#include <SoftwareSerial.h>
#include <TinyGPS.h>
#include "ThingSpeak.h"
#include <DallasTemperature.h>
#include <dht.h>
byte mac[] = { 0xDE, 0xAD, 0xBE, 0xEF, 0xFE, 0xED}; EthernetClient client;
DallasTemperature sensors(&oneWire);
dht DHT;
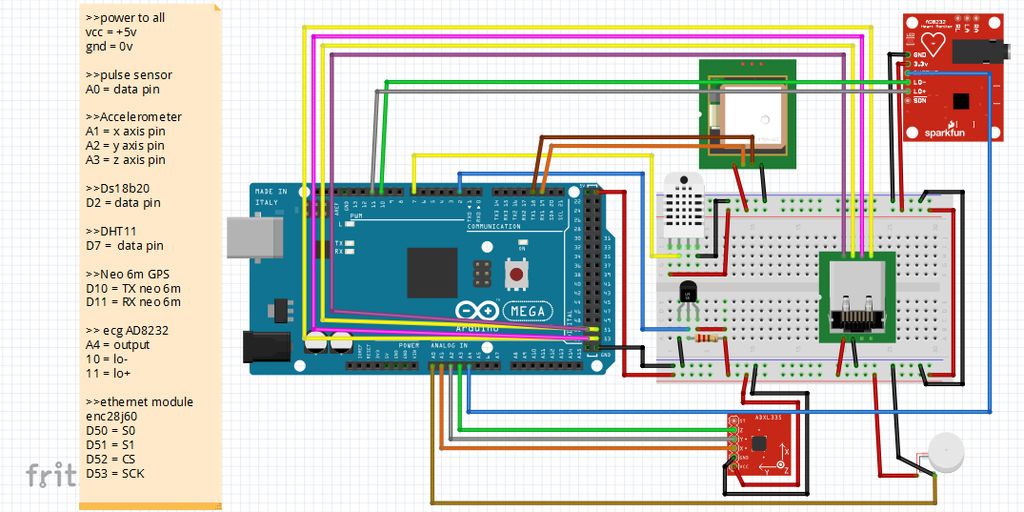
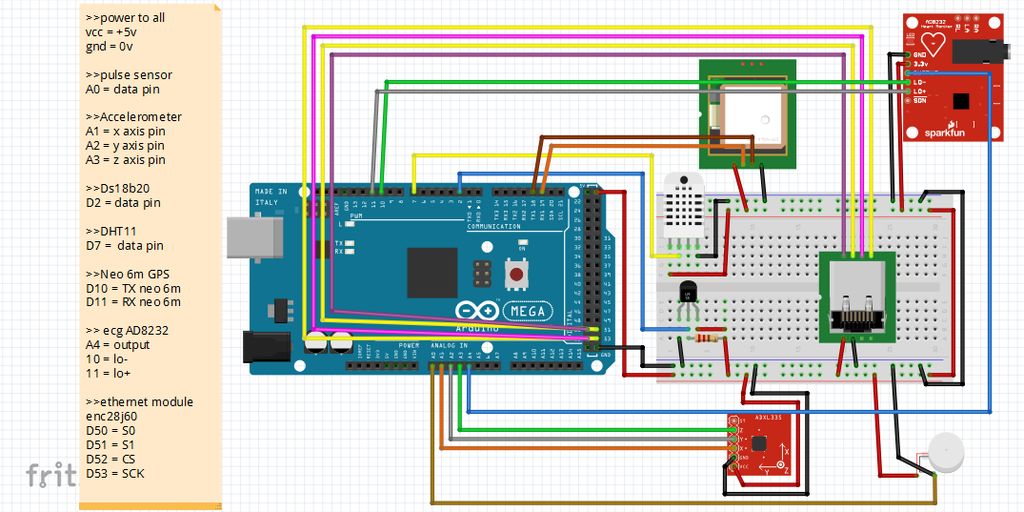
#define DHT11_PIN 3
TinyGPS gps;
SoftwareSerial ss(19, 18);
const int xpin = A3; // x-axis of the accelerometer
const int ypin = A2; // y-axis
const int zpin = A1; // z-axis (only on 3-axis models)
const int ecgpin = A4;
int pulsePin = A0; // Pulse Sensor purple wire connected to analog
pin 0
volatile int BPM; // int that holds raw Analog in 0. updated every
2mS
28
volatile int Signal; // holds the incoming raw data
volatile int IBI = 600; // int that holds the time interval between beats!
volatile boolean Pulse = false; // "True" when User's live heartbeat is
volatile boolean QS = false; // becomes true when Arduoino finds a beat.
