#include <SPI.h>
#include<WiFiNINA.h>
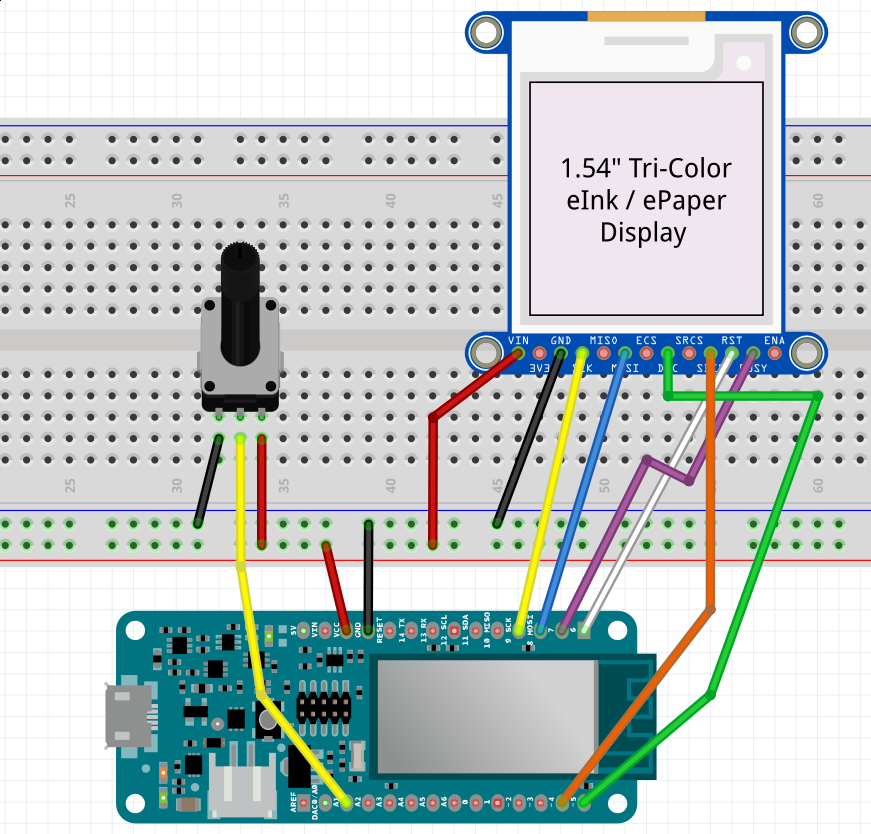
// display includes
#include <fonts.h>
#include <epdpaint.h>
#include <epd2in13b.h>
#include <epdif.h>
// -----------------------------------------------------------------------
// Variables
// -----------------------------------------------------------------------
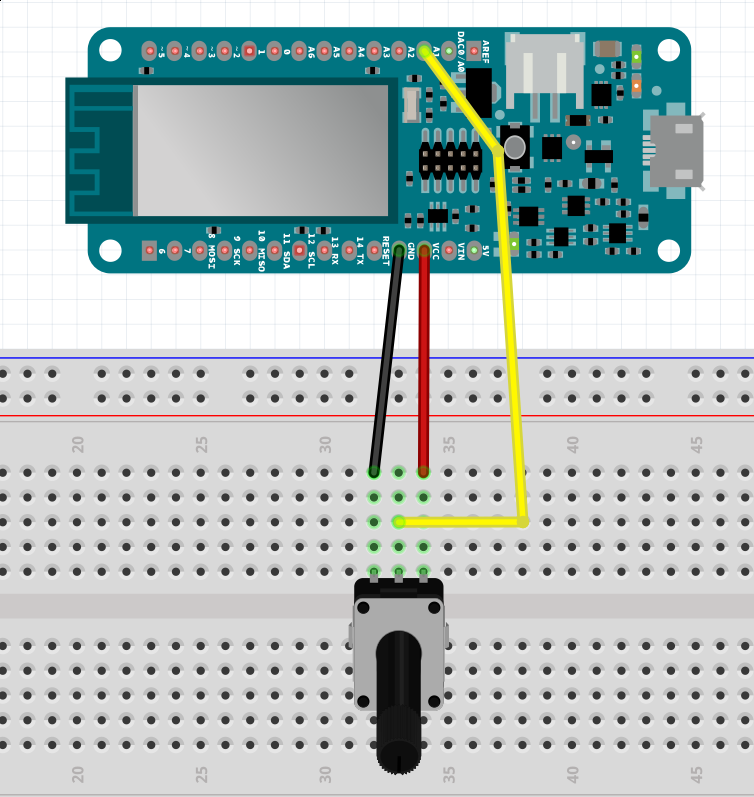
const int potPin = A1; // potentiometer pin
int pot_val = 0; // Value of potentiometer pin
int pot_val_sum = 0; // sum of 10 measures of pot_val
int current_position; // current position
int new_position; // position read from poti
int stable_count = 0; // counts how many times current and new position are the same;
char ssid[] = "e.g. AndroidAP"; // your network SSID (name)
char pass[] = "aaa...."; // your network password (use for WPA, or use as key for WEP)
char server[] = "docs.google.com"; // google forms server
int status = WL_IDLE_STATUS; //
WiFiSSLClient client; // client object which does the calls
// --- some variables for the display output
unsigned long start_time; // stores millis, used to update progress bar
char progress_bar[9] = "[......]"; // progress bar
int progress_bar_pos = 1;
#define COLORED 0
#define UNCOLORED 1
unsigned char image[1024];
Paint paint(image, 28,192); //width should be the multiple of 8
Epd epd;
// ------- end of display output variables
String jobs[11] = {
"A Admin",
"A Testing",
"A Analysis",
"A Coord",
"B Admin",
"B Coord",
"B Analysis",
"B Testing",
"Internal training",
"internal admin",
"Pause"
};
// -----------------------------------------------------------------------
// Functions
// -----------------------------------------------------------------------
/*
takes value from the poti and returns the position of the pointer
*/
int calculate_position(float val) {
int position = 10;
if(val < 20) position = 0;
else if(val < 96) position = 1;
else if(val < 213) position = 2;
else if(val < 316) position = 3;
else if(val < 458) position = 4;
else if(val < 598) position = 5;
else if(val < 721) position = 6;
else if(val < 838) position = 7;
else if(val < 936) position = 8;
else if(val < 1010) position = 9;
else position = 10;
return position;
}
/*
Defines job strings for sending to backend
*/
String storeWork(int pos) {
// the Serial.print commands are just for debugging.
