This pandemic made us take a fresh look at everyday things. Not every small store can afford the installation of a sliding door. This pen is touched by EVERY person who enters a store or building. This should not be, especially in the context of the fight against a pandemic.
A simple and reliable solution should have been around. And this is definitely a decent 3D printers and Arduino solution.
Therefore, this project was proposed. It could be expanded on the door of a taxi.
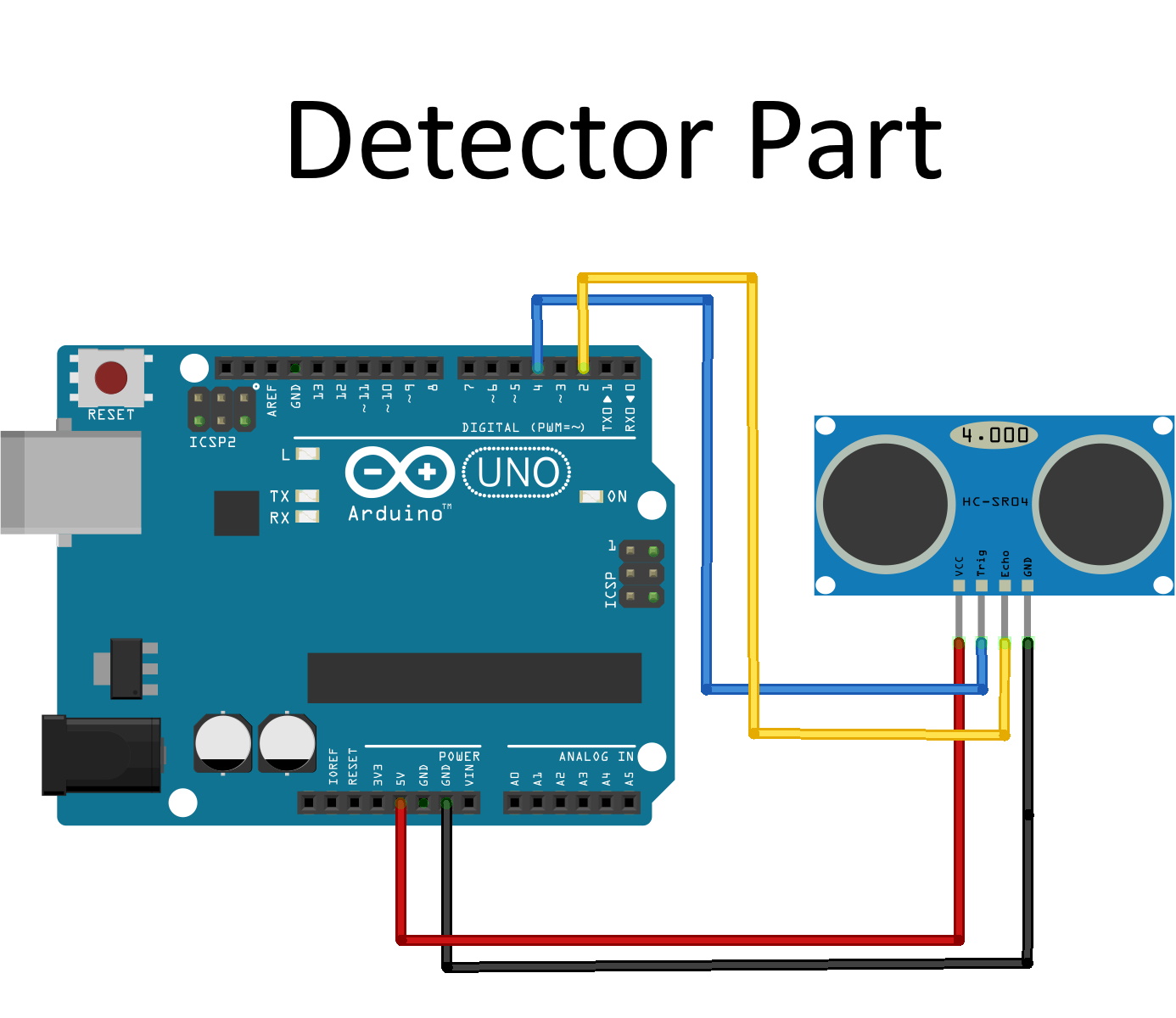
