


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)
.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)
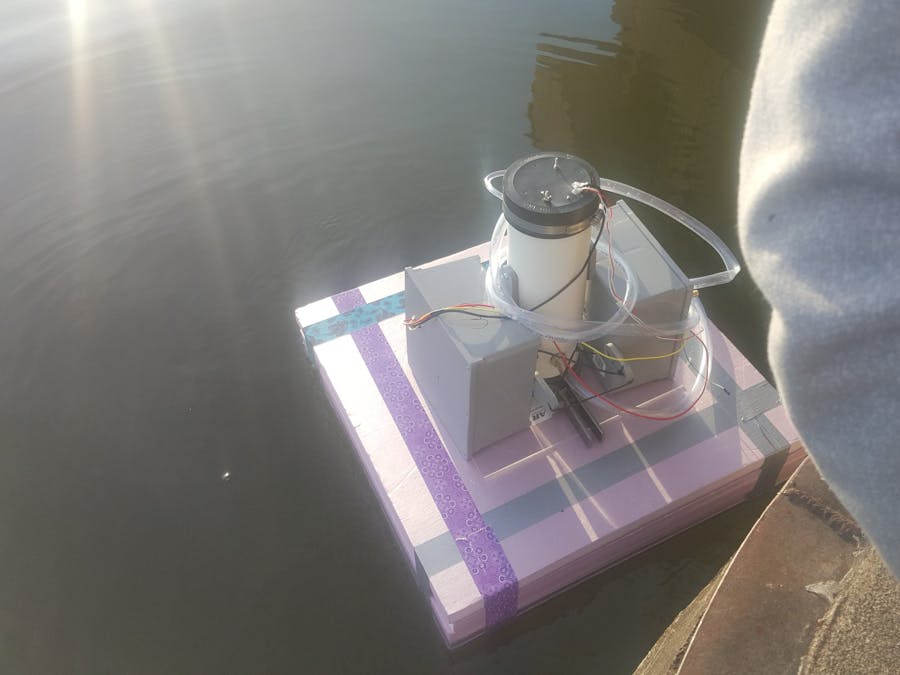
The researchers in UW-Madison Limnology department are having a hard time mesureing CO2 flux data on a regular basis, so they entrusted us to build an automated probe for them.
Briefly speaking, it takes musuremnt of CO2 in a closed chamber for a period of time, clear out the air, and repeat. data are stored in a SD card.
Sensor cap:
Control box (pump, valve, relay, and arduino):
Overall:
sensor cap
File missing, please reupload.
#include <SPI.h>
#include <SD.h>
#include <Wire.h>
#include "Co2Meter_K33.h"
//global variable declarations
Co2Meter_K33 k33;
const int CHIP_SELECT = 4; //CS - pin 4 (for MKRZero SD: SDCARD_SS_PIN)
String logname = "DATA0.txt"; //name of logged data file
//use the blue of an RGB LED to indicate when a measurement cycle is initiated
int ledBlue = 9; // the PWM pin the RGB LED blue is attached to
//use the red of an RGB LED to indicate errors
int ledRed = 3; // the PWM pin the RGB LED red is attached to
//use the greed LED to indicate time between sets
int ledGreen = 10; // the PWM pin the RGB LED green is attached to
int brightness = 100; // how bright the RGB LED blue, green, and red will be
//establish delays and number of measurements
int measurementWait = 1500; // number of milliseconds to wait between measurements within a set
int setToSetWait = 10000; // number of milliseconds to wait between each set, within a set many measurements are taken
int measurementTake = 3; // number of measurements to take per set, don't exceed setToSetWait time
String dataString = ""; // make a string for assembling the data to log:
double co2 = 0; // holds co2 measurement taken from K33 sensor
double temp = 0; // holds temperature measurement taken from K33 sensor
double relTime = 0; // holds the time, relative to how long the Arduino has been powered on
//relay, pump, and ball valve variables
int prelay = 4; //define output pin for pre-relay
int bvalve = 5; //define output pin for the ball valve
int pump = 6; //define output pin for the pump
//In this example we will do a basic read of the CO2 value and checksum verification.
