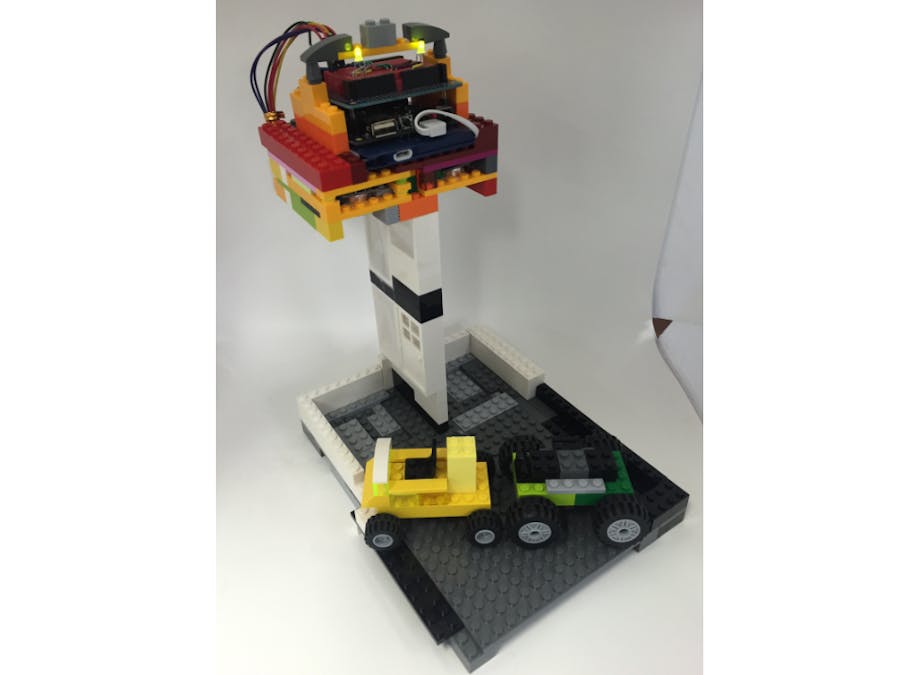
- Lego(Parking lot model, car model)
a. PHPoC Blue measures the distance from the top to the bottom using an Ultrasonic sensor. [HT0~3 port]
b. When your car approaches to the certain point of a parking lot, the LED color automatically changes from green to red. [UIO0~3]
VideoConnection
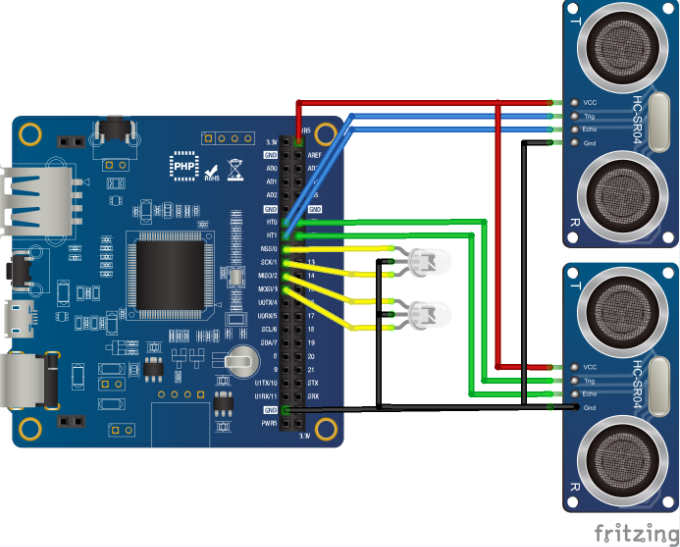
[PHPoC Blue] ----------[Ultrasonic Ranger 1]
PWR5 ---------- VCC
HT0 ---------- Trig
HT1 ---------- Echo
GND ---------- Gnd
[PHPoC Blue] ----------[Ultrasonic Ranger 2]
PWR5 ---------- VCC
HT2 ---------- Trig
HT3 ---------- Echo
GND ---------- Gnd
[PHPoC Blue] ---------- [Bi-color LED 1]
NSS/0 ---------- RED
GND ---------- GND
SCK/1 ---------- GREEN
[PHPoC Blue] ---------- [Bi-color LED 2]
MISO/2 ---------- RED
GND ---------- GND
MOSI/3 ---------- GREEN
PWR5 ---------- VCC
HT0 ---------- Trig
HT1 ---------- Echo
GND ---------- Gnd
[PHPoC Blue] ----------[Ultrasonic Ranger 2]
PWR5 ---------- VCC
HT2 ---------- Trig
HT3 ---------- Echo
GND ---------- Gnd
[PHPoC Blue] ---------- [Bi-color LED 1]
NSS/0 ---------- RED
GND ---------- GND
SCK/1 ---------- GREEN
[PHPoC Blue] ---------- [Bi-color LED 2]
MISO/2 ---------- RED
GND ---------- GND
MOSI/3 ---------- GREEN




{kind=link}
Comments
Please log in or sign up to comment.