



Hardware components | ||||||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
| ||||||
| ||||||
We were tasked to design a solution to fight COVID-19 and safeguard our society. We now have 2 objectives, to fight COVID-19 and protect the people of Singapore (our society).
We, as a team, prepared to brainstorm ideas and took references to our previous projects we have done. We knew we wanted to create something unique and outstanding.
We decided on a sanitizing bot. Why? Well because we wanted to do something relatively complex but still manageable enough as a team.
We chose this as our project because we wanted to make sure surfaces are clean every time to reduce the risk of getting infected most commonly through contact and do reduce the risk involved with manual cleaning of such highly used surfaces.
Another small easteregg, we call it Q-bot as it's similar to cute-bot, well also because it uses QR. But only You Jie knows the real answer.How did we make the Q-bot?
There are 2 parts to the making of the Bot itself.
Making of the Brains of the Q-BOT
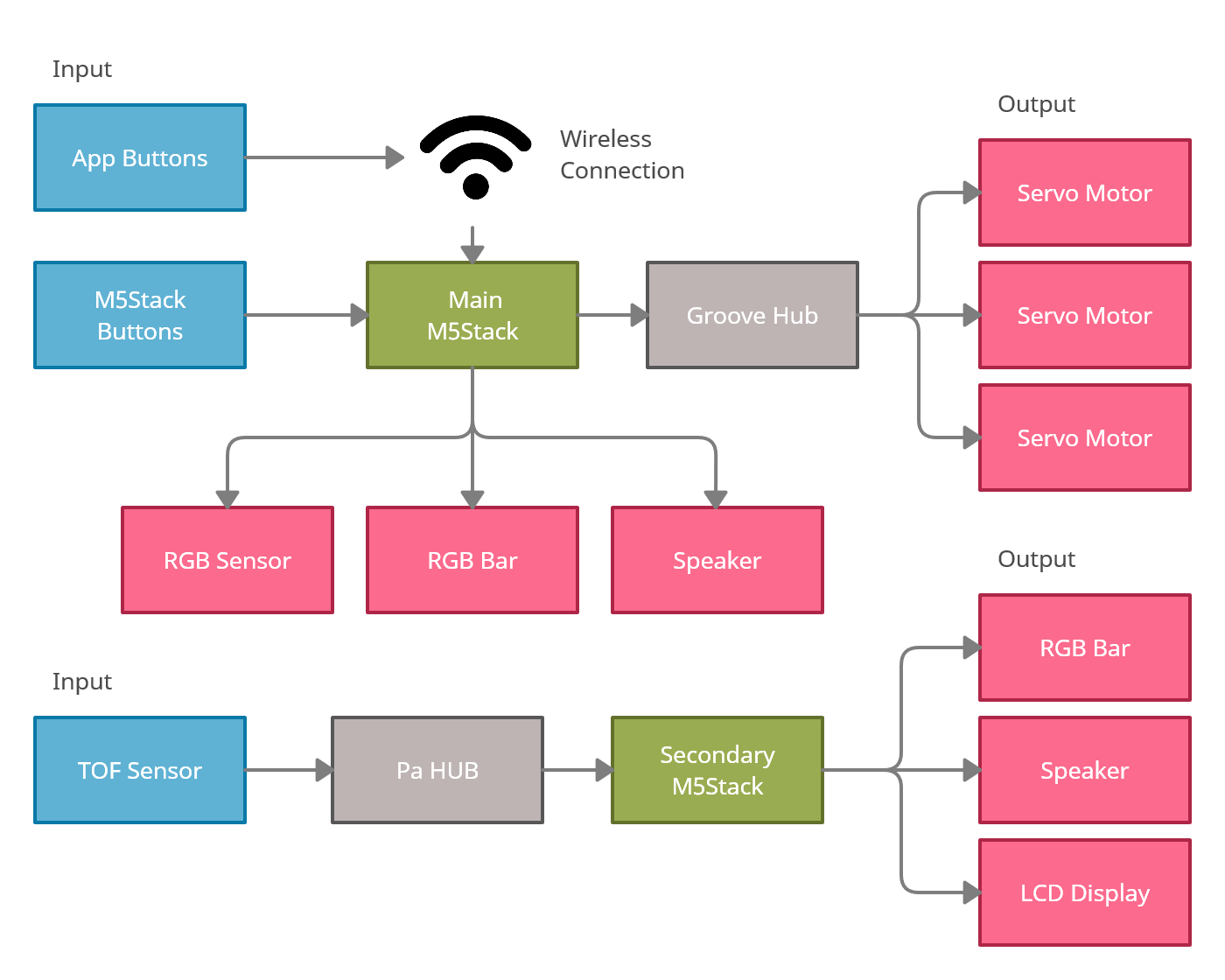
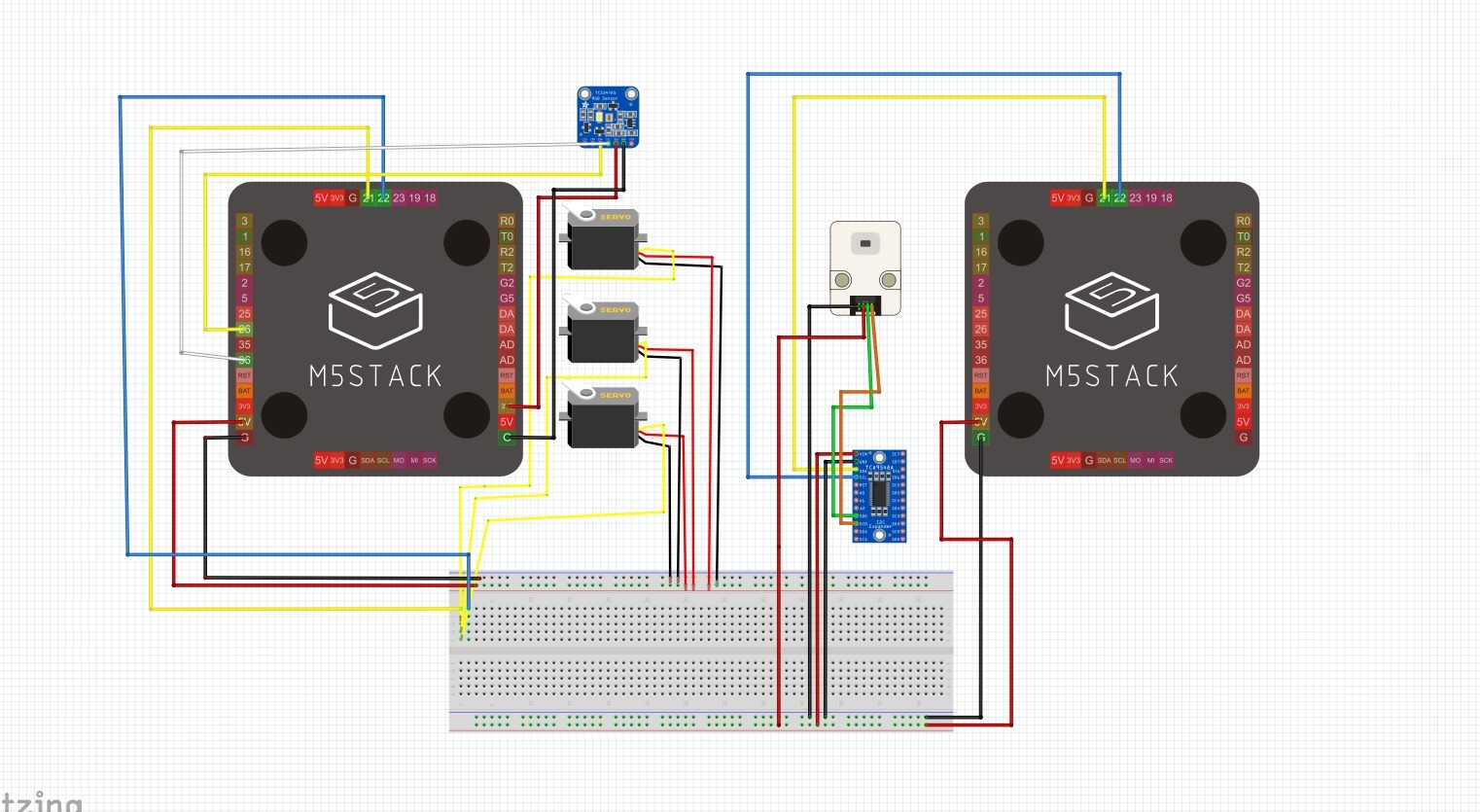
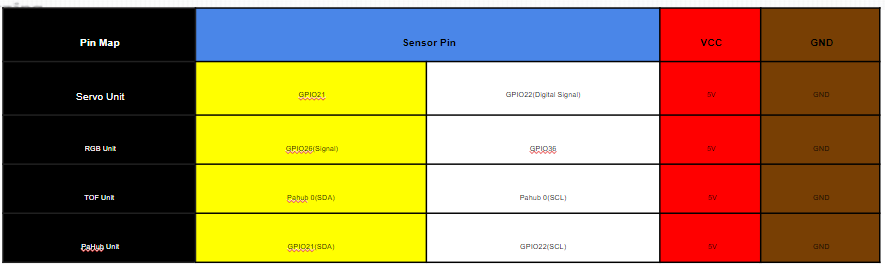
1. Connect all three servo motors to the hub
2. Connect the hub to port A
3. Program the brains of the Q-Bot using either blocky or python
4. Download the code to the M5stack (Main)
Making of the Face of the Q-BOT
1. Connect the TOF to the PAHUB
2. Connect the PAHUB to port A of the secondary M5stack
3. Program the face of the Q-Bot using either blocky or python
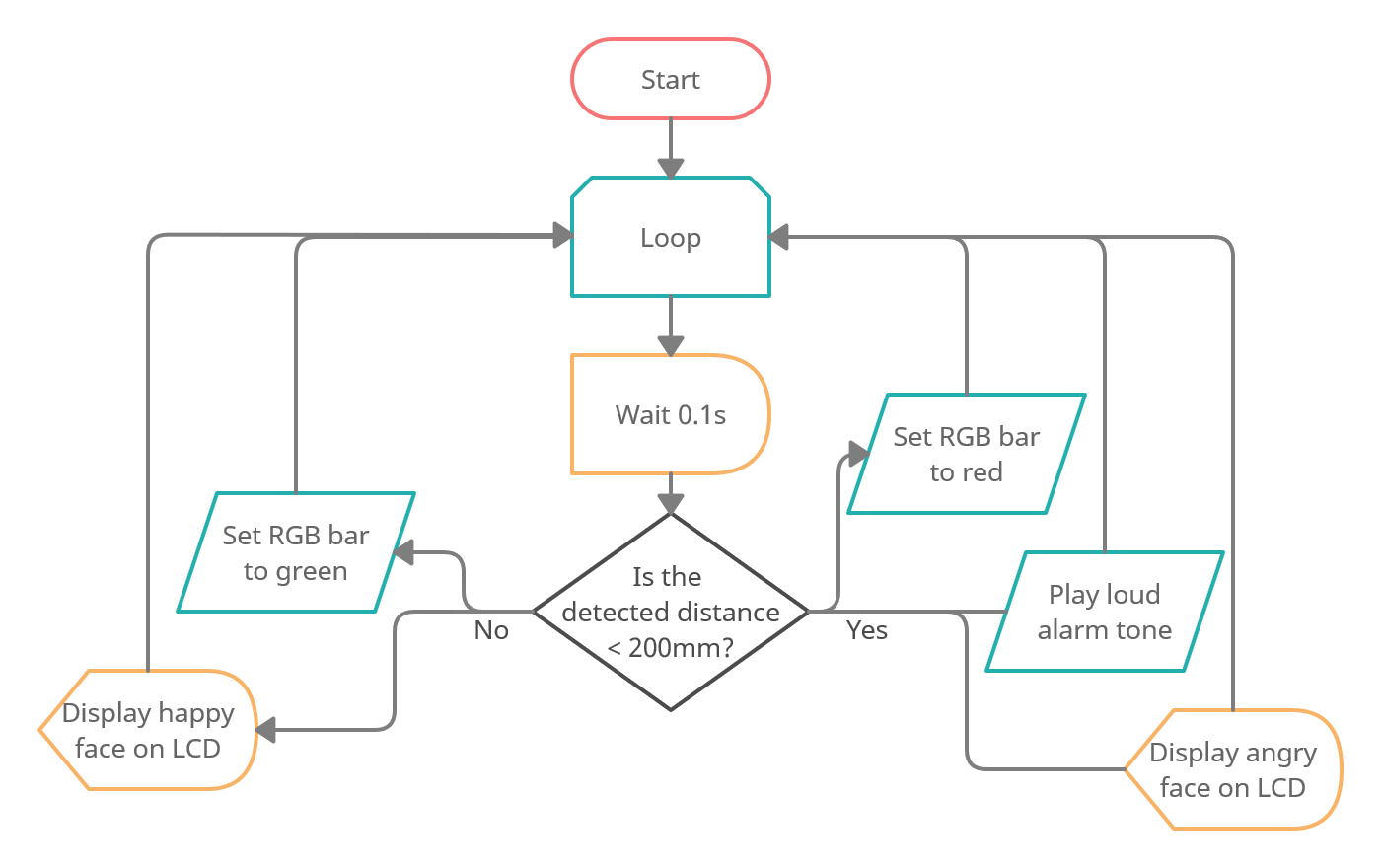
4. Display a happy face if nobody is in the way of Q-Bot
5. Display an angry face if someone is in the way of Q-Bot
6. Download the code to the M5stack (Secondary)
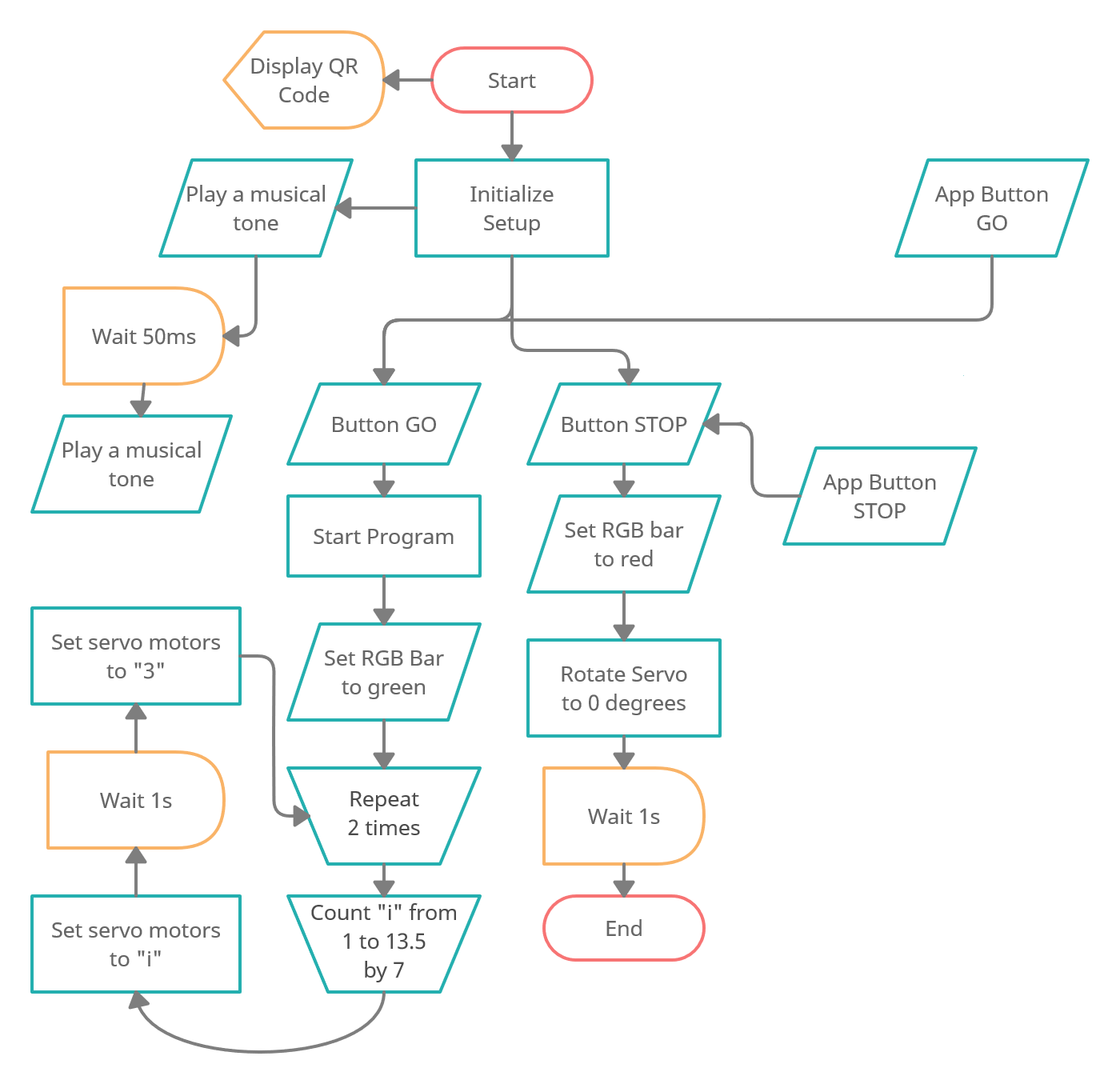
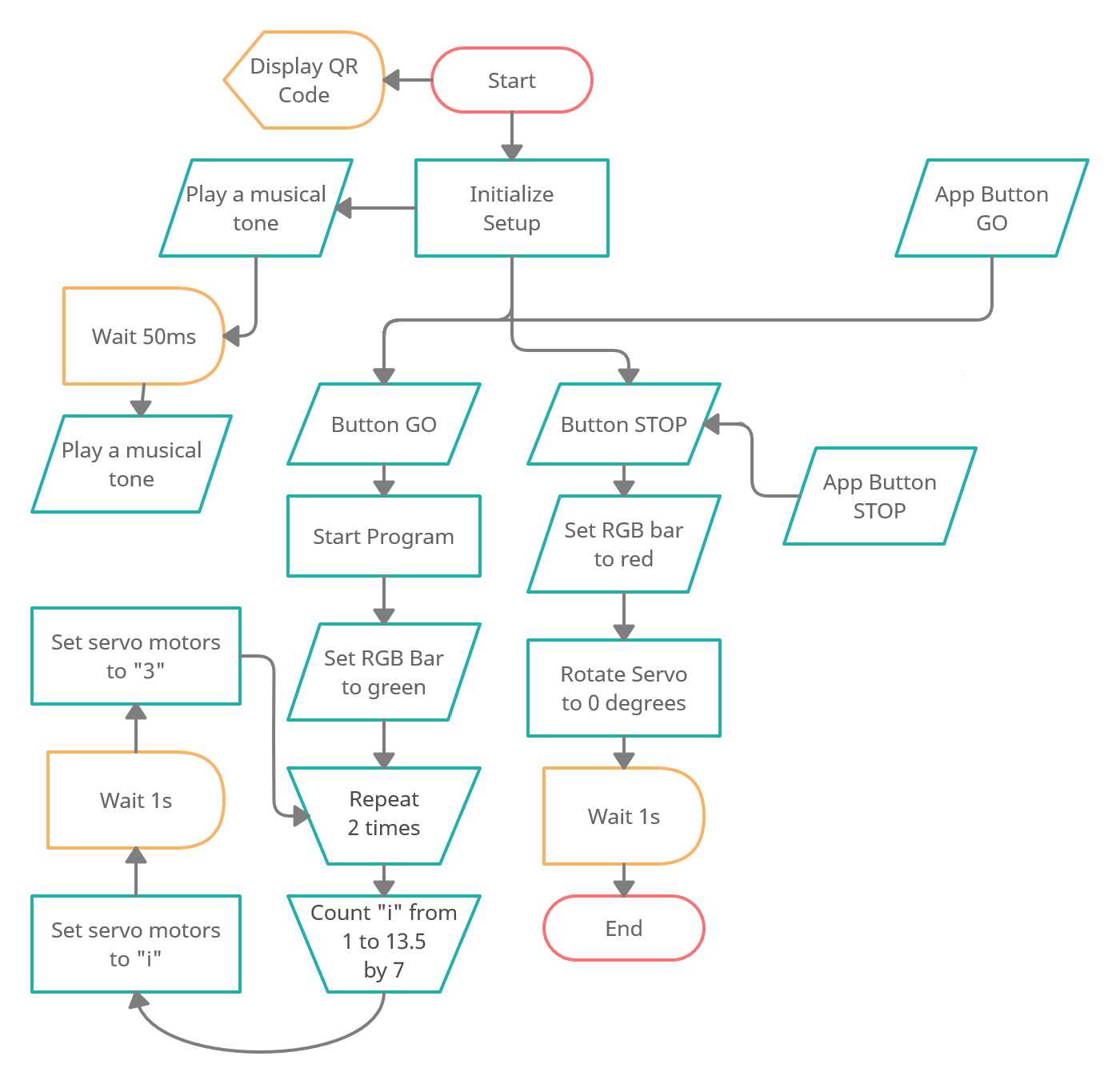
