Do you get home from work after dark? Are you tired of stumbling around looking for your poorly-placed light switch? Are you just too lazy to get out of bed and turn the lights off before you go to sleep? We've built a Bluetooth based project that signals an Arduino to power a DC motor to flick your light switch off or on. All you have to do is bolt it to the wall next to almost any switch, and control it with your android phone!
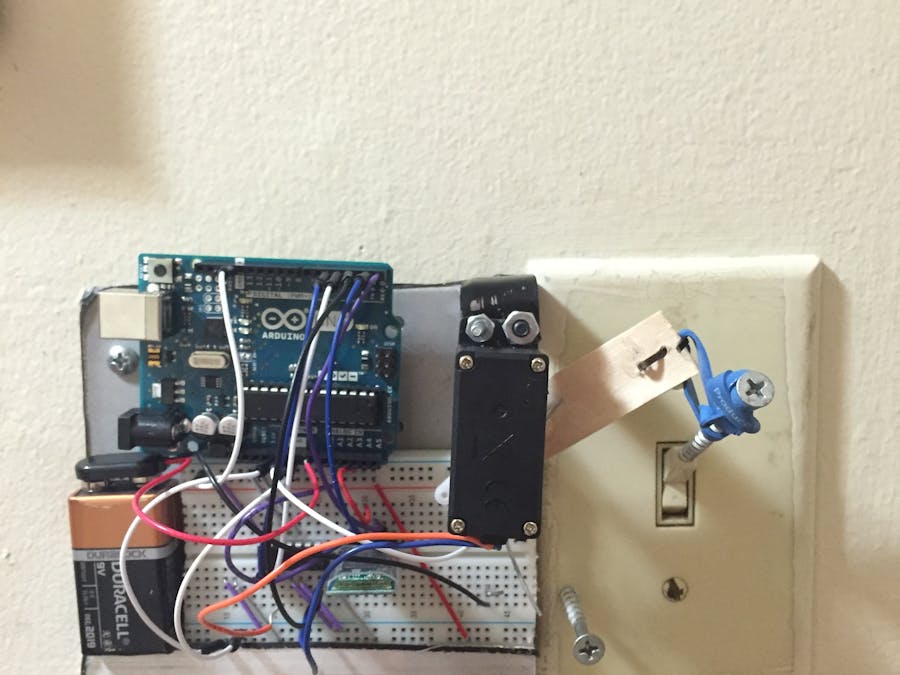
Switch Flicker mounted in my bedroom.
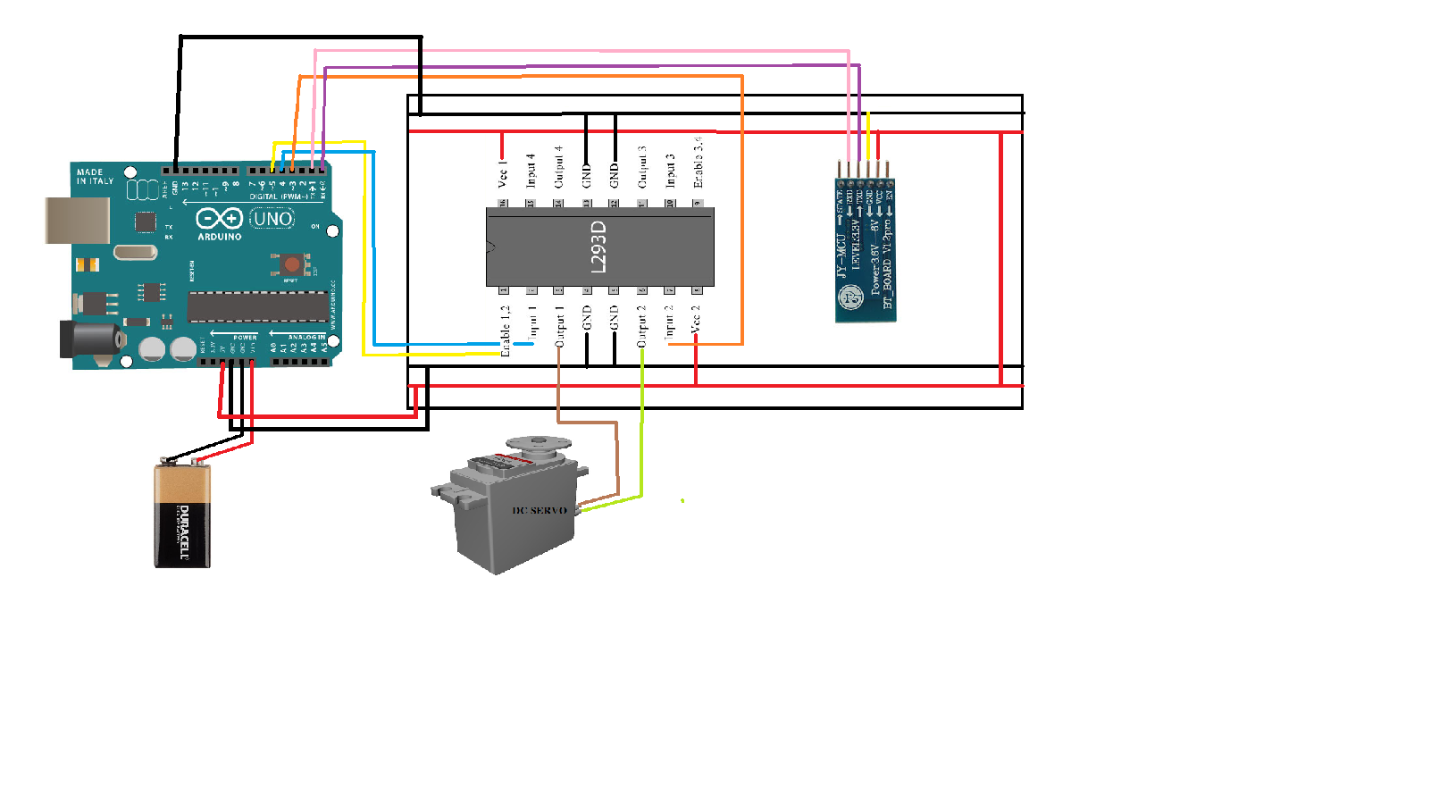
When you connect to the device via any Arduino Bluetooth app, you send signals to the controller using your phones keypad. Sending a number 1 flicks the lights on, and sending a number 2 flicks them off. The 180 degree servo used is a hitec-311 gear motor. We converted the motor to DC for ease of directional control with the stepper motor driver.







_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










{kind=link}
Comments
Please log in or sign up to comment.