/* ###############################################
Color constants for Makeblock Me TFT LCD
############################################### */
#define _BLACK 0
#define _RED 1
#define _GREEN 2
#define _BLUE 3
#define _YELLOW 4
#define _CYAN 5
#define _PINK 6
#define _WHITE 7
/* ###############################################
I/O Assignments
############################################### */
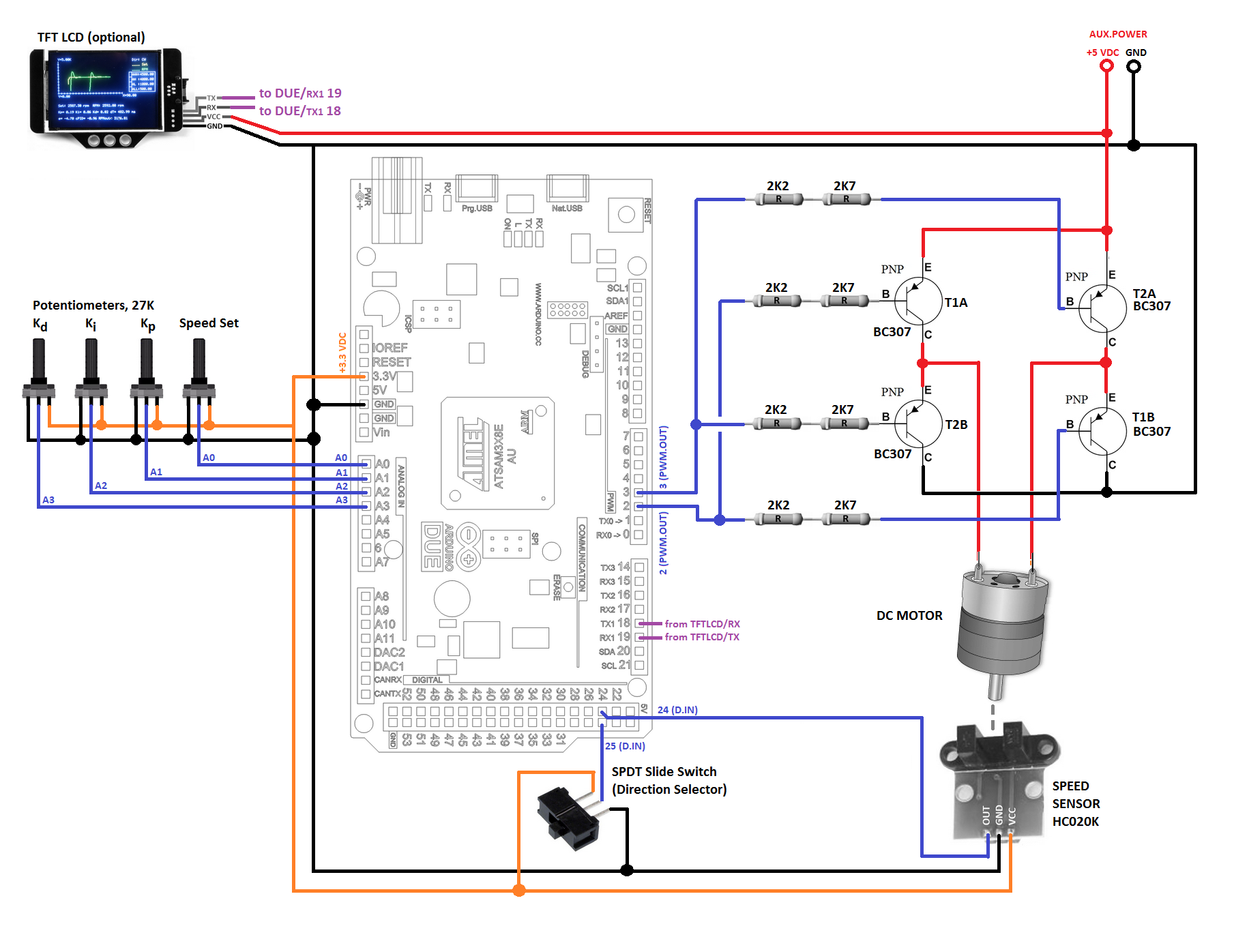
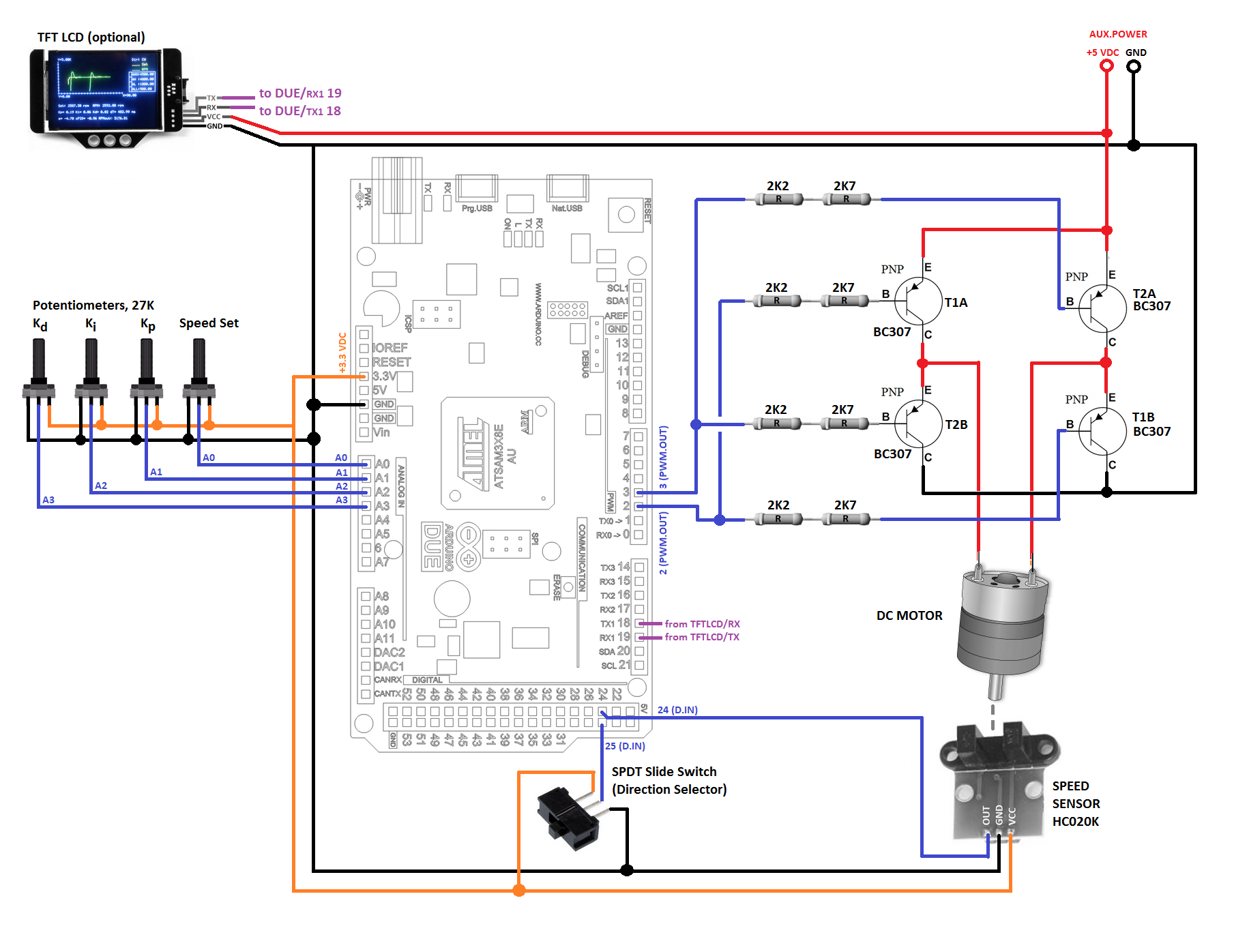
int _chSpeedSet = A0, // Speed setpoint
_chKp = A1, // Proportional coefficient reading for PID controller
_chKi = A2, // Integral coefficient reading for PID controller
_chKd = A3, // Derivative coefficient reading for PID controller
_chMotorCmdCCW = 3, // PWM output to motor for counter-clockwise turn
_chMotorCmdCW = 2, // PWM output to motor for clockwise turn
_chSpeedRead = 24, // Speed reading
_chDirection = 25; // Direction selector reading
/* ###############################################
Other Constants
############################################### */
#define _minRPM 0 // Minimum RPM to initiate direction changing
#define _maxRPM 6000 // Maximum RPM limit
#define _Tmax 90 // Maximum time limit for graphing
#define _DiscSlots 20 // Qty of slots on Index Disc
/* ###############################################
Global Variables
############################################### */