How does the Q-bot work?Main M5StackUsing either the app or the QR-code, it will allow the user to start the Q-bot to clean or not by having a stop and go. If the user press go, the robot will light up green on the m5stack and RGB and will then start to clean the table sanitizing it and then return to its original position. If the user wishes to stop the bot while the Q-Bot is cleaning, the bot would then stop showing a red light on the main m5stack and return to its original position and having the RGB red.
How do we connect to the main WIFi?By programming the QR-code blocky in UIFLOW IDE, the m5stack will be able to connect to the wifi with the help of a nearby hotspot. The reason for doing this is because it is not convenient to keep on pressing the button of the Q-Bot physically. Compared to using QR-code or the app, the user will be able to start the process of sanitization while they're on their way heading out.
Secondary M5StackThere will be a TOF sensor facing the forward and sense if there is anything in its general direction. If there is, the face will change to an angry face and sound the m5stack alarm to inform the user that it's currently cleaning. Once the person notices and steps back, the TOF sensor will sense it and hence stop the alarm and change its angry face to a smiley face.
Why we created a CAD design?The reason for making a CAD design is to further understand and know how our prototype would look like before we make it. That way, the process of building it will be smoother and quicker as we understand where each of the components is.
Why we created an App for the Q-Bot?The reason for creating a simple app for the Q-Bot is to make it more efficient and faster for the user to start and stop the Q-Bot. It is also to make it more convenient for the user as they will then not be needed to keep on scanning the robot's QR-Code and instead with just a simple download, they will then be able to just start and go without any delay.