Serial.print("storing job ");
Serial.println(jobs[pos]);
String jobdata = jobs[pos];
jobdata.replace(" ", "%20"); // replace '%20' with empty spaces
// https://www.instructables.com/id/Post-to-Google-Docs-with-Arduino/ explains how to get the correct
// google form url and the endtry id
if (client.connectSSL(server, 443)) {
client.print("GET http://docs.google.com/forms/d/e/ <id of your google form> /formResponse?entry.<id of your google forms entry field number>=");
client.print(jobdata);
client.println(" HTTP/1.1");
client.println("Host: docs.google.com");
client.println("Cache-Control: no-cache");
client.println("Connection: close");
client.println();
}
// set start time for progress_bar timer
start_time = millis();
// reset progress Bar
for (int i = 1; i < 7; i++) {
progress_bar[i] = '.';
}
progress_bar_pos = 1;
drawString(jobdata);
// drawProgressBar(); //TODO: uncomment if new display is super fast updating
// currently I do not draw a progress bar after selecting a new job
return "ok";
}
/*
* Draw String on EPD
*/
void drawString(String jobdata) {
// replace %20
jobdata.replace("%20", " ");
// convert String to char Array
char jobchars[30];
jobdata.toCharArray(jobchars,30);
epd.ClearFrame();
paint.SetRotate(ROTATE_90);
paint.Clear(UNCOLORED);
paint.DrawStringAt(8, 2, jobchars, &Font16, COLORED);
epd.SetPartialWindowBlack(paint.GetImage(), 50, 16, paint.GetWidth(), paint.GetHeight());
epd.DisplayFrame();
};
/*
* draw progress bar on EPD
*/
void drawProgressBar() {
paint.Clear(UNCOLORED);
paint.DrawStringAt(8,2, progress_bar, &Font16, COLORED);
epd.SetPartialWindowBlack(paint.GetImage(), 20, 16, paint.GetWidth(), paint.GetHeight());
epd.DisplayFrame();
}
/*
* update progress_bar string
*/
void updateProgressBar() {
// calculate time_past
if (millis() - start_time > 300000) { //do stuff every 5 minutes
if (progress_bar_pos < 7) {
progress_bar[progress_bar_pos] = '=';
progress_bar_pos++;
drawProgressBar();
}
start_time = millis(); // reset time to current
}
}
// -----------------------------------------------------------------------
// Setup
// -----------------------------------------------------------------------
void setup() {
pinMode(potPin, INPUT);
Serial.begin(9600);
delay(1000);
Serial.println("init Display");
// initilize Display
if (epd.Init() != 0) {
Serial.print("e-Paper init failed");
return;
}
// attempt to connect to Wifi network:
while (status != WL_CONNECTED) {
Serial.print("Attempting to connect to SSID: ");
Serial.println(ssid);
// Connect to WPA/WPA2 network. Change this line if using open or WEP network:
status = WiFi.begin(ssid, pass);
// wait 10 seconds for connection:
delay(7000);
}
Serial.println("Connected to wifi");
current_position = -1;
}
// -----------------------------------------------------------------------
// Loop
// -----------------------------------------------------------------------
void loop() {
// read potentiometer value 10 times and get average to flatten out outlier readings
// of the potentiometer
for (int i = 0; i < 10; i++) {
pot_val = analogRead(potPin);
pot_val_sum = pot_val_sum + pot_val;
}
float flat_pot_val = pot_val_sum/10;
pot_val_sum = 0; // reset to 0 for next loop.
// Serial.println for debug
Serial.println(flat_pot_val);
new_position = calculate_position(flat_pot_val);
// only store new job if potentiometer was not moved for one second
// like this I avoid storing several jobs when the user turns the knob all over
// the scale
if (new_position != current_position) {
stable_count = 0;
}
if (stable_count == 1) {
storeWork(new_position);
}
current_position = new_position;
stable_count++;
// update progress bar
updateProgressBar();
delay(1000);
}












{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.