


Hardware components | ||||||
 |
| × | 1 | |||
![evive Robotic Arm Kit [Add-on]](https://hackster.imgix.net/uploads/attachments/588967/evive_robotic_arm_1920x1280_kbfZsRxEoe.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
It's night-time and you're on your desk, burning the midnight oil to finish off with your project which is due the next day. There are tons of things left to do and it seems to be taking forever to finish! Only if you had more than two hands!Psst. What if you were told that it is now possible for you to have more than two hands? What if you were told that there exists 'something' that could grab stuff for you and hand it over to you while you carry on with your work?
Behold the Pick-and-Place Robotic Arm!
This robotic arm is a four degree of freedom robotic arm capable of picking and placing small objects. With medium-sized links, the robotic arm can fit perfectly on your tabletop, use the clip to attach it to your table. With its help, you can reach to places 'never explored' on your table and get hold of things without moving an inch.
Ready to get your work done in a jiffy? Then get rollin'!
Step 1: Things You'll NeedThings you'll need to make a Pick and Place Robotic Arm are:
- Robotic Arm Kit (2 Metal Servo and accessories, 2 Micro Servo and accessories, 1 Acrylic Part: Top Inner Bearing Disc, 1 Acrylic Part: Outer Bearing Disc, 1 Acrylic Part: Bottom Inner Bearing Disc, 2 Acrylic Part: Middle Inner Bearing Disc, 3 Acrylic Part: Middle Outer Bearing Disc, 1 Acrylic Part: Racquet Shaped Link -1, 1 Acrylic Part: Racquet Shaped Link -2, 1 Acrylic Part: Support Link, 1 Acrylic Part: Servo Holder, 1 Acrylic Part: Gripper Plate, 1 Acrylic Part: Gripper Part1, 1 Acrylic Part: Gripper Part2, 1 Acrylic Part: Gripper Part, 1 Acrylic Part: Gripper Claw 1, 1 Acrylic Part: Gripper Claw 2, 2 Acrylic Part: Gripper Link, 1 Bearing, 3 M2 bolts of 12 mm, 35 M3 bolts of 8 mm, 8 M3 bolts of 20 mm, 10 M4 bolts of 16 mm, 2 M2 Nuts, 5 M3 Nuts, 6 M4 Nuts)
Take the bottom outer bearing disc and slide it over standoffs. Mount bottom inner bearing disc on stand-offs. Align the disc such that smaller holes are in line with the stand-offs. Put the bearing on top of bottom inner bearing disc. Observe how disc supports the bearing from beneath.
- Place 30 mm stand-offs on the base. Fasten using M3 bolts of 8mm length.
- Take the bottom outer bearing disc and slide it over standoffs.
- Mount bottom inner bearing disc on stand-offs. Align the disc such that smaller holes are in line with the stand-offs.
- Put the bearing on top of bottom inner bearing disc. Observe how disc supports the bearing from beneath.
- Next, place the two middle inner bearing discs. These will perfectly fit inside the bearing.
Note1: Do understand that it was necessary to slide down the bottom outer bearing disc earlier. You won’t be able to do it now due to diameter differences.
Note2: Observe how the bearing has been clamped between the top and bottom inner bearing discs.
Step 3: Attaching Base Servo Horn- Mount servo horn on top inner bearing disc using self-threading M2 (“M2” represents a diameter of 2mm) screws of 8mm length. These screws can be found in servo accessories. Be careful about holes you are mounting the horn on (use holes closer to disk centre).
- Seat the “servo horn & top inner bearing disc” assembly on top of bearing as shown. Make sure all smaller holes in these discs are aligned since we will fasten them all together using 20mm M3 bolts.
Note1: Do understand that it was necessary to slide down the bottom outer bearing disc earlier. You won’t be able to do it now due to diameter differences.
Note2: Observe how the bearing has been clamped between the top and bottom inner bearing discs.
Step 4: Completing the Base Assembly- Place the middle outer bearing discs first and then top outer bearing disc as shown. The middle discs will have a larger inner diameter compared to the top and bottom ones. The inner diameters of the middle discs will be equal to the bearing’s outermost diameter.
- Slide up the bottom outer bearing disc, align the holes in the discs and stack them. Thus, sandwiching the bearing as the top and bottom bearing discs have a smaller inner diameter compared to the bearing’s outermost diameter.
- Place 20 mm stand-offs on the top and fasten the M3 bolts of 20mm length from the bottom. Your base is completed now.
- Place servo motor into the slot available on racquet-shaped link 1. Be careful about the positioning and the orientation of the servo.
- Fasten the servo to the link using M4 bolts of 16mm length and nuts.
- The head of the servo pointing upwards. Don’t let this confuse you; the head actually goes into the slot in the horn. Attach M3 bolts of 8mm length and 20mm standoffs to the link.
This is the orientation in which we will place the completed link upon our base. Note the free holes through which we will drive the screws to fix it to the base.
- Place the assembly of the Link on the base as shown & fasten using M3 bolts of 8mm length. Keep in mind that you’ve set servo at 90 degrees before assembling (connect the servo to evive, go to control > servo and set servo at 90 degrees).
- Observe how the head of the servo goes into the servo horn. We have to ensure proper locking between the servo head and servo horn. To do this, drive a bolt into the centre of the horn (find this in servo accessories) through the bottom of the base (through the large hole) and fasten it.
It is important to ensure that your servo motor does not move vertically and exhibits only rotary motion while in operation.
Step 8: Completing the Assembly of the First Link- Push the servo in the slot provided on the racquet shaped link 2 as shown and fasten it using M4 bolts of 16mm length and M4 nuts. Notice the difference between this step and what we did for the sketching robot.