//For more advanced applications please see the I2C Comm guide.
void setup() {
Wire.begin();
Serial.begin(4800); //start a serial port to communicate with the computer
Serial.println("What a wonderful day, to read atmospheric CO2 concentrations!");
pinMode(ledRed, OUTPUT); //declare red LED as an output
pinMode(ledGreen, OUTPUT); //declare red LED as an output
pinMode(ledBlue, OUTPUT); //declare blue LED as an output
pinMode(bvalve,OUTPUT); //declare bvalve as an output
pinMode(pump,OUTPUT);
pinMode(prelay,OUTPUT);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
Serial.print("Initializing SD card...");
// see if the card is present and can be initialized:
if (!SD.begin(CHIP_SELECT)) {
Serial.println("Card failed, or not present");
analogWrite(ledRed, brightness); // display error - LED Red
// don't do anything more:
while (1);
}
Serial.println("card initialized.");
//find a filename that doesn't already exist
String base = "DATA"; //base name of the log file
String extension = ".txt"; //extension of the log file
int iteration = 1; //a counter for which number the log file should be
while (SD.exists(logname)) { // keep searching until we find a "logname" which won't overwrite an existing file
++iteration;
logname = base + iteration + extension;
Serial.println(logname); // print "logname"s for debugging purposes
}
// record the data text header to a file on the SD card
// open the file. note that only one file can be open at a time,
// so you have to close this one before opening another.
File dataFile = SD.open(logname, FILE_WRITE);
// if the file is available, write to it:
if (dataFile) {
dataFile.println("CO2(ppm),Temp(C),RelH(%)");
dataFile.close();
}
// if the file isn't open, pop up an error:
else {
Serial.println("error opening: " + logname);
analogWrite(ledRed, brightness);
}
//ensure ball valve is open
openBValve();
}
/*
* co2 should be measured every few hours, this defines a "set"
* within this "set" many measurements should be taken
* after the measurments have been taken in relatively quick succession,
* wait until next set to take more measurements
*/
void loop() {
pumpRunThenStop(); // clear out the air
closeBValve(); // seal air inside the tube
for (int numMeasures = 0; numMeasures < 4; ++numMeasures) { // take specified number of measurements within the set
// We keep the sample period >25s or so, else the sensor will start ignoring sample requests.
analogWrite(ledBlue, brightness); //light blue LED while taking measurments
Serial.println("Initializing sensor (20sec)...");
k33.initPoll();
//wait for sensor to warmup, "i" designates number of seconds to wait
for (int i = 20; i > 0; --i) {
Serial.print("" + String(i) + "..");
delay(1000);
}
Serial.println(); //print a new line for visual appeal
double tempValue = k33.readTemp();
delay(20);
double rhValue = k33.readRh();
delay(20);
double co2Value = k33.readCo2();
relTime = millis();
dataString = "" + String(co2Value) + "," + String(tempValue) + "," + String(rhValue) + "," + String(relTime); //string that prints to file
analogWrite(ledBlue, 0); //turn off blue LED when measurement ends
// record the measurement to a file on the SD card
// open the file. note that only one file can be open at a time,
// so you have to close this one before opening another.
File dataFile = SD.open(logname, FILE_WRITE);
// if the file is available, write to it:
if (dataFile) {
dataFile.println(dataString);
dataFile.close();
// print to the serial port too:
Serial.println(dataString);
}
// if the file isn't open, pop up an error:
else {
Serial.println("error opening: " + logname);
analogWrite(ledRed, brightness);
}
if (co2Value >= 0) {
Serial.print("CO2: ");
Serial.print(co2Value);
Serial.print("ppm Temp: ");
Serial.print(tempValue);
Serial.print("C Rh: ");
Serial.print(rhValue);
Serial.println("%");
}
else {
Serial.println("Checksum failed / Communication failure");
delay(9000);
}
}
// here's the wait in between sets
analogWrite(ledGreen, brightness); // show green LED in bewteen sets
openBValve();
delay(setToSetWait); // this is the amount of time to wait between sets
analogWrite(ledGreen, 0); // show green LED in bewteen sets
}
///////////////////////////////////////////////////////////////////
// Function : void openBValve()
// Executes : opens the ball valve attached to a relay
/////////////////////////////////////////////////////////////////
void openBValve() {
//open the ball valve
digitalWrite(prelay, LOW); // closes the relay "prelay" to feed power into relay "bvalve"
// since the close pin of the bvalve is attached to normally close,
// this action will make sure the bvalve is closed
delay(4000); // wait 3 seconds before opeing ball valve, in case the ball valve was open when
// Arduino is first started this time is allotted to physiccally let the ball
// valve close