String Cartesian_SetupDetails;
boolean Direction, prevDirection;
// Alarm Settings
float RALL=500.0, RAL=1000.0, RAH=4000.0, RAHH=4500.0;
float Seconds=0.0, prevSeconds=0.0,
prevRPM=0.0, prevRPMset=0.0,
RPM=0.0, RPMset=0.0, OutputRPM=0.0,
Kp=0.0, Ki=0.0, Kd=0.0,
Kpmax=2.0, Kimax=1.0, Kdmax=1.0,
E=0.0, Eprev=0.0, dT=1.0;
/* ###############################################
CommandToTFT(TFTCmd)
Command Function for Makeblock Me TFT LCD
Input Parameters:
(String) TFTCmd : Command string
############################################### */
void CommandToTFT(String TFTCmd)
{
/* Serial Connection used for display */
Serial1.println(TFTCmd); delay(5);
}
/* ########### End of CommandToTFT() ########### */
/* ############################################# */
/* ###############################################
Cartesian_Setup(Xmin, Xmax, Ymin, Ymax, Window_X1, Window_Y1, Window_X2, Window_Y2, MinDashQty, ColorF, ColorX, ColorY)
Cartesian X-Y Axis Drawing Function for Makeblock Me TFT LCD
Input Parameters:
(float) Xmin, Xmax, Ymin, Ymax : Axis range values
(int) Window_X1, Window_Y1___: Upper-left corner of graph window
(int) Window_X2, Window_Y2___: Lower-right corner of graph window
(int) MinDashQty_____________: Qty.of dashes on shortest axis
(int) ColorB, ColorX, ColorY : Drawing colors for Frame, X-axis and Y-axis
Uses external function CommandToTFT().