Problems we faced during this project1. Time management: Time was a huge problem during this project as we were tasked to finish the project within 3 week and due to Chinese New Year, we were only left with 2 weeks to finish the project. Hence we needed to meet up together at a certain time by ourselves to continue and finish the project in time
2. Insufficient materials: Another problem we face was the lack of materials as we did not have the necessary items needed for the project and sometimes needed to buy some of our own items to fulfil our project's requirements.
3. The spraymechanism: The spray unfortunately doesn't work as we intended it to be as we needed a stronger servo to allow the spray to be fully actuated. The spray does indeed spray but only a modest amount and due to the time constraints, we were unable to successfully change or fix the Q-Bot Spray and hence needed to stick to the current short distance spray.
4. Theservo motors: Although the servo worked fine and well, we initially wanted it to move forward continuously. However, the servo has a limit to how much it could turn and we either had to decide to buy another servo or modify the existing servo with the risk of breaking it. Also due to the time constraints, we decided to improvise and make the robot instead spray from a 180-degree angle which is able to cover a squared single table (eg. Hawker centre table).
What we have learned from this1. We have learned that time management is very important and it is needed to plan out what to do ahead of time to know what to do when the team meets.
2. We have to do thorough research on the things we buy so we can understand the limitations of what our product can or cannot do.
3. Through this module, we also understand how an m5stack work and how useful it can be with all its features.
Q-Bot Secondary M5(For TOF M5Stack)


_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.