digitalWrite(bvalve, LOW); // closes the relay "bvalve" and opens the ball valve
delay(4000); // wait for valve to open
digitalWrite(prelay, HIGH); // opens the relay "prelay" which cuts power from the relay "bvalve"
// therefore leaving the bvalve in an open state w/o consuming extra power
}
///////////////////////////////////////////////////////////////////
// Function : void closeBValve()
// Executes : closes the ball valve attached to a relay
/////////////////////////////////////////////////////////////////
void closeBValve() {
//close the ball valve
digitalWrite(prelay, LOW); // closes the relay "prelay" to feed power into relay "bvalve"
delay(4000); // wait 4 seconds before opeing ball valve, in case the ball valve was open/close already
digitalWrite(bvalve, HIGH); // opens the relay "bvalve" and closes the ball valve
delay(4000); // wait for valve to open
digitalWrite(prelay, HIGH); // opens the relay "prelay" which cuts power from the relay "bvalve"
// therefore leaving the bvalve in a closed state w/o consuming extra power
}
///////////////////////////////////////////////////////////////////
// Function : void pumpRunThenStop()
// Executes : closes the ball valve attached to a relay
/////////////////////////////////////////////////////////////////
void pumpRunThenStop() {
digitalWrite(pump, LOW); // closes relay "pump" to run the pump
delay(5000); // waits for the pump to run, which ensures the device is working
digitalWrite(pump, HIGH); // opens the relay "pump" which turns off the pump
}
// CO2 Meter Kseries Example Interface
// by Andrew Robinson, CO2 Meter <co2meter.com>
// Talks via I2C to K33ELG/BLG Sensors for HostInitiated Data Collection
// 4.1.2011
//Modified into Arduio Library by Kina Smith <kinasmith.com>
//06.09.2016
#include <inttypes.h>
#include <Wire.h>
#include "Arduino.h"
#include "Co2Meter_K33.h"
//int devAddr = 0x68; // This is the default address of the CO2 sensor, 7bits shifted left.
// int devAddr = 0x7F; // This is the broadcast address. There is conflicting addresses with the DS1307 RTC
Co2Meter_K33::Co2Meter_K33() {
devAddr = K33_BLG_ELG_ADDRESS;
}
Co2Meter_K33::Co2Meter_K33(uint8_t address) {
devAddr = address;
}
Co2Meter_K33::~Co2Meter_K33(){}
///////////////////////////////////////////////////////////////////
// Function : void wakeSensor()
// Executes : Sends wakeup commands to K33 sensors.
// Note : THIS COMMAND MUST BE MODIFIED FOR THE SPECIFIC AVR YOU ARE USING
// THE REGISTERS ARE HARDCODED
/////////////////////////////////////////////////////////////////
void Co2Meter_K33::wakeSensor() {
// This command serves as a wakeup to the CO2 sensor, for K33ELG/BLG Sensors Only
// You'll have the look up the registers for your specific device, but the idea here is simple:
// 1. Disabled the I2C engine on the AVR
// 2. Set the Data Direction register to output on the SDA line
// 3. Toggle the line low for ~1ms to wake the micro up. Enable I2C Engine
// 4. Wake a millisecond.
TWCR &= ~(1 << 2); // Disable I2C Engine
DDRC |= (1 << 4); // Set pin to output mode
PORTC &= ~(1 << 4); // Pull pin low
delay(1);
PORTC |= (1 << 4); // Pull pin high again
TWCR |= (1 << 2); // I2C is now enabled
delay(1);
}
//////////////////////////////////////////////////////////////////
// Function : void initPoll()
// Executes : Tells sensor to take a measurement.
// Notes
//
// ///////////////////////////////////////////////////////////////////
void Co2Meter_K33::initPoll() {
wakeSensor();
Wire.beginTransmission(devAddr);
Wire.write(0x11);
Wire.write(0x00);
Wire.write(0x60);
Wire.write(0x35);
Wire.write(0xA6);
Wire.endTransmission();
delay(20);
Wire.requestFrom(devAddr, 2);
byte i = 0;
byte buffer[2] = {0, 0};
while (Wire.available()) {
buffer[i] = Wire.read();
i++;
}
}
///////////////////////////////////////////////////////////////////
// Function : double readCo2()
// Returns : The current CO2 Value, -1 if error has occured
///////////////////////////////////////////////////////////////////
double Co2Meter_K33::readCo2() {
wakeSensor();
int co2_value = 0;
// We will store the CO2 value inside this variable. digitalWrite(13, HIGH);
// On most Arduino platforms this pin is used as an indicator light.
//////////////////////////
/* Begin Write Sequence */
//////////////////////////
Wire.beginTransmission(devAddr);
Wire.write(0x22);
Wire.write(0x00);
Wire.write(0x08);
Wire.write(0x2A);
Wire.endTransmission();
/*
We wait 10ms for the sensor to process our command.
The sensors's primary duties are to accurately
measure CO2 values. Waiting 10ms will ensure the
data is properly written to RAM
*/
delay(20);
/////////////////////////
/* Begin Read Sequence */
/////////////////////////
/*
Since we requested 2 bytes from the sensor we must
read in 4 bytes. This includes the payload, checksum,
and command status byte.