############################################### */
String Cartesian_Setup(
float Xmin, float Xmax, float Ymin, float Ymax,
int Window_X1, int Window_Y1, int Window_X2, int Window_Y2,
int MinDashQty, int ColorF, int ColorX, int ColorY
)
{
/* Screen Limitations */
const int DisplayResolutionX = 319, DisplayResolutionY = 239;
/* Limit Title Strings */
String XminTxt;
if (abs(Xmin)>=1000000000) XminTxt = "X=" + String (Xmin/1000000000) + "G";
else if (abs(Xmin)>=1000000) XminTxt = "X=" + String (Xmin/1000000) + "M";
else if (abs(Xmin)>=1000) XminTxt = "X=" + String (Xmin/1000) + "K";
else XminTxt = "X=" + String (Xmin);
String XmaxTxt;
if (abs(Xmax)>=1000000000) XmaxTxt = "X=" + String (Xmax/1000000000) + "G";
else if (abs(Xmax)>=1000000) XmaxTxt = "X=" + String (Xmax/1000000) + "M";
else if (abs(Xmax)>=1000) XmaxTxt = "X=" + String (Xmax/1000) + "K";
else XmaxTxt = "X=" + String (Xmax);
String YminTxt;
if (abs(Ymin)>=1000000000) YminTxt = "Y=" + String (Ymin/1000000000) + "G";
else if (abs(Ymin)>=1000000) YminTxt = "Y=" + String (Ymin/1000000) + "M";
else if (abs(Ymin)>=1000) YminTxt = "Y=" + String (Ymin/1000) + "K";
else YminTxt = "Y=" + String (Ymin);
String YmaxTxt;
if (abs(Ymax)>=1000000000) YmaxTxt = "Y=" + String (Ymax/1000000000) + "G";
else if (abs(Ymax)>=1000000) YmaxTxt = "Y=" + String (Ymax/1000000) + "M";
else if (abs(Ymax)>=1000) YmaxTxt = "Y=" + String (Ymax/1000) + "K";
else YmaxTxt = "Y=" + String (Ymax);
/* Limits */ int XminPx = Window_X1+1; int XmaxPx = Window_X2-1;
int YmaxPx = Window_Y1+1; int YminPx = Window_Y2-1;
/* Origin */ int OriginX = XminPx + (int)( (XmaxPx - XminPx) * abs(Xmin) / (abs(Xmax)+abs(Xmin)) );
int OriginY = YmaxPx + (int)( (YminPx - YmaxPx) * abs(Ymax) / (abs(Ymax)+abs(Ymin)) );
/* Frame */ CommandToTFT ( "BOX(" + String(Window_X1) + "," + String(Window_Y1)+ "," +
String(Window_X2) + "," + String(Window_Y2)+ "," +
String(ColorF) + ");"
);
/* X Axis */ CommandToTFT ( "PL(" + String(Window_X1+1) + "," + String(OriginY) + "," +
String(Window_X2-1) + "," + String(OriginY) + "," +
String(ColorX) + ");"
);
/* Y Axis */ CommandToTFT ( "PL(" + String(OriginX) + "," + String(Window_Y1+1) + "," +
String(OriginX) + "," + String(Window_Y2-1) + "," +
String(ColorY) + ");"
);
/*
Dashing: Minimum amount of dashes is given by "MinDashQty" and will be dashed on the shortest
axis-side with respect to origin.
On the other sections, dashes to be marked shall be determined by considering ratio to
shortest axis-side.