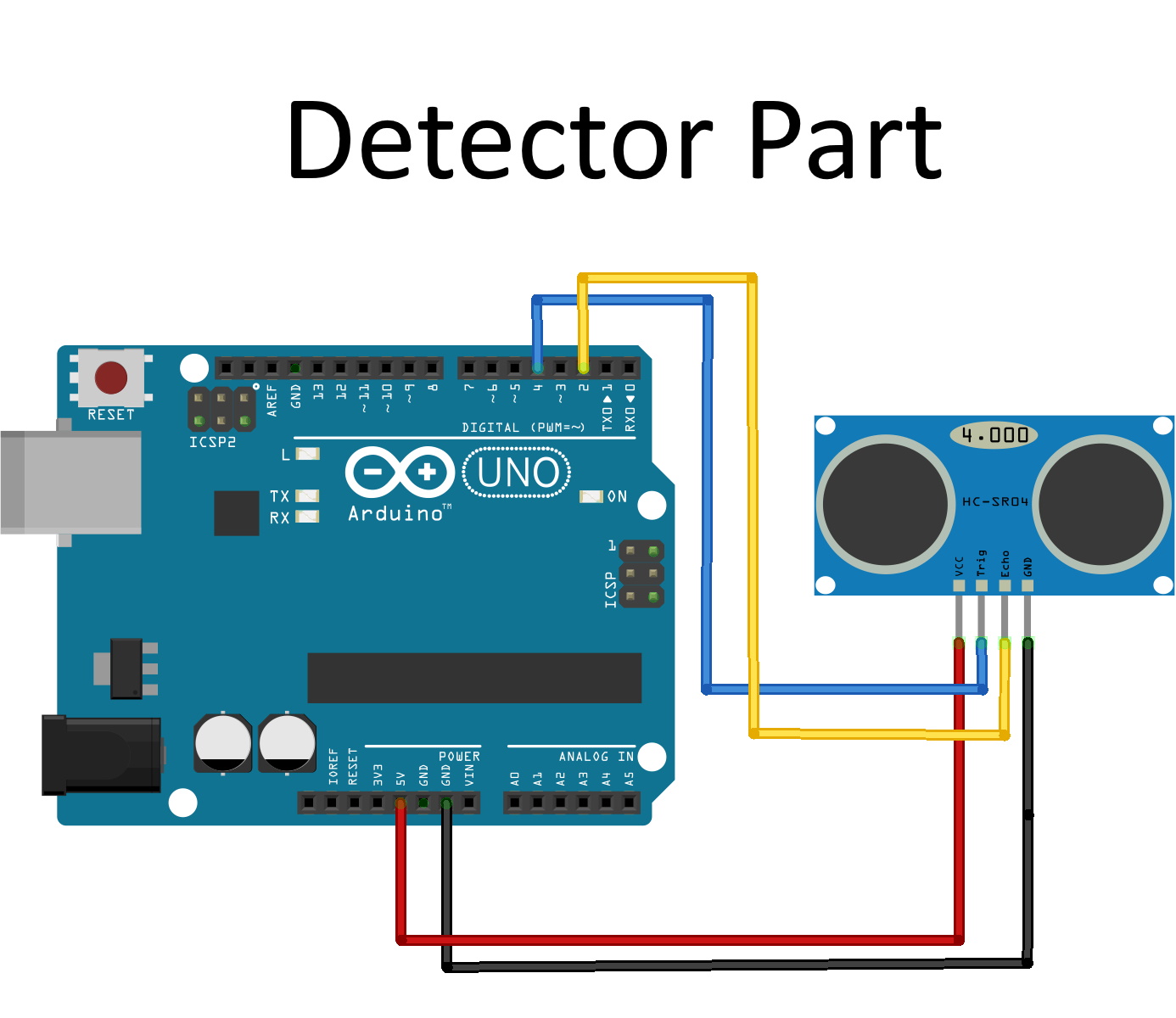
Ultrasonic connection
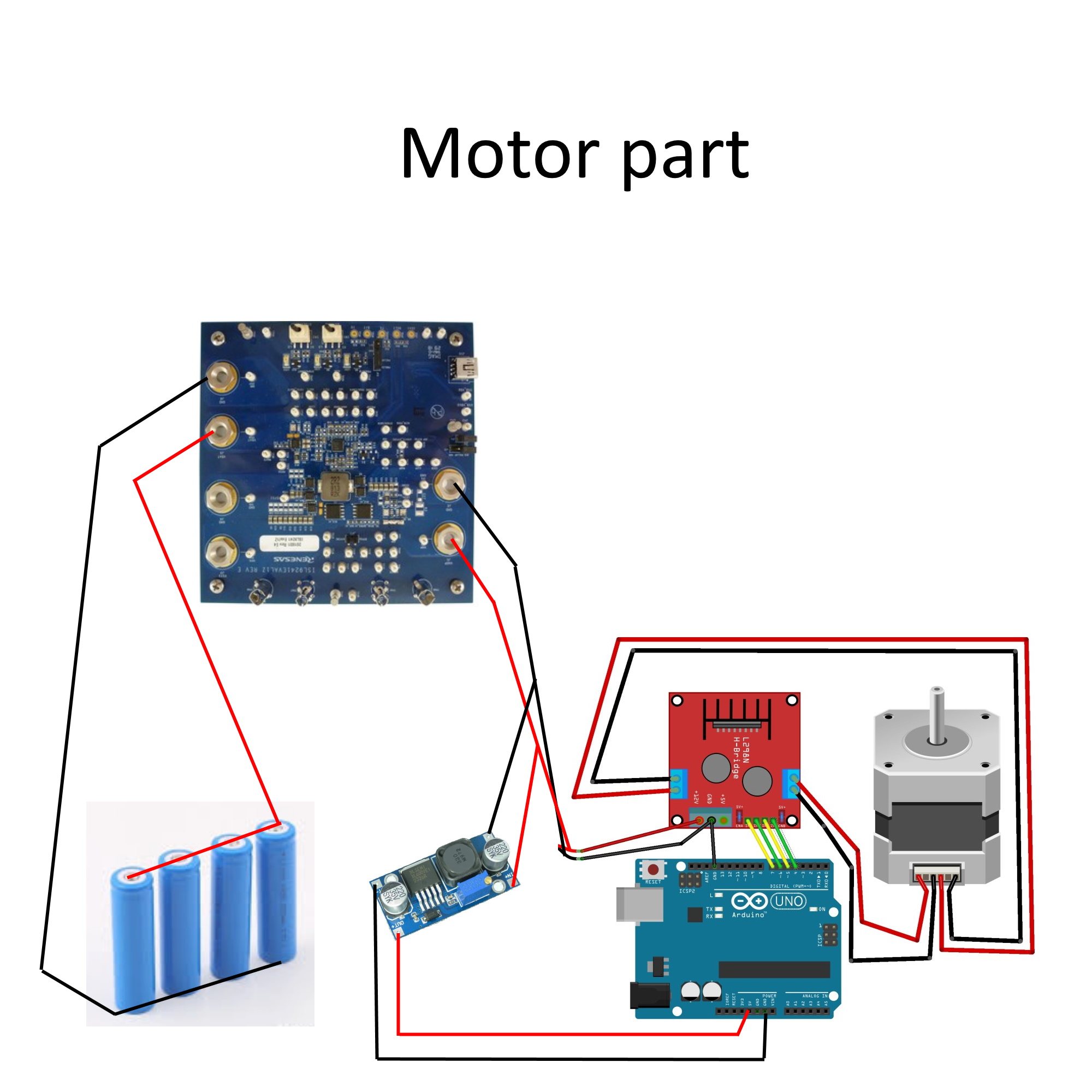
Connection motor part





_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)







_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.