*/
Wire.requestFrom(devAddr, 4);
byte i = 0;
byte buffer[4] = {0, 0, 0, 0};
/*
Wire.available() is not nessessary.
Implementation is obscure but we leave it in here for portability and to future proof our code
*/
while (Wire.available()) {
buffer[i] = Wire.read();
i++;
}
co2_value = 0;
co2_value |= buffer[1] & 0xFF;
co2_value = co2_value << 8;
co2_value |= buffer[2] & 0xFF;
byte sum = 0;
sum = buffer[0] + buffer[1] + buffer[2];
if (sum == buffer[3]) {
// Success!
// digitalWrite(13, LOW);
//Checksum Byte
//Byte addition utilizes overflow
return ((double) co2_value / (double) 1);
}
else {
// Failure!
/*
Checksum failure can be due to a number of factors,
fuzzy electrons, sensor busy, etc.
*/
// digitalWrite(13, LOW);
return (double) -1;
}
}
///////////////////////////////////////////////////////////////////
// Function : double readTemp()
// Returns : The current Temperture Value, -1 if error has occured
///////////////////////////////////////////////////////////////////
double Co2Meter_K33::readTemp() {
wakeSensor();
int tempVal = 0;
// digitalWrite(13, HIGH);
Wire.beginTransmission(devAddr);
Wire.write(0x22);
Wire.write(0x00);
Wire.write(0x12);
Wire.write(0x34);
Wire.endTransmission();
delay(20);
Wire.requestFrom(devAddr, 4);
byte i = 0;
byte buffer[4] = {0, 0, 0, 0};
while (Wire.available()) {
buffer[i] = Wire.read();
i++;
}
tempVal = 0;
tempVal |= buffer[1] & 0xFF;
tempVal = tempVal << 8;
tempVal |= buffer[2] & 0xFF;
byte sum = 0;
sum = buffer[0] + buffer[1] + buffer[2];
//Checksum Byte
//Byte addition utilizes overflow
if (sum == buffer[3]) {
// digitalWrite(13, LOW);
return ((double) tempVal / (double) 100);
}
else {
// digitalWrite(13, LOW);
return -1;
}
}
///////////////////////////////////////////////////////////////////
// Function : double readRh()
// Returns : The current Rh Value, -1 if error has occured
///////////////////////////////////////////////////////////////////
double Co2Meter_K33::readRh() {
wakeSensor();
int tempVal = 0;
// digitalWrite(13, HIGH);
Wire.beginTransmission(devAddr);
Wire.write(0x22);
Wire.write(0x00);
Wire.write(0x14);
Wire.write(0x36);
Wire.endTransmission();
delay(20);
Wire.requestFrom(devAddr, 4);
byte i = 0;
byte buffer[4] = {0, 0, 0, 0};
while (Wire.available()) {
buffer[i] = Wire.read();
i++;
}
tempVal = 0;
tempVal |= buffer[1] & 0xFF;
tempVal = tempVal << 8;
tempVal |= buffer[2] & 0xFF;
byte sum = 0;
sum = buffer[0] + buffer[1] + buffer[2];
//Checksum Byte
//Byte addition utilizes overflow
if (sum == buffer[3]) {
// digitalWrite(13, LOW);
return (double) tempVal / (double) 100;
}
else {
// digitalWrite(13, LOW);
return -1;
}
}
// CO2 Meter Kseries Example Interface
// by Andrew Robinson, CO2 Meter <co2meter.com>
// Talks via I2C to K33ELG/BLG Sensors for HostInitiated Data Collection
// 4.1.2011
//Modified into Arduio Library by Kina Smith <kinasmith.com>
//06.09.2016
#ifndef Co2Meter_K33_H
#define Co2Meter_K33_H
#ifdef ARDUINO
#if ARDUINO < 100
#include "WProgram.h"
#else
#include "Arduino.h"
#endif
#else
#include "ArduinoWrapper.h"
#endif
#include <Wire.h>
#define K33_BLG_ELG_ADDRESS 0x7F
class Co2Meter_K33
{
public:
Co2Meter_K33();
Co2Meter_K33(uint8_t address);
~Co2Meter_K33();
void wakeSensor();
void initPoll();
double readCo2();
double readTemp();
double readRh();
private:
int devAddr;
int co2_value;
int tempVal;
};
#endif

Thanks to Calvin Handerson, Galen Giese, Max Roth, Xuejian (Marvin) Zhang, and Yu Dong.

Comments
Please log in or sign up to comment.