*/
/* Dashing */ int XlengthLeft = abs(XminPx-OriginX); int XlengthRight = abs(XmaxPx-OriginX);
int YlengthLower = abs(YminPx-OriginY); int YlengthUpper = abs(YmaxPx-OriginY);
int XlengthLeft_Mod, XlengthRight_Mod, YlengthLower_Mod, YlengthUpper_Mod;
if (XlengthLeft<=1) XlengthLeft_Mod=32767; else XlengthLeft_Mod=XlengthLeft;
if (XlengthRight<=1) XlengthRight_Mod=32767; else XlengthRight_Mod=XlengthRight;
if (YlengthLower<=1) YlengthLower_Mod=32767; else YlengthLower_Mod=YlengthLower;
if (YlengthUpper<=1) YlengthUpper_Mod=32767; else YlengthUpper_Mod=YlengthUpper;
int MinAxisLength = min ( min (XlengthLeft_Mod,XlengthRight_Mod), min (YlengthLower_Mod,YlengthUpper_Mod) );
int XdashesLeft = MinDashQty * XlengthLeft / MinAxisLength;
int XdashesRight = MinDashQty * XlengthRight / MinAxisLength;
int YdashesLower = MinDashQty * YlengthLower / MinAxisLength;
int YdashesUpper = MinDashQty * YlengthUpper / MinAxisLength;
int DashingInterval=2; // Min.interval btw.dashes
/* X-Dash L */ DashingInterval = (int) (XlengthLeft / XdashesLeft);
if (!(DashingInterval<2))
for (int i=OriginX; i>=XminPx; i-=DashingInterval)
CommandToTFT ( "PL(" + String(i) + "," + String(OriginY-2) + "," +
String(i) + "," + String(OriginY+2) + "," +
String(ColorX) + ");"
);
/* X-Dash R */ DashingInterval = (int) (XlengthRight / XdashesRight);
if (!(DashingInterval<2))
for (int i=OriginX; i<=XmaxPx; i+=DashingInterval)
CommandToTFT ( "PL(" + String(i) + "," + String(OriginY-2) + "," +
String(i) + "," + String(OriginY+2) + "," +
String(ColorX) + ");"
);
/* Y-Dash-L */ DashingInterval = (int) (YlengthLower / YdashesLower);
if (!(DashingInterval<2))
for (int i=OriginY; i<=YminPx; i+=DashingInterval)
CommandToTFT ( "PL(" + String(OriginX-2) + "," + String(i) + "," +
String(OriginX+2) + "," + String(i) + "," +
String(ColorY) + ");"
);
/* Y-Dash-U */ DashingInterval = (int) (YlengthUpper / YdashesUpper);
if (!(DashingInterval<2))
for (int i=OriginY; i>=YmaxPx; i-=DashingInterval)
CommandToTFT ( "PL(" + String(OriginX-2) + "," + String(i) + "," +
String(OriginX+2) + "," + String(i) + "," +
String(ColorY) + ");"
);
/* Calculating coordinates to display axis endpoint values */
int XminTxtX = Window_X1 - (int)(XminTxt.length()*6) - 1,
XminTxtY = OriginY,
XmaxTxtX = Window_X2 + 1,
XmaxTxtY = OriginY,
YminTxtX = OriginX,
YminTxtY = Window_Y2 + 1,
YmaxTxtX = OriginX,
YmaxTxtY = Window_Y1 - 12 - 1;
/* Controls: If any coordinate is -1, it shall fall beyond display limits
and respective value shall not be displayed */
if (XminTxtX<0) XminTxtX = -1;
if ( (XminTxtY-12) < 0 ) XminTxtY = -1;
if ( (XmaxTxtX+6*XmaxTxt.length()) > DisplayResolutionX ) XmaxTxtX = -1;
if ( (XmaxTxtY+12) > DisplayResolutionY ) XmaxTxtY = -1;
if ( (YminTxtX+6*YminTxt.length()) > DisplayResolutionX ) YminTxtX = -1;
if ( (YminTxtY+12) > DisplayResolutionY ) YminTxtY = -1;
if ( (YmaxTxtX+6*YmaxTxt.length()) > DisplayResolutionX ) YmaxTxtX = -1;
if (YmaxTxtY<0) YmaxTxtY = -1;
/* Range Limit Titles */
if ( ( XminTxtX != -1 ) && ( XminTxtY != -1 ) )
CommandToTFT( "DS12(" + String(XminTxtX) + "," + String(XminTxtY) + ",'" + String(XminTxt) + "'," + String(ColorX) + ");" );
if ( ( XmaxTxtX != -1 ) && ( XmaxTxtY != -1 ) )
CommandToTFT( "DS12(" + String(XmaxTxtX) + "," + String(XmaxTxtY) + ",'" + String(XmaxTxt) + "'," + String(ColorX) + ");" );
if ( ( YminTxtX != -1 ) && ( YminTxtY != -1 ) )
CommandToTFT( "DS12(" + String(YminTxtX) + "," + String(YminTxtY) + ",'" + String(YminTxt) + "'," + String(ColorY) + ");" );
if ( ( YmaxTxtX != -1 ) && ( YmaxTxtY != -1 ) )