- Place this on the base and fasten using M3 bolts of 8mm length.
The head of the Servo points upwards.
Step 9: Getting Started With the Second Link- Take the supporting link and attach a servo horn to it as shown. Fasten the horn with M2 bolts of 8mm length.
- Fit the servo holder into the rectangular slots provided on the supporting link.
- Insert M3 nuts into the slots provided in the servo holder and fasten with M3 bolts of 8mm length.
- Slide the micro servo into the servo holder as shown and then fix it in place using M2 bolts of 12mm length.
- Insert another micro servo into the slot on the gripper plate as shown, then affix it there using M2 bolts of 8mm length and M2 nuts.
- Fasten 15mm standoffs to the plate using M3 bolts of 8mm length.
- Insert gripper part 1 into the thin slot provided on the gripper plate. Note that this part is not symmetric and the small square slots are nearer to one end than to the other.
- Slide gripper part 2 (with a thin slit) onto the protrusion on gripper part 1.
- Notice that gripper part 2 has holes 3mm in diameter so that threaded part of standoffs may pass through it. Fasten these parts using M3 nuts.
- Insert gripper part 3 into the rectangular holes of gripper part 1 as shown and place M3 nuts and fasten using M3 bolts of 12mm length.
- Now attach a micro servo horn on gripper part 3 with its holes aligned with the holes on gripper part 3 and fasten with self-threading M2 bolts of 8mm length (from micro servo accessories).
- Bring together gripper claw 1, gripper link and a one-sided micro servo horn in the configuration shown. First, fasten gripper link to the one-sided micro servo horn using the self-threading M2 bolt from micro servo accessories. Keep in mind, protruded end of servo horn should be facing the servo.
- Next, insert the M3 bolt of 12mm length to gripper claw 1. Hold the “gripper link and servo horn” assembly intact. Then insert gripper link 1 onto this bolt and fasten an M3 lock nut on the same. Ensure that the links are movable about the bolt but they shouldn’t be too loose.
- Now lock the one-sided micro servo horn and the free servo head using the self-threading bolt from micro servo accessories. Ensure the micro servo is at 90 degrees before assembling.
- Now, note that there is a free hole on the gripper plate and that gripper claw 1 is in front of the other hole. Intuitively, place gripper claw 2 on the other hole. Now, M4 bolts of 16mm length in both these holes and fasten using M4 lock nuts. Keep in mind that claws aren’t too loose but are free to rotate about these bolts.
Rejoice! For the most sophisticated part is complete!
Step 12: Attaching Gripper Assembly to the Link- The micro servo horn on the assembly is still free. We left a micro servo head free too in step 9, where we started making the gripper. Use bolts from micro servo accessories to lock both of these together (ensure micro servo is at 90 degrees before fixing), hence fixing the gripper to the supporting link through the micro servo.
- Now, attach 20mm standoffs to supporting link and fasten M3 bolts of 8mm length, subsequently bring link 2, align it with the standoffs and fasten M3 bolts of 8mm length.
Now, we have assembled the second link with the gripper. All that remains now is to attach this with the first link.
Step 13: Attaching the Second Link to the First LinkNow, set the servo angle to 180 degrees. There is another horn at the bottom of the supporting link which has to be connected to a servo head. Also, recall that there is a free servo head in the first link. Simply lock the two with a bolt from servo accessories and the robot will be complete.
The assembly is complete now!
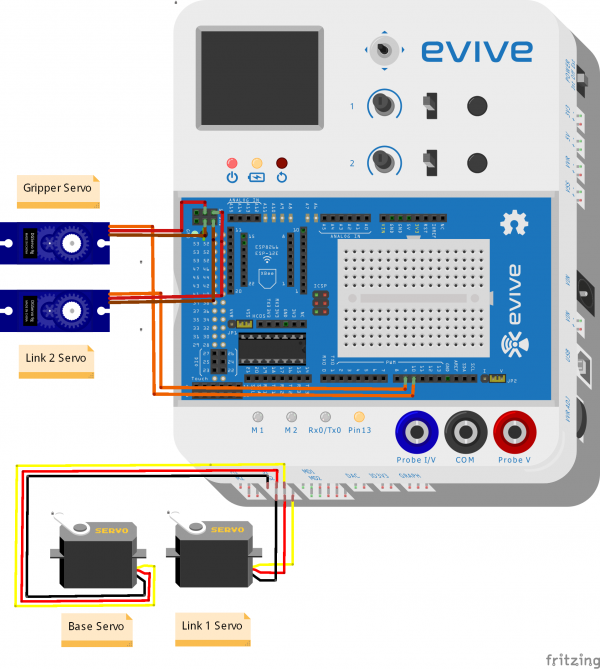
Step 14: Circuit Diagram of the Robotic ArmConnect four motors according to the following:
- Base Servo – Channel 1;
- Link 1 Servo – Channel 2;
- Gripper Servo – Digital Pin 10;
- Link 2 Servo – Digital Pin 9.
In this program we are controlling the robotic arm using potentiomters and slide switch.
- Base Servo is controlled using potentiometer 1
- Link 1 Servo is controlled using potentiometer 2
- Link 2 Servo is controlled using slide switch 1
- Gripper Servo is controlled using slide switch 2
This program also shows the variable voltage on the screen.
Caution: The robotic arm should operate at 6V using a 2A power supply.
For this program you will need evive library.
Step 16: ConclusionWith this, we're done with your state-of-the-art robotic arm!
Now, watch as your work gets done in a jiffy and how things come to you instead of you having to go to it.
Have fun! ;)
To explore more project visit here: http://thestempedia.com/projects.



{kind=link}
Comments
Please log in or sign up to comment.