// Regards Serial OutPut -- Set This Up to your needs
static boolean serialVisual = true;
unsigned long myChannelNumber = xxxxx;
const char * myWriteAPIKey = "xxxxxxxxxxxxxx";
void setup()
{
Serial.begin(115200); //Begin serial communication ss.begin(9600);
Serial.println("healthcare"); //Print a message
sensors.begin();
Ethernet.begin(mac);
ThingSpeak.begin(client);
interruptSetup(); // sets up to read Pulse Sensor signal every 2mS
pinMode(10, INPUT); // Setup for leads off detection LO + pinMode(11, INPUT); // Setup for leads off detection LO -
}
void loop() {
float moisture, fahrenheit, pulse, acc, results[2], x, y,z, ecg ; // Send the command to get temperatures
fahrenheit = temperature (); Serial.print(fahrenheit); Serial.print(" Fahrenheit ");
moisture = humidity();
{
if( moisture >0)
{
z = moisture; Serial.print(z); Serial.print(" moisture ");
29
}
else
{
z= 69; Serial.print(z);
Serial.print(" moisture ");
}
}
pulse = heart(); Serial.print(BPM); Serial.print(" BPM ");
acc = acclerometer (); Serial.print(acc); Serial.print(" Acc ");
ecg = ECG(); Serial.print(ecg); Serial.println(" ECG ");
getData(results); if ( results[0] > 0 )
{
if ( results[1]> 0 )
{
x = results[0]; Serial.print( x ); Serial.print(" lat "); y = results[1] ; Serial.print( y ); Serial.println(" lon ");
}
}
// Write to ThingSpeak. There are up to 8 fields in a channel, allowing you to store up to 8 different
// pieces of information in a channel. Here, we write to field 1.
ThingSpeak.setField(1, fahrenheit );
ThingSpeak.setField(2, z );
ThingSpeak.setField(3, BPM );
ThingSpeak.setField(4, acc );
30
ThingSpeak.setField(5, x );
ThingSpeak.setField(6, y );
ThingSpeak.setField(7, ecg );
// Write the fields that you've set all at once. ThingSpeak.writeFields(myChannelNumber, myWriteAPIKey);
// ThingSpeak will only accept updates every 15 seconds.
}
int temperature ()
{
sensors.requestTemperatures(); float temp, fahrenheit;
temp = sensors.getTempCByIndex(0); fahrenheit = temp * 1.8 + 32.0;
return fahrenheit;
}
int humidity()
{
float chk = DHT.read11(DHT11_PIN); return DHT.humidity;
}
int heart()
{
serialOutput() ;
if (QS == true){ // A Heartbeat Was Found
// BPM and IBI have been Determined
// Quantified Self "QS" true when arduino finds a heartbeat
if (serialVisual == true){ // Code to Make the Serial Monitor
return BPM;
} else{
sendDataToSerial('B',BPM); // send heart rate with a 'B' prefix
sendDataToSerial('Q',IBI); // send time between beats with a 'Q' prefix
}
31
QS = false; // reset the Quantified Self flag for next time
}
}
float acclerometer()
{
float acc,xpin,ypin,zpin; xpin= analogRead(xpin); ypin= analogRead(ypin); zpin= analogRead(zpin);
xpin = map(xpin, 0, 1023, 0, 255); ypin = map(ypin, 0, 1023, 0, 255); zpin = map(zpin, 0, 1023, 0, 255);
acc = ( xpin + ypin + zpin)/3; return acc;
}
float ECG()
{
float ecg;
if((digitalRead(10) == 1)||(digitalRead(11) == 1)){ Serial.println('!');
}
else{
ecg = analogRead(ecgpin); return ecg;
}
}
void getData(float *dest)
{
bool newData = false; float flat, flon;
// For one second we parse GPS data and report some key values for (unsigned long start = millis(); millis() - start < 1000;)
{
while (ss.available())
{
32
char c = ss.read();
// Serial.write(c); // uncomment this line if you want to see the GPS data flowing
if (gps.encode(c)) // Did a new valid sentence come in? newData = true;
}
}
if (newData)
{
gps.f_get_position(&flat, &flon);
flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flat, 6; flon == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : flon, 6;
}
dest[0] = flat; dest[1] = flon;
}




_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










{kind=link}
Comments
Please log in or sign up to comment.