


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 4 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
 |
| |||||
Introduction To Ameba RTL8722DM Board (AMB 21)
Ameba RTL8722DM IoT Development Board integrates the RTL8722DM SoC which is the latest generation SoC of the Ameba IoT solution family, and it is powered by a high-performance 32-bit dual MCU with a new architecture from Arm. an Arm v8M (Cortex-M33 instruction set compatible) running at up to 200MHz and an Arm®v8M (Cortex-M23 instruction set compatible) running at up to 20MHz.
RTL872xD is a highly integrated single-chip low power dual bands (2.4GHz and 5GHz) Wireless LAN (WLAN) and Bluetooth Low Energy (BLE 5.0) communication controller. It consists of a high-performance MCU (Armv8-M, Cortex-M33 instruction set compatible) called Real-M300 (or KM4 thereafter) and a low power MCU (Armv8-M, Cortex-M23 instruction set compatible) called Real-M200 (or KM0 thereafter), WLAN (802.11 a/b/g/n) MAC, a 1T1R capable WLAN baseband, RF, Bluetooth, and peripherals. High-speed connectivity interfaces, SDIO, and USB are provided. There are also audio codec, Key-Scan, and touch keys integrated into this IC. Besides, flexible design configures GPIO to different functions according to applications. RTL872xD also integrates memories (ROM/SRAM/PSRAM) for IoT (Internet of Things) Wi-Fi protocol functions and applications. The user-friendly development kits (SDK and HDK) are supported to customers for developing IoT applications. The KM4 MCU is a 32-bit core that offers system enhancements such as low power consumption, enhanced debug features, floating-point computation, DSP instructions, and a high level of support block integration. The KM4 MCU incorporates a 3-stage pipeline. The KM0 coprocessor is an energy-efficient and easy-to-use 32-bit core that is code- and tool-compatible with the KM4 core. The KM0 coprocessor offers up to 20MHz performance with a simple instruction set and reduced code size.
- Ultra-low power consumption suitable for IoT applications
- Latest high-security architecture with secure boot
- Dual Arm® powered CPUs for higher performance
- Fast wireless speeds with the latest wireless technologies such as Wi-Fi 5GHz and BLE5
- Rich I/O peripherals to further expand your projects
- 32-bit Arm®Cortex®-M4, up to 200MHz.32-bit Arm®Cortex®-M0, up to 20MHz.
- 512KB SRAM + 4MB PSRAM
Integrated 802.11a/n Wi-Fi SocTrust zone-M SecurityHardware SSL EngineRoot Trust Secure BootUSB Host/DeviceSD HostBLE5.0CodecLCDCKey Matrix
OTHER FEATURES1 PCM interface4 UART interface1 I2S Interface2 I2C interface7 ADC17 PWMMax 54 GPIO
The wireless features of RTL872xD
Wi-Fi Features
- 802.11 a/b/g/n 1x1, 2.4GHz & 5GHz
- Supports 20MHz/40MHz up to MCS7 l Low power architecture
- Low power Tx/Rx for short-range application @1.8V
- Low power beacon listen mode l Low power Rx mode
- Very low power suspends mode (DLPS)
- Built-in PA, also supports external PA and LNA
- Supports Antenna diversity
- Internal PTA interface for arbitrating data transmission between Wi-Fi and internal Bluetooth or external 2.4G devices
Bluetooth Features
- BLE 5.0
- Both central and peripheral modes
- High power mode (8dbm, shares the same PA with Wi-Fi)
- Internal co-existence mechanism between Wi-Fi and BT to share the same antenna
To Learn More About The Ameba RTL8722DM Board (AMB 21) go through this link click Here.
_______________________________________________________________
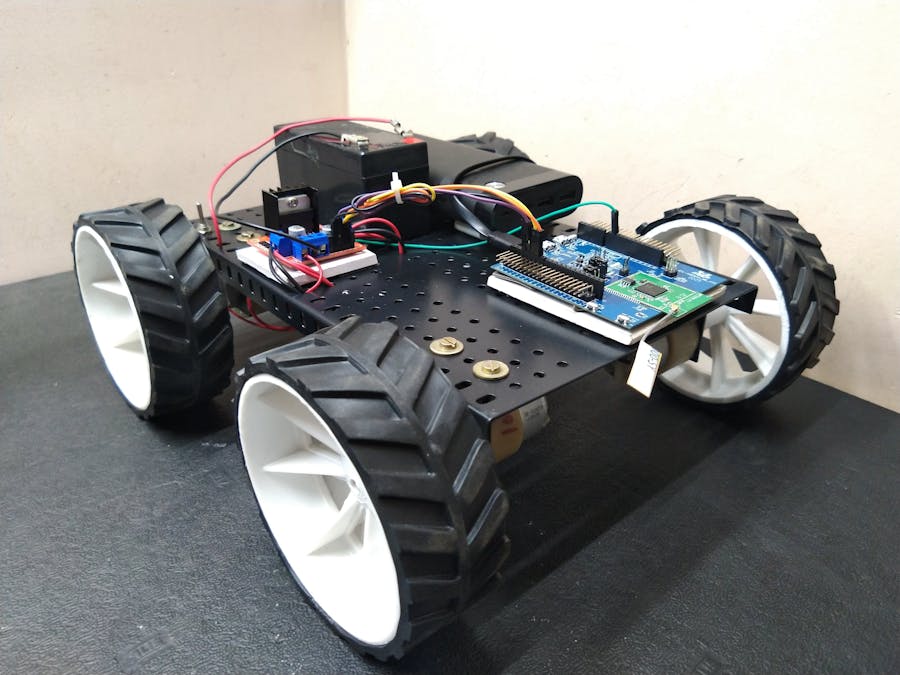
Here I am showcasing BLE Robot Car Controlling With Bluefruit Connect App
Working Of BLE Robot Car Controlling With Bluefruit Connect App
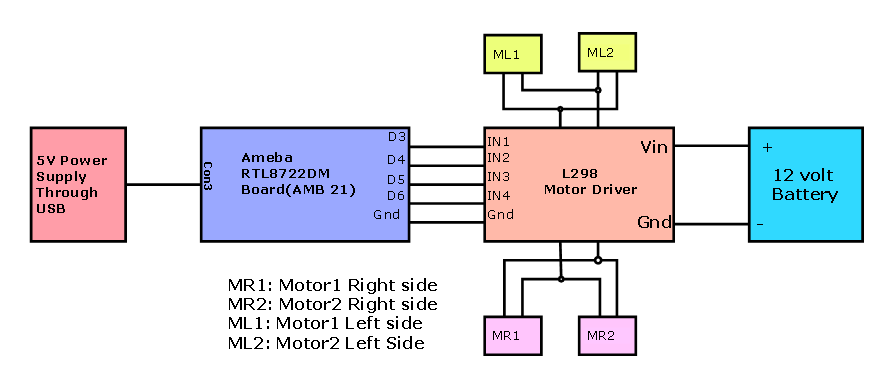
I am controlling a robot car using the Bluefruit connect app. The app sends the Particular commands when I press the control pad on the app. on the receiver side, I have used Realtek Ameba RTL8722DM (AMB21) Board. The RTL8722DM receives the Bluetooth data and processes the received data and sends the Contro signal to the Motor Driver. The motor Driver Controls the Four motors according to the control signals.
Demo Video
Useful Links
1. https://www.amebaiot.com/en/rtl8722dm-arduino-online-api-documents/



_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.