I made this project at 7:00 am because I couldn't sleep! I was hoping to make other people happy with this flag. I wanted other people to set them up and surprise strangers and friends alike. I hope you enjoy this project!
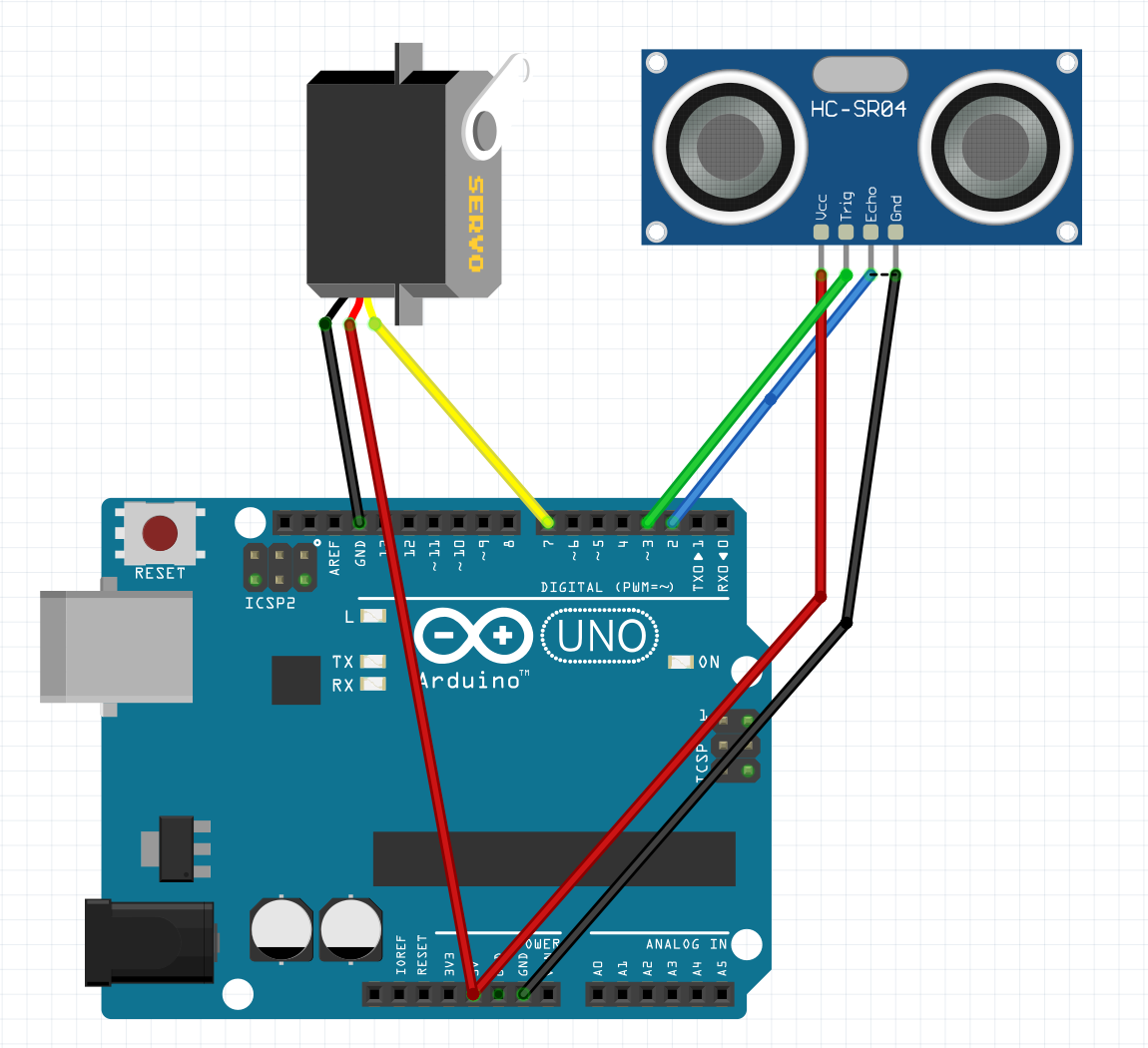
Instructions:Stepone: add the female/male jumper wires to the ultrasonic sensor. Wire the vcc to 5v, gnd to gnd, trig to digital 3, and echo to digital 2.
Steptwo: wire the male/male wires to the servo. Black to gnd, Red to vcc, and yellow to 7.
Step three: hot glue the ultrasonic sensor to the top of the chopstick, then hot glue the chopstick to the board.
Stepfour: hot glue the popsicle to the servo motor, and add your sign to the popsicle stick.
Stepfive: use the cardboard to cover the servo and sign. I attached the servo to my board and then hot glued the cardboard to the bottom. Check the image if it helps.
Stepsix: make sure that everything is attached correctly and then plug the usb b side of the cord into your board and then the usb a into your computer. Upload the code, then stand back and wave your hand in front of the ultra sensor. It should raise the sign, pause, and lower it back down.
Congratulations! Now go hide your new creation and wait for someone to walk past!


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)













{kind=link}
Comments