CommandToTFT( "DS12(" + String(YmaxTxtX) + "," + String(YmaxTxtY) + ",'" + String(YmaxTxt) + "'," + String(ColorY) + ");" );
/*
Return Value String
Cartesian_Setup() will return a string packing graphic configuration in following format:
"<Xmin,Xmax,Ymin,Ymax,Window_X1,Window_Y1,Window_X2,Window_Y2>"
String starts with '<' and ends by '>'. Each value is delimited by ','
*/
/* Initialize */ String Cartesian_SetupDetails = "<";
Cartesian_SetupDetails += ( String(Xmin) + "," );
Cartesian_SetupDetails += ( String(Xmax) + "," );
Cartesian_SetupDetails += ( String(Ymin) + "," );
Cartesian_SetupDetails += ( String(Ymax) + "," );
Cartesian_SetupDetails += ( String(Window_X1) + "," );
Cartesian_SetupDetails += ( String(Window_Y1) + "," );
Cartesian_SetupDetails += ( String(Window_X2) + "," );
Cartesian_SetupDetails += ( String(Window_Y2) + "," );
/* Close-Out */ Cartesian_SetupDetails += ">";
return Cartesian_SetupDetails;
}
/* ########### End of Cartesian_Setup() ########### */
/* ################################################ */
/* ###############################################
Cartesian_ClearPlotAreas(Descriptor, Color)
Plot Area Reset/Clear Function for Makeblock Me TFT LCD
Input Parameters:
(String) Descriptor : Setup Descriptor - returned by Cartesian_Setup()
(int) Color______: Color to be used to fill plot area
Uses external function CommandToTFT().
############################################### */
void Cartesian_ClearPlotAreas(String Descriptor, int Color)
{
int X1,Y1,X2,Y2; /* Boundary coordinates for plot areas */
/* Extracting values from Descriptor */
/* L[0] L[1] L[2] L[3] W[0] W[1] W[2] W[3] */
/* Xmin Xmax Ymin Ymax Window_X1 Window_Y1 Window_X2 Window_Y2 */
float L[4]; int W[4]; /* Values stored in Descriptor */
int j=0; /* Counter */
String D_Str = "";
for (int i=1; i<=(Descriptor.length()-1); i++)
if ( Descriptor[i] == ',' )
{
if (j<4) L[j]=D_Str.toFloat(); else W[j-4]=D_Str.toInt();
D_Str=""; j++;
}
else
D_Str += Descriptor[i];
/* Origin */ int OriginX = (W[0]+1) + (int)( ( (W[2]-1) - (W[0]+1) ) * abs(L[0]) / (abs(L[1])+abs(L[0])) );
int OriginY = (W[1]+1) + (int)( ( (W[3]-1) - (W[1]+1) ) * abs(L[3]) / (abs(L[3])+abs(L[2])) );
/* Clearing Plot Areas */
//Area.1 : X+ Y+
X1 = OriginX + 2 ; Y1 = W[1] + 1 ;
X2 = W[2] - 1 ; Y2 = OriginY - 2 ;
CommandToTFT ( "BOXF(" + String(X1) + "," + String(Y1) + "," +
String(X2) + "," + String(Y2) + "," +
String(Color) + ");"
);
//Area.2 : X- Y+
X1 = W[0] + 1 ; Y1 = W[1] + 1 ;
X2 = OriginX - 2 ; Y2 = OriginY - 2 ;
CommandToTFT ( "BOXF(" + String(X1) + "," + String(Y1) + "," +
String(X2) + "," + String(Y2) + "," +
String(Color) + ");"
);
//Area.3 : X- Y-
X1 = W[0] + 1 ; Y1 = OriginY + 2 ;
X2 = OriginX - 2 ; Y2 = W[3] - 1 ;
CommandToTFT ( "BOXF(" + String(X1) + "," + String(Y1) + "," +
String(X2) + "," + String(Y2) + "," +
String(Color) + ");"
);
//Area.4 : X+ Y-
X1 = OriginX + 2 ; Y1 = OriginY + 2 ;
X2 = W[2] - 1 ; Y2 = W[3] - 1 ;
CommandToTFT ( "BOXF(" + String(X1) + "," + String(Y1) + "," +
String(X2) + "," + String(Y2) + "," +
String(Color) + ");"
);
}
/* ########### End of Cartesian_ClearPlotAreas() ########### */
/* ######################################################### */
/* ###############################################
Cartesian_Line(Xp, Yp, X, Y, Descriptor, Color)
Cartesian Line Function for Makeblock Me TFT LCD
Input Parameters:
(int) Xp, Yp_____: Previous plot coordinates - y value vs x
(int) X, Y_______: Current plot coordinates - y value vs x
(String) Descriptor : Setup Descriptor - returned by Cartesian_Setup()
(int) Color______: Marking color to be used on (x,y)
Uses external function CommandToTFT().
