


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
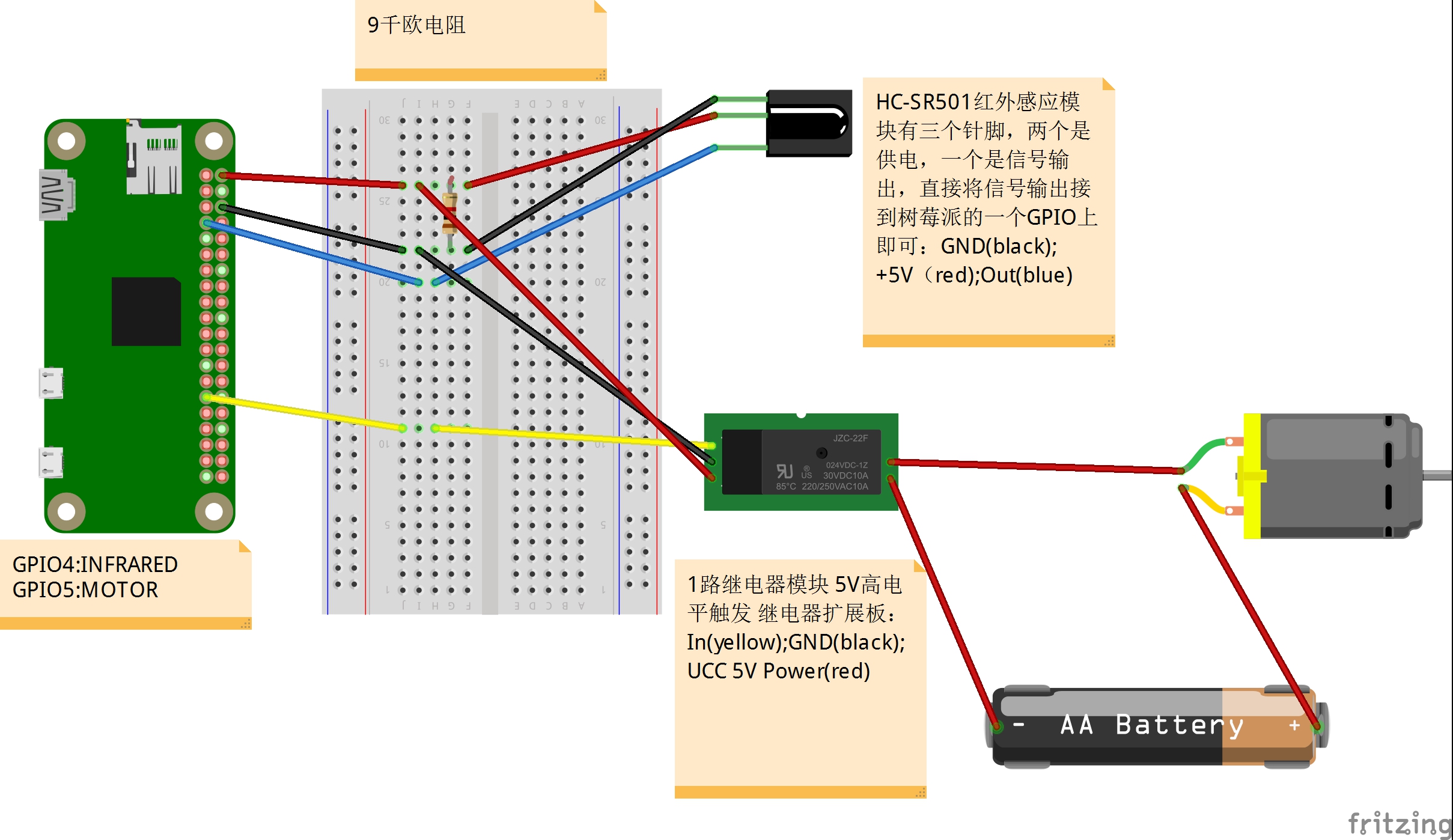
My daughter needs a manual daily toy. With her, she asked me if the toy is too stupid, because it needs to start then it moves, if it like really bugs as I grabbed it then it ran off, the game is interesting as that. So I want to give this toy to add sensors and electronic switch, with the help of Raspberry Pi and Windows IoT, I finished "The running the worms".



{kind=link}
Comments
Please log in or sign up to comment.