// this coding provided by technical romboz
// tutorial video https://www.youtube.com/watch?v=53ykX3utPtw&t=28s
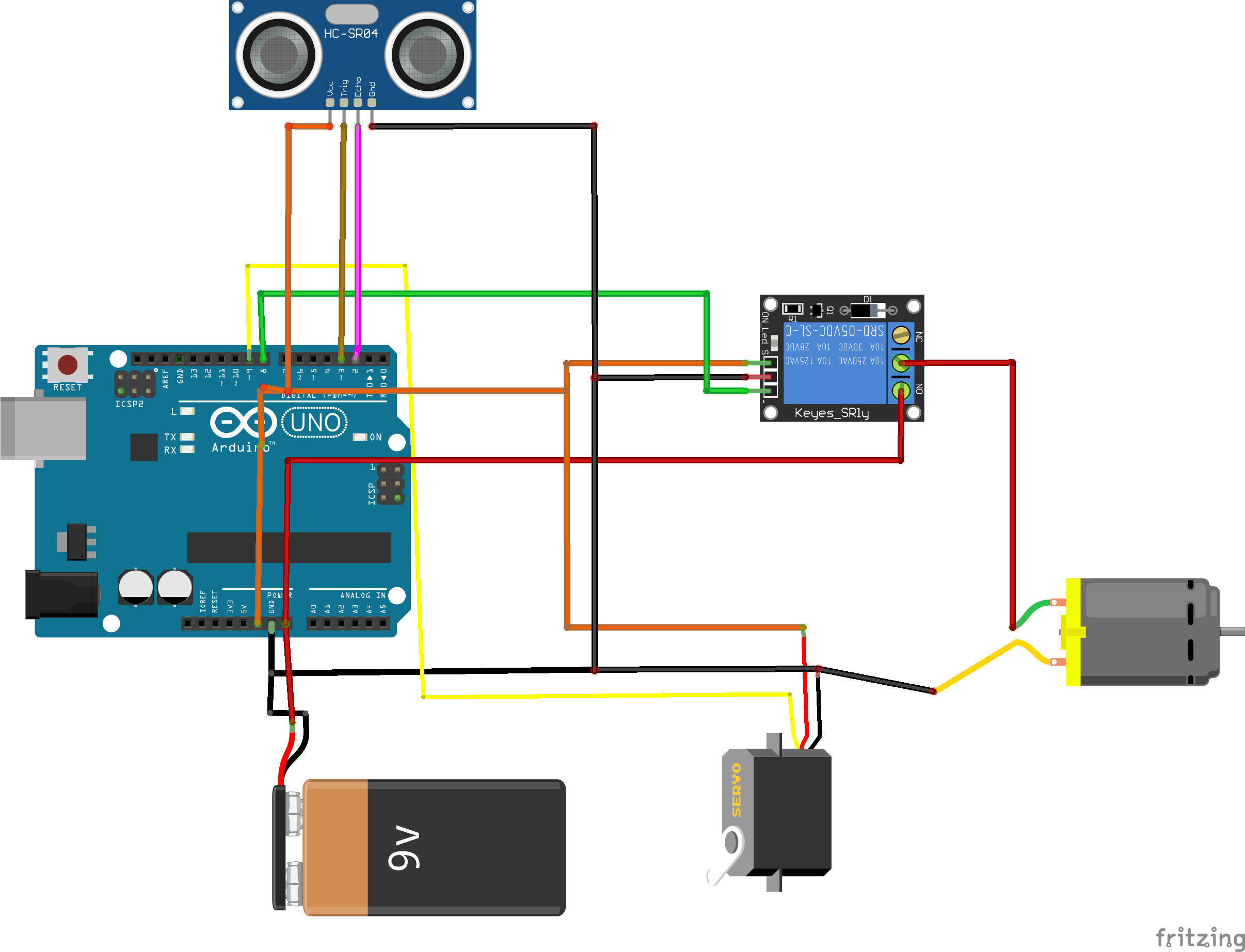
#include <Servo.h>
#define echoPin 14
#define trigPin 12
#define motor 2 // relay pin to operate motor
Servo myservo; // create servo object to control a servo
long duration;
int distance;
void setup()
{
Serial.begin(9600);
pinMode(trigPin,OUTPUT);
pinMode(echoPin,INPUT);
pinMode(motor,OUTPUT);
myservo.attach(5,500,2500); // attaches the servo on pin 9 to the servo object
}
void loop()
{
digitalWrite(trigPin,LOW);
delayMicroseconds(2);
digitalWrite(trigPin,HIGH);
delayMicroseconds(10);
digitalWrite(trigPin,LOW);
duration=pulseIn(echoPin,HIGH);
distance=(duration*0.034/2);
Serial.print("Distance : ");
Serial.print(distance);
Serial.println(" cm ");
delay(100);
if (distance <=50)
{
digitalWrite(motor,LOW);
delay(1000);
myservo.write(180);
delay(2000);
digitalWrite(motor,HIGH);
delay(1500);
myservo.write(0);
delay(1000);
}
else
digitalWrite(motor,HIGH);
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)









{kind=link}
Comments
Please log in or sign up to comment.