


Hardware components | ||||||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
| ||||||
| ||||||
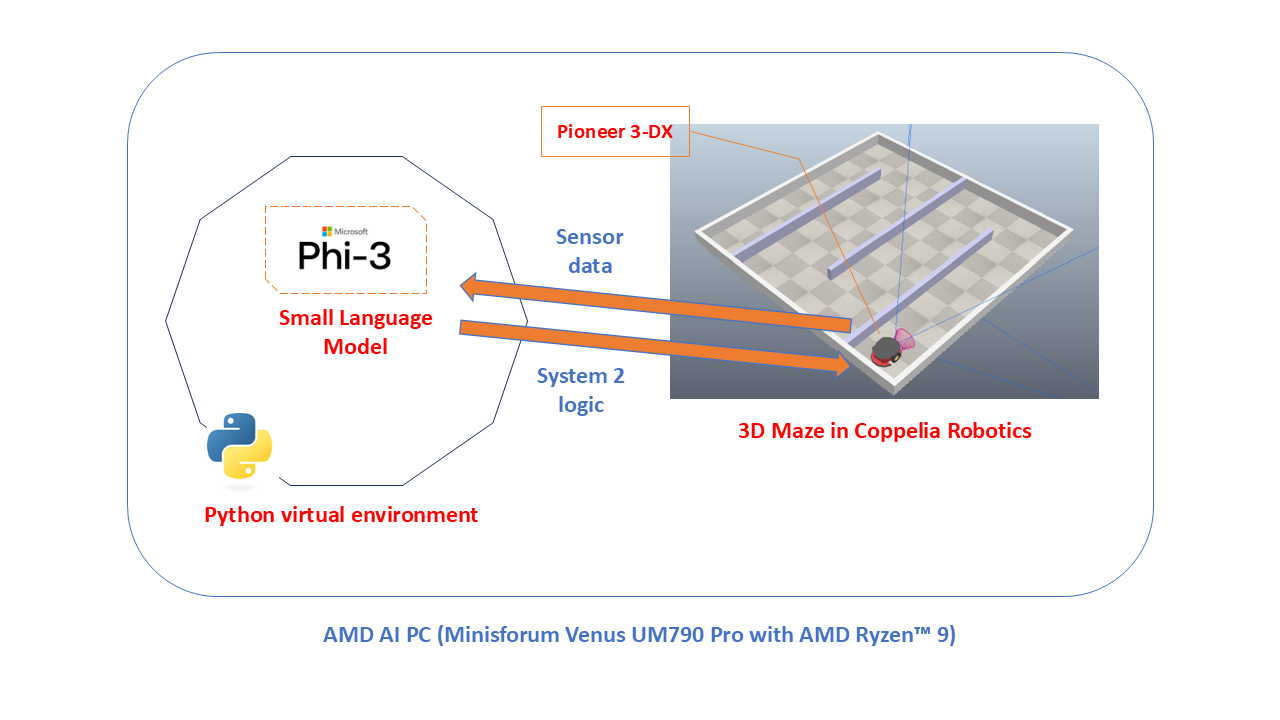
Navigating the maze with Phi-3-powered "System 2" logicProject Overview:
Read moreThis project demonstrates the use of Microsoft’s Phi-3 SLM to power so-called “System 2” logic of Pioneer 3-DX mobile robot and navigate the maze.
As humans, we ourselves often operate in System 1 or System 2 modes:
- "System 1" is our auto-pilot, e.g. for routine tasks like driving a familiar route;
- "System 2" kicks in when something unexpected happens and it requires our conscious decision-making, e.g. braking to avoid hitting an obstacle.
In the robot's case:
- "System 1" is used for a “clear path” situations, which don’t require computational power and thus the robot simply moves forward;
- "System 2" is activated when the robot detects an “obstacle”, to feed then its telemetry to Phi-3 model and decide where to turn.
Note: The maze itself was built in Coppelia Robotics’s simulation environment, while the compute power to run this demo was provided by AMD’s AI PC.Simulation Environment:
Pioneer 3-DX's virtual robotic solution was provided by Coppelia Robotics in CoppeliaSim. Its default configuration was enriched with 4 additional sensors, used in this demo:
- 1x Video camera;
- 3x Proximity sensors.
CoppeliaSim's default 3D scene was also re-designed to build a maze, with internal and external walls made detectable to simulate real-time proximity sensing.
Solution Implementation:- Programmatic interactions with CoppeliaSim require installation of ZMQ Python package. We'll re-use its RemoteAPIClient class:
from coppeliasim_zmqremoteapi_client import RemoteAPIClient- To run Phi-3 locally on AMD AI PC, you need to use Phi-3 model in ONNX format. Pre-trained versions of Phi-3 models can be found on this HuggingFace page.
- This solution was tested on AMD AI PC - Minisforum Venus UM790 PRO with CPU and GPU, kindly provided by Hackster and AMD teams. If your AMD hardware comes with NPU, you can use Vitis AI Quantizer to convert the model into INT8 quantisation, required for inference on Ryzen AI.
- Phi-3 model is initialised from the provided ONNX files. Prompt generation is enabled by the Helper function:
def system2_logic(distance_left, distance_right):
prompt = f"<|system|><YOUR_SPECIFIC_PROMPT><|end|><|assistant|>"
input_tokens = tokenizer.encode(prompt)
params.input_ids = input_tokens
response = ""
generator = og.Generator(model, params)
while not generator.is_done():
generator.compute_logits()
generator.generate_next_token()
new_token = generator.get_next_tokens()[0]
response += tokenizer_stream.decode(new_token)
del generator
return response- To handle potential inconsistencies between the model's output and the expected format, a Helper function is provided to use RegEx to extract speed values for the robot's actuators (left and right wheels):
def extract_first_list(data):
# Join the list into a single string
data_str = ''.join(data)
# Use regex to find the first list pattern
match = re.search(r'\[\s*-?\d+,\s*-?\d+\]', data_str)
if match:
# Extract the matched string
list_str = match.group(0)
# Convert the string to a list of integers
list_values = eval(list_str)
return list_values
else:
return None- Obstacle detection is driven by the handling of robot's front-centre proximity sensor:
response, distance, _, _, _ = sim.handleProximitySensor(proximitySensorHandle)- If no obstacles detected, the robot is using its System 1 logic to maintain the same speed on its left and right wheels:
sim.setJointTargetVelocity(leftMotorHandle, <REQUIRED_SPEED>)
sim.setJointTargetVelocity(rightMotorHandle, <REQUIRED_SPEED>)- If the front-centre proximity sensor will detect any objects, the robot will stop immediately, read distance values from its left and right proximity sensors and request instruction from Phi-3 model as per defined System 2 logic:
_, distance_left, _, _, _ = sim.handleProximitySensor(proximitySensorHandleLeft)
_, distance_right, _, _, _ = sim.handleProximitySensor(proximitySensorHandleRight)
phi3_recommendations = system2_logic(distance_left, distance_right)
phi3_recommendations = extract_first_list(phi3_recommendations)- Relevant speed instructions then will be send to left and right wheels to perform turning manoeuvre:
sim.setJointTargetVelocity(leftMotorHandle, left_wheel_speed)
sim.setJointTargetVelocity(rightMotorHandle, right_wheel_speed)You can find short demo of the working solution here on YouTube.








{kind=link}
Comments