


Hardware components | ||||||
_PnKPri8a6q.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
| ||||||
The Internet of Things (IoT) is a new emerging technology these days, a self configurable and adaptive system consisting of networks of sensors and other object including intelligent objects whose purpose is to interconnect with all things, including everyday and industrial objects, in such a way that they become intelligent, programmable and more capable of interacting with humans.
All the applications that involve IoT, whether industrial, home, etc. are controlled and monitored by certain parameters which are implemented and executed by the user or "other." Therefore, their implementation and execution differs with the sets of parameters, for the execution that is specified or desired by the user.
Arduino board is one of the important objects in this ecosystem, since it facilitates us to connect and control different devices like sensors, LEDs, step motors, servos and mobile phones.
This TutorialThis tutorial describes how to create an Internet of Things with Android and Arduino:
Android application to control a generic servo motor and an LED, according to user speech over mobile phone.
All objects are in the same network for simplicity. The above images shown a above diagram of the system. It consist of 1 Servo Motor is capable of to take in 6 volts and deliver 44.4 oz-in. of maximum torque at 0.18 sec/60° at normal voltage inputs Torque: 38.8/44.4 oz-in. (4.8/6.0V) Speed: 0.20/0.18 sec/60° (4.8/6.0V) and rotate from 0 to 180 degrees and a commercial matrix led lamp of 24 10000 MCD (milli-candela's) leds with features:
- Supply Voltage:----------------------------------- 5 VOLTS
- Voltage Drop Across LED (Forward V):--- 3.4 VOLTS
- Maximum LED Current:------------------------- 20 MILLIAMPS
- # of LEDs connected in parallel:------------ 24 LEDs
The resistor value needed for the current limiting resistor used when powering the LEDs.
- Calculated Limiting Resistor:------------------- 3.333 OHMS
- Nearest higher rated 10% resistor:----------- 3.9 OHM
- Calculated Resistor Wattage:------------------ 0.768 WATTS
- Recommended Resistor power rating of:-- 1.28 WATTS
Then we have IOT implementation taking place with the help of CC3000 which is then allowing us to send parameters in this case "speech words" using mobile App which in this case is above is a hosting platform.
The mobile device sends information "lowercase text string type" to the IOT "CC3000" which is interfaced with the Arduino Micro, the Servo Motor and led lamp, this information is obtained from the mobile application when the user speaks with the microphone that the application recognizes the word and sends the text match or matches "you can select that on the app", to the Arduino Micro via a UDP or TCP client "you can set on the app" that runs on the mobile application and with the help of the CC3000, so the micro Arduino can either power the servomotor or turn off the led lamp.
Video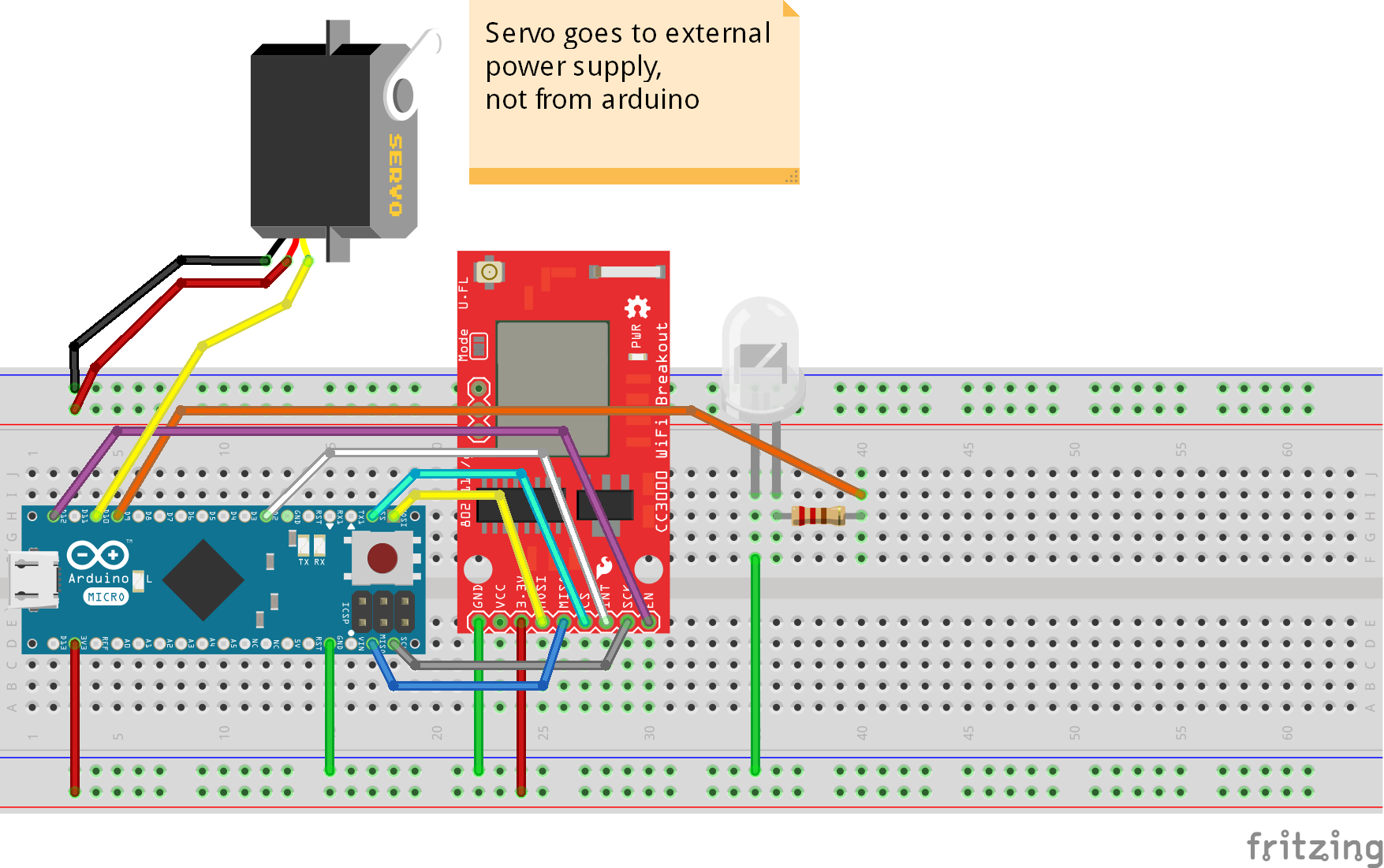




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.