



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
| ||||||
Today I am going to Show you how to make a Smart Obstacle Avoiding CAR which can find its way own ITS own
For making this you need 11 components listed above
I am going to describe each and every step using colorful pictures
So, I don't want to write a big article on it so lets start with the first step
- STEP1 - Place all the components on your working table i.e
TT Geared Motors
Arduino UNO
Breadboard(Half size or Full size)
HC-SR04 Ultrasonic Sensor
L298N Motor Driver
Acrylic Sheet/Cardboard
Set of JUMPER WIRES
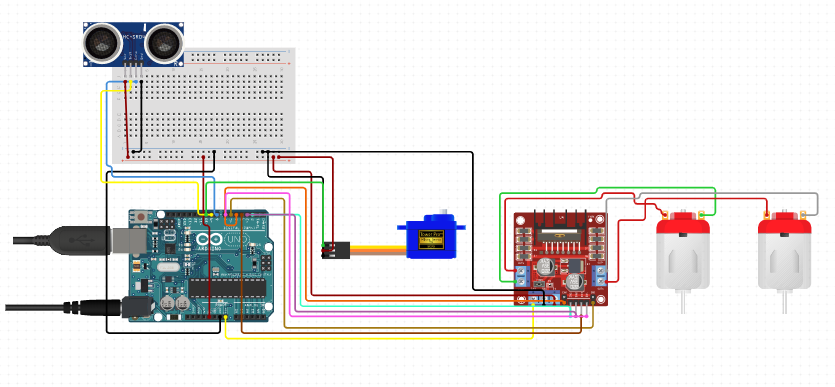
STEP2 - First you need to give the GND and 5v to the breadboard so that every components can access that beacuase arduino has only 1 5v pin so we use the BUS Line of breadboard to connect Arduino UNO with Breadboard as shown below
GND of Arduino ------> Breadboard
5v of Arduino --------> Breadboard
Step 3 - Place the HC-SR04 Ultrasonic Sensor on breadboard and 9G micro servo and make the connection as following (take help of the schematics)
"HC-SR04 Connections"
VCC ------> Breadboard (refer to schematics)
Trig pin ------> 3 digital pin of Arduino
Echo pin -------> 4 digital pin of Arduino
GND ------> Breadboard (refer to schematics)
"9G MICRO SERVO connection"
VIN -------> Breadboard (refer to schematics)
SIG ------> 5 DIGITAL PIN OF ARDUINO
GND --------> Breadboard (refer to schematics)
Step 4 Connect the L298N with the motors (see diagram below)
Step 5 Finally Connect L298N with the arduino (see schematic below)
IMPORTANT: INSTALL NEW PING LIBRARY FIRST IN ARDUINO SOFTWARE THEN UPLOAD THE CODE
PLEASE FOLLOW ME

_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.