############################################### */
void Cartesian_Line(float Xp, float Yp, float X, float Y, String Descriptor, int Color)
{
/* Extracting values from Descriptor */
/* L[0] L[1] L[2] L[3] W[0] W[1] W[2] W[3] */
/* Xmin Xmax Ymin Ymax Window_X1 Window_Y1 Window_X2 Window_Y2 */
float L[4]; int W[4]; /* Values stored in Descriptor */
int j=0; /* Counter */
String D_Str = "";
for (int i=1; i<=(Descriptor.length()-1); i++)
if ( Descriptor[i] == ',' )
{
if (j<4) L[j]=D_Str.toFloat(); else W[j-4]=D_Str.toInt();
D_Str=""; j++;
}
else
D_Str += Descriptor[i];
/* Origin */ int OriginX = (W[0]+1) + (int)( ( (W[2]-1) - (W[0]+1) ) * abs(L[0]) / (abs(L[1])+abs(L[0])) );
int OriginY = (W[1]+1) + (int)( ( (W[3]-1) - (W[1]+1) ) * abs(L[3]) / (abs(L[3])+abs(L[2])) );
int XminPx = W[0] + 1;
int XmaxPx = W[2] - 1;
int YmaxPx = W[1] + 1;
int YminPx = W[3] - 1;
if (Y>L[3]) Y=L[3];
if (Y<L[2]) Y=L[2];
float RatioX = (float)( XmaxPx - XminPx ) / ( L[1] - L[0] );
float RatioY = (float)abs( YmaxPx - YminPx ) / ( L[3] - L[2] );
int DispXp = XminPx + (int)( RatioX * ( Xp - L[0] ) );
int DispYp = YminPx - (int)( RatioY * ( Yp - L[2] ) );
int DispX = XminPx + (int)( RatioX * ( X - L[0] ) );
int DispY = YminPx - (int)( RatioY * ( Y - L[2] ) );
if (!(
( ( DispXp >= (OriginX-2) ) && ( DispXp <= (OriginX+2) ) ) ||
( ( DispYp >= (OriginY-2) ) && ( DispYp <= (OriginY+2) ) ) ||
( ( DispX >= (OriginX-2) ) && ( DispX <= (OriginX+2) ) ) ||
( ( DispY >= (OriginY-2) ) && ( DispY <= (OriginY+2) ) )
))
CommandToTFT( "PL(" + String(DispXp) + "," + String(DispYp) + "," + String(DispX) + "," + String(DispY) + "," + String(Color) + ");" );
}
/* ########### End of Cartesian_Line() ########### */
/* ############################################### */
/* ###############################################
readFrequency(_DI_FrequencyCounter_Pin, _ReadingSpeed)
Frequency Reading Function
Input Parameters:
(int) _DI_FrequencyCounter_Pin : Digital pin to be read
(float) _ReadingSpeed____________: Custom reading speed between 0...10 (Note.1)
Note.1: _ReadingSpeed is a value to specify how long shall the changes be counted.
It cannot be 0(zero), negative values or a value greater than 10.
When _ReadingSpeed changed, 1 second shall be divided by this value to calculate
required counting duration. For example;
- _ReadingSpeed = 0.1 -> input shall be counted during 10 seconds (=1/0.1)
- _ReadingSpeed = 0.5 -> input shall be counted during 2 seconds (=1/0.5)
- _ReadingSpeed = 2.0 -> input shall be counted during 0.5 seconds (=1/2)
- _ReadingSpeed = 4.0 -> input shall be counted during 0.25 seconds (=1/4)
Importantly note that, increasing of _ReadingSpeed is a disadvantage especially
on lower frequencies (generally below 100 Hz) since counting error increases
up to 20%~40% by decreasing frequency.
############################################### */
int readFrequency(int _DI_FrequencyCounter_Pin, float _ReadingSpeed)
{
pinMode(_DI_FrequencyCounter_Pin,INPUT);
byte _DigitalRead, _DigitalRead_Previous = 0;
unsigned long _Time = 0, _Time_Init;
float _Frequency = 0;
if ( (_ReadingSpeed<=0) || (_ReadingSpeed>10) ) return (-1);
else
{
_Time_Init = micros();
do
{
_DigitalRead = digitalRead(_DI_FrequencyCounter_Pin);
if ( (_DigitalRead_Previous==1) && (_DigitalRead==0) ) _Frequency++;
_DigitalRead_Previous = _DigitalRead;
_Time = micros();
}
while ( _Time < (_Time_Init + (1000000/_ReadingSpeed)) );
}
return (_ReadingSpeed * _Frequency);
}
/* ########### End of readFrequency() ########### */
/* ############################################## */
/* ###############################################
controllerPID(RangeMin, RangeMax, _E, _Eprev, _dT, _Kp, _Ki, _Kd)
PID Controller Function
Input Parameters:
(float) RangeMin: Minimum limit for output
(float) RangeMax: Maximum limit for output
(float) _E_____: Current error signal
(float) _Eprev : Previous error signal
(float) _dT____: Time difference as seconds
(float) _Kp____: Proportional coefficient
(float) _Ki____: Integral coefficient
(float) _Kp____: Derivative coefficient
Adjustment procedure:
1. Set Kp=0, Ki=0, Kd=0.
2. Start to increase Kp until the system oscillates at fixed period (Pc) and note
critical gain Kc = Kp.
3. Adjust final coefficients as follows.
for P-control only : Kp = 0.50*Kc
for PI-control only : Kp = 0.45*Kc, Ki = 1.2/Pc
for PID-control : Kp = 0.60*Kc, Ki = 2.0/Pc, Kd=Pc/8
4. Fine tuning could be done by slightly changing each coefficient.
############################################### */
float controllerPID(float _E, float _Eprev, float _dT, float _Kp, float _Ki, float _Kd)
{
float P, I, D;
/*
Base Formula: U = _Kp * ( _E + 0.5*(1/_Ki)*(_E+_Eprev)*_dT + _Kd*(_E-_Eprev)/_dT );
*/
P = _Kp * _E; /* Proportional Component */
I = _Kp * 0.5 * _Ki * (_E+_Eprev) * _dT; /* Integral Component */
D = _Kp * _Kd * (_E-_Eprev) / _dT; /* Derivative Component */
return (P+I+D);
}
/* ########### End of controllerPID() ########### */
/* ############################################## */
/* ###############################################
Setup
############################################### */
void setup()
{
Serial1.begin(9600);
Serial1.println("CLS(0);");delay(20);
analogReadResolution(12);
pinMode(_chDirection,INPUT); // Direction selector reading
pinMode(_chMotorCmdCCW,OUTPUT); // PWM output to motor for counter-clockwise turn
pinMode(_chMotorCmdCW,OUTPUT); // PWM output to motor for clockwise turn
// Initial killing the PWM outputs to motor
analogWrite(_chMotorCmdCCW,0); analogWrite(_chMotorCmdCW,0);
// Initial reading for direction selection
Direction=digitalRead(_chDirection); // HIGH=CCW, LOW=CW
prevDirection=Direction;
// The section below prepares TFT LCD
// Cartesian_Setup(Xmin, Xmax, Ymin, Ymax, Window_X1, Window_Y1, Window_X2, Window_Y2, MinDashQty, ColorF, ColorX, ColorY)
Cartesian_SetupDetails = Cartesian_Setup(0, _Tmax, _minRPM, _maxRPM, 20, 20, 220, 120, 10, 0, 7, 7);
CommandToTFT("DS12(250,10,'Dir: CW '," + String(_WHITE) + ");");
CommandToTFT("DS12(250,25,'____ Set'," + String(_YELLOW) + ");");
CommandToTFT("DS12(250,40,'____ RPM'," + String(_GREEN) + ");");
/* Alarm Values */
CommandToTFT("DS12(250,55,'AHH:" + String(RAHH) + "'," + String(_WHITE) + ");");
CommandToTFT("DS12(250,70,'AH :" + String(RAH) + "'," + String(_WHITE) + ");");
CommandToTFT("DS12(250,85,'AL :" + String(RAL) + "'," + String(_WHITE) + ");");
CommandToTFT("DS12(250,100,'ALL:"+ String(RALL) + "'," + String(_WHITE) + ");");
/* Alarm Window */
CommandToTFT("BOX(240,55,319,115," + String(_WHITE) + ");");
/* Alarm Lamps */
CommandToTFT("BOX(240,55,248,70," + String(_WHITE) + ");");
CommandToTFT("BOX(240,70,248,85," + String(_WHITE) + ");");
CommandToTFT("BOX(240,85,248,100," + String(_WHITE) + ");");
CommandToTFT("BOX(240,100,248,115," + String(_WHITE) + ");");
}
/* ###############################################
Loop
############################################### */
void loop()
{
// Initialization Time: Necessary for PID controller.
int InitTime = micros();
// X-Axis Auto-Reset for Graphing
if ( Seconds > 90.0 )
{
Seconds = 0.0;
Cartesian_ClearPlotAreas(Cartesian_SetupDetails,0);
}
// Reading Inputs
/* Controller Coefficients */
Kp = Kpmax * (float)analogRead(_chKp) / 4095;
Ki = Kimax * (float)analogRead(_chKi) / 4095;
Kd = Kdmax * (float)analogRead(_chKd) / 4095;
/* Direction Selector */
Direction = digitalRead(_chDirection); /* HIGH=CCW, LOW=CW */
/* Actual RPM and RPM Setpoint
Note that maximum selectable RPM is 5000. */
RPM = 60 * (float)readFrequency(_chSpeedRead,4) / _DiscSlots;
RPMset = 5000 * (float)analogRead(_chSpeedSet) / 4095;
// Calculations and Actions
/* Error Signal, PID Controller Output and Final Output (PWM) to Motor */
E = RPMset - RPM;
float cPID = controllerPID(E, Eprev, dT, Kp, Ki, Kd);
if ( RPMset == 0 ) OutputRPM = 0;
else OutputRPM = OutputRPM + cPID;
if ( OutputRPM < _minRPM ) OutputRPM = _minRPM;
if ( OutputRPM > _maxRPM ) OutputRPM = _maxRPM;
/* Changing Direction when inverted
Note that no any graphical indication is performed on this function. */
if ( Direction != prevDirection )
{
/* Killing both of the PWM outputs to motor */
analogWrite(_chMotorCmdCCW,0); analogWrite(_chMotorCmdCW,0);
/* Wait until motor speed decreases */
do
{ RPM = 60 * (float)readFrequency(_chSpeedRead,4) / _DiscSlots; }
while ( RPM > _minRPM );
}
// Writing Outputs
if (Direction==HIGH) analogWrite(_chMotorCmdCCW,(int)(255*OutputRPM/_maxRPM));
else analogWrite(_chMotorCmdCW, (int)(255*OutputRPM/_maxRPM));
// Graphing
/* Indicating Direction */
if (Direction==HIGH) CommandToTFT("DS12(280,10,'CCW '," + String(_WHITE) + ");");
else CommandToTFT("DS12(280,10,'CW '," + String(_WHITE) + ");");
/* Plotting Curve */
Cartesian_Line(prevSeconds, prevRPMset, Seconds, RPMset, Cartesian_SetupDetails, _YELLOW);
Cartesian_Line(prevSeconds, prevRPM, Seconds, RPM, Cartesian_SetupDetails, _GREEN);
/* Indicating values of RPM Setpoint, PID Controller Coefficients,
Error Signal, PID Controller Output and Final RPM Output (PWM) */
CommandToTFT( "DS12(20,150,'Set: " + String(RPMset) + " rpm " +
"RPM: " + String(RPM) + " rpm '," + String(_WHITE) + ");");
CommandToTFT( "DS12(20,170,'Kp= " + String(Kp) + " " +
"Ki= " + String(Ki) + " " +
"Kd= " + String(Kd) + " " +
"dT= " + String(dT*1000) + " ms '," + String(_WHITE) + ");");
CommandToTFT( "DS12(20,190,'e= " + String(E) + " " +
"cPID= " + String(cPID) + " " +
"RPMout= " + String(OutputRPM) + " '," + String(_WHITE) + ");");
/* Resetting Alarm Lamps */
CommandToTFT("BOXF(241,56,247,69," + String(_BLACK) + ");");
CommandToTFT("BOXF(241,71,247,84," + String(_BLACK) + ");");
CommandToTFT("BOXF(241,86,247,99," + String(_BLACK) + ");");
CommandToTFT("BOXF(241,101,247,114," + String(_BLACK) + ");");
/* Activating Necessary Alarm Lamps */
if (RPM>=RAHH) CommandToTFT("BOXF(241,56,247,69," + String(_RED) + ");");
if ((RPM>=RAH)&&(RPM<RAHH)) CommandToTFT("BOXF(241,71,247,84," + String(_RED) + ");");
if ((RPM>RALL)&&(RPM<=RAL)) CommandToTFT("BOXF(241,86,247,99," + String(_RED) + ");");
if (RPM<=RALL) CommandToTFT("BOXF(241,101,247,114," + String(_RED) + ");");
// Storing Values generated on previous cycle
Eprev = E; prevRPMset = RPMset; prevRPM = RPM;
prevSeconds = Seconds; prevDirection = Direction;
// Calculating control application cycle time and passed Seconds
dT = float ( micros() - InitTime ) / 1000000.0;
Seconds+=dT;
}
















{kind=